[Tracking] KCF + KalmanFilter目标跟踪
基于KCF和MobileNet V2以及KalmanFilter的摄像头监测系统
简介
这是一次作业。Tracking这一块落后Detection很多年了,一般认为Detection做好了,那么只要能够做的足够快,就能达到Tracking的效果了,实则不然,现在最快的我认为就是一些可以在手机等arm下使用的轻量神经网络了,但是其牺牲了准确性,依然达不到追踪的效果,因为你无法将多次识别的Object视为统一对象画出运动轨迹。Tracking与Detection的根本区别在于Tracking可以很快的识别,因为基本上只需要识别一次,然后调用跟踪算法对目标进行跟进就可以了,而跟踪算法只需要在目标所在位置附近进行搜‘索判断是否存在目标就可以了,不用像Detection那样整张图遍历来寻找目标。而本篇也是使用的是轻量神经网络MobileNet和MIL以及KCF追踪算法,两者结合使用,达到了一定的追踪效果。
由于比赛需要,我改了一改,做成了robomaster的追踪程序。。
难点&解决
多个人的追踪
对于同时能够追踪多目标,我的想法是写一个Person类,实例化出不同的person对象,对个person对象只完成自己对象本身的追踪工作,不会干扰到其他对象的追踪。在对象走出视频流区域一段时间(可以作为参数设置)后将对象销毁。对于初始化问题,可以采用MobieNet的训练结果进行对象参数的初始化,当视频流中没有目标时只运行MobileNet的识别即可。识别必须每隔一段时间进行一次,将那些识别出的人与我们已经实例化出的人进行距离比较,相当于一个匹配,已有的保留,没有的再继续进行实例化,然后追踪。
人从各个方向运动的追踪
由于人可能从各个方向进入视频流,因此对分类器的要求会比较高,所以我们需要训练大量的实地场景的各种姿态进入视频流的图片,当然,由于宿舍空间有限,我没办法做出人从监视器各个角度各个方向进出的训练集。因此这个问题其实有待解决,但是我觉得可以通过丰富训练集来解决(废话)。
人遮挡状态下的追踪
对于遮挡状态下的追踪,我打算这么解决,遮挡首先分为短时间遮挡和长时间遮挡,对于短时间遮挡我们可以采用消失计时的方法,设置一个阈值,在消失阈值范围内输出原框,或者原来有速度进行一个预测,但是预测肯定会出问题,因为预测是按照前一帧的速度来预测的,因此预测的框会一直按照速度方向平移,所以速度应该在预测的时候逐渐减小,这样才能避免一直有速度的预测。还有就是可以通过卡尔曼滤波来做,这个我有做的打算,正在研究他的论文。这个问题属于Long-Term-Tracking问题,现有的方法有的是采用分块识别,就是分别识别人的某一部分,然后把识别到的结果合起来以及其他方法,具体还在看。
光照条件变化时候的追踪
对于光照变化的时候的追踪,我觉得这就完全可以交给我们的神经网络,神经网络提取的特征是可以保证在多尺度和各种光照条件下实现较高准确度的分类的,因此,在光照较暗和光照较强的条件下我们的神经网络都可以取得比较好的效果,因此是可以完成识别的任务的。
KCF & KalmanFilter
KCF
KCF算法是核相关滤波的简称,利用循环移位进行稠密采样,FFT快速变换进行分类器的训练,同时结合了多通道的HOG特征,大致的流程是,先利用循环矩阵不断对图像移位,得到多个样本,在第t帧中的当前位置附近利用这些样本训练一个分类器,这个分类器可以对框中是否有人做出一个概率响应,因此当我们来到下一帧的时候呢,先用循环矩阵对前一帧的区域进行循环移位得到若干样本,然后用前一帧训练的分类器分类得到输出响应,以响应最大的作为预测位置,然后再训练,再预测。这个算法的推导我会专门写一篇博客。
Kalman波波
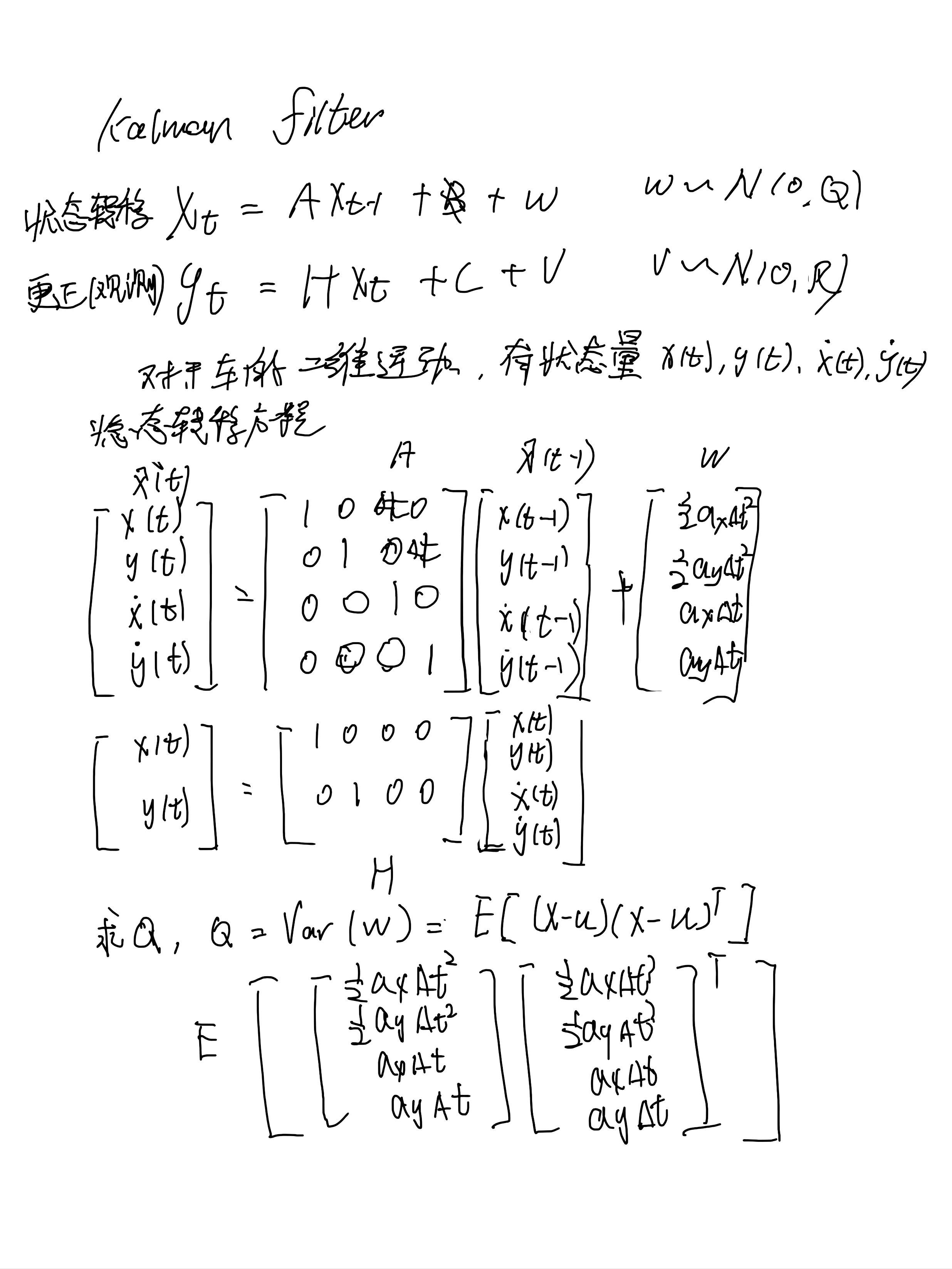
状态方程:
测量方程:
xk是状态向量,zk是测量向量,Ak是状态转移矩阵,uk是控制向量,Bk是控制矩阵,wk是系统误差(噪声),Hk是测量矩阵,vk是测量误差(噪声)。wk和vk都是高斯噪声,即

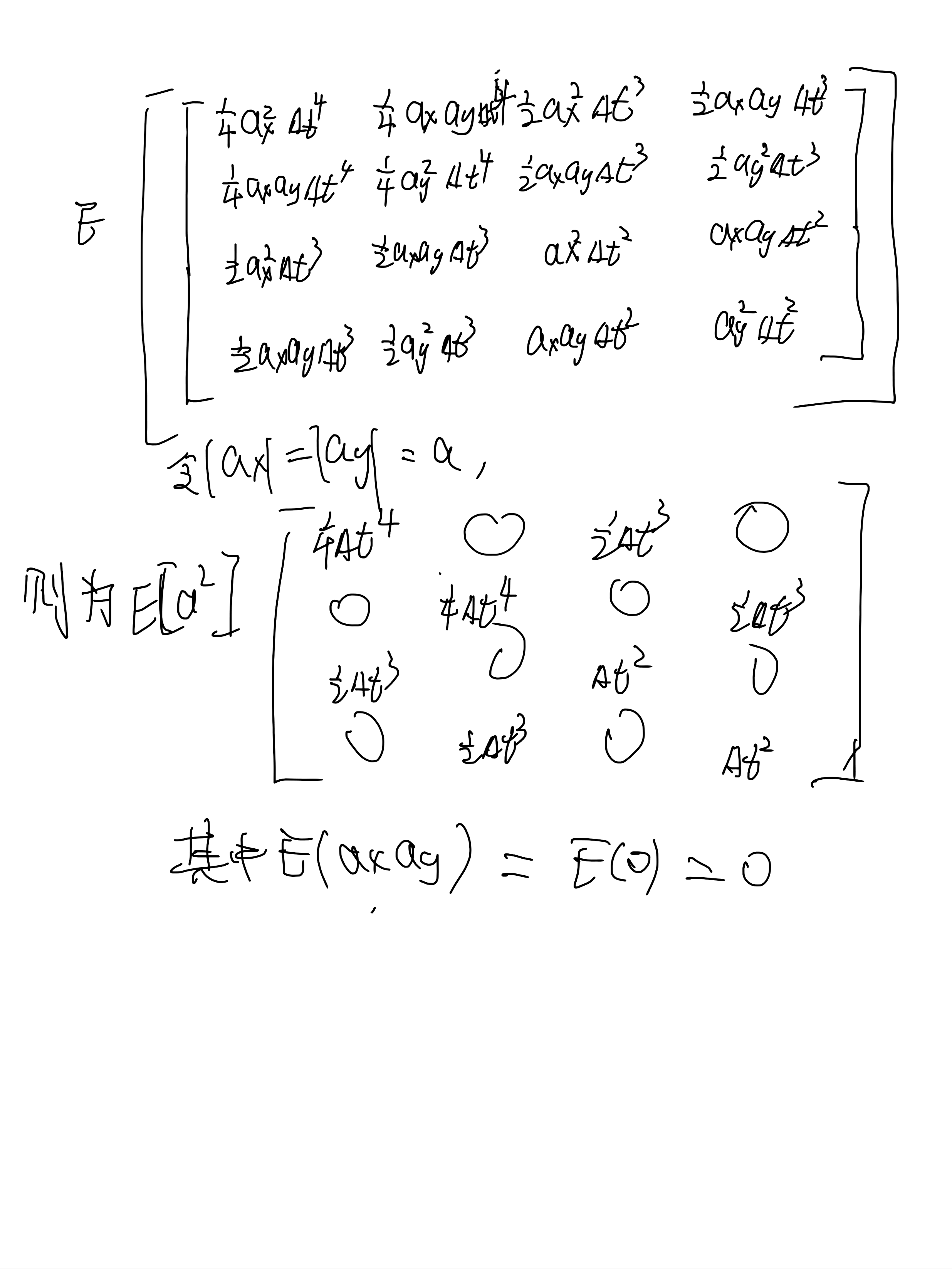
实际应用的推导过程如下:
使用
关于使用KCF,我是写了个类,这样可以做多目标的跟踪,不然就只能单目标啦。而且加入了kalmanfilter来预测并且修正观测值。
class Person:
def __init__(self, bg, bbox,delta_time = 0.2 ,acc = 2):
self._zs = 0
self._bbox = bbox
self._tracker = cv.TrackerKCF_create()
self._center = (int(bbox[0]+bbox[2]/2), int(bbox[1]+bbox[3]/2))
self._mask = np.zeros(bg.shape, dtype = np.uint8)
self._shape = bg.shape
self._no_time = 0
self._tracker.init(bg,bbox)
self._frame = bg
self._predicted = None
self.kalman = cv.KalmanFilter(4,2,0)# 状态空间4D 分别是x y vx vy,测量空间2D 分别是 x y
self.kalman.transitionMatrix = np.array([[1,0,delta_time,0],[0,1,0,delta_time],[0,0,1,0],[0,0,0,1]],dtype = np.float32)
self.kalman.measurementMatrix = np.array([[1,0,0,0],[0,1,0,0]],dtype = np.float32)
self.kalman.statePre = np.array([[self._center[0]],[self._center[1]],[0],[0]],dtype = np.float32)
self.kalman.statePost = np.array([[self._center[0]],[self._center[1]],[0],[0]],dtype = np.float32)
self.kalman.processNoiseCov = acc * np.array([[0.25*delta_time**4,0,0.5*delta_time**3,0],[0,0.25*delta_time**4,0,0.5*delta_time**3],[0.5*delta_time**3,0,delta_time**2,0],[0,0.5*delta_time**3,0,delta_time**2]],dtype = np.float32)
def update(self,new_bbox,center):
self._bbox = new_bbox
self._center = center
def precess(self,src):
self._zs = self._zs + 1
h,w = self._shape[:2]
frame = copy.copy(src)
padding = 5 # padding
ret, bbox = self._tracker.update(frame) # bbox: x y w h
p1,p2 = (int(bbox[0]),int(bbox[1])),(int(bbox[0])+int(bbox[2]),int(bbox[1])+int(bbox[3]))
center = (int((p1[0]+p2[0])/2),int((p1[1]+p2[1])/2))
global person_count
if self._no_time == 20:
self._no_time = 0
self._mask = np.zeros(self._shape,dtype=np.uint8)
self._frame = src
return (False,src)
if ret and p1[0]>=padding and p1[1]<= (w-padding):#and int(bbox[0])>=padding and int(bbox[0] + bbox[2])<= (w-padding) #and int(bbox[1])>=padding and int(bbox[1] + bbox[3])<=(h-padding)
self._no_time = 0
s = np.array([[np.float32(center[0])],[np.float32(center[1])]])
self.kalman.correct(s)
center = self.kalman.predict().astype(np.int)
#print(center[0],center[1])
center = (center[0,0],center[1,0])
cv.line(self._mask,self._center,center,(255,255,0),2)
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
self.update(bbox,center)
#self._predicted = [self._bbox[i]+self._speed[i] if i<2 else self._bbox[i] for i in range(4)]
#predict_1,predict_2 = (int(self._predicted[0]),int(self._predicted[1])),(int(self._predicted[0])+int(self._predicted[2]),int(self._predicted[1])+int(self._predicted[3]))
#cv.rectangle(self._frame,predict_1,predict_2,(0,255,255),2,1) # 画预测框
#cv.putText(self._frame,"predicted",predict_1,cv.FONT_HERSHEY_SIMPLEX,0.5,(0,255,255),2)
cv.rectangle(self._frame, p1, p2, (255, 0, 0), 2, 1) # 画识别框
cv.putText(self._frame,"recognized",p2,cv.FONT_HERSHEY_SIMPLEX,0.5,(255,0,0),2)
#cv.waitKey(10)
return (True,self._frame)
else:
ret,bbox = recg_car(frame)
if ret:
p1,p2 = (int(bbox[0]),int(bbox[1])),(int(bbox[0])+int(bbox[2]),int(bbox[1])+int(bbox[3]))
center = (int((p1[0]+p2[0])/2),int((p1[1]+p2[1])/2))
s = np.array([[np.float32(center[0])],[np.float32(center[1])]])
self.kalman.correct(s)
center = self.kalman.predict().astype(np.int)
center = (center[0,0],center[1,0])
cv.line(self._mask,self._center,center,(255,255,0),2)
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
self.update(bbox,center)
cv.rectangle(self._frame, p1, p2, (255, 0, 0), 2, 1) # 画识别框
cv.putText(self._frame,"recognized",p2,cv.FONT_HERSHEY_SIMPLEX,0.5,(255,0,0),2)
return (True,self._frame)
else:
self._no_time = self._no_time + 1
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
return (True,self._frame)
使用MobileNet V2模型进行训练和预测
关于训练过程我就不一一介绍了,之前的博客也有写到怎么做,直接贴代码(完整的)。
import cv2 as cv
import sys
import numpy as np
import os
import copy
import tensorflow as tf
sys.path.append("..")
from utils import label_map_util
from utils import visualization_utils as vis_util
DEBUG = False # 表示不是调试模式
THRE_VAL = 0.4 # 这里设置的是置信度的阈值,如果大于这个阈值就在图像里面把他给框出来
# ['BOOSTING', 'MIL', 'KCF', 'TLD', 'MEDIANFLOW', 'GOTURN']
#tracker = cv.TrackerKCF_create()
#tracker = cv.TrackerMIL_create()
PATH_TO_CKPT ='/home/xueaoru/trace/car/frozen_inference_graph.pb' #网络结构配置文件
PATH_TO_LABELS = '/home/xueaoru/trace/car/label_map.pbtxt' # 标签映射关系配置文件
NUM_CLASSES = 2 # 分类数目
label_map = label_map_util.load_labelmap(PATH_TO_LABELS) # 调用函数加载labelmap,相当于把文本转换成了json文件
categories = label_map_util.convert_label_map_to_categories(label_map, max_num_classes=NUM_CLASSES, use_display_name=True)
# 上面一句是把每个labelmap格式的数据转换为dict类型的数据,每隔id对应一个输出的name
category_index = label_map_util.create_category_index(categories) # 得到每个id,也就是key
detection_graph = tf.Graph() #加载默认图
with detection_graph.as_default():
od_graph_def = tf.GraphDef()
with tf.gfile.GFile(PATH_TO_CKPT, 'rb') as fid:# 加载网络模型
serialized_graph = fid.read()
od_graph_def.ParseFromString(serialized_graph)
tf.import_graph_def(od_graph_def, name='')
sess = tf.Session(graph=detection_graph)# 运行开启session
image_tensor = detection_graph.get_tensor_by_name('image_tensor:0')
detection_boxes = detection_graph.get_tensor_by_name('detection_boxes:0')
detection_scores = detection_graph.get_tensor_by_name('detection_scores:0')
detection_classes = detection_graph.get_tensor_by_name('detection_classes:0')
num_detections = detection_graph.get_tensor_by_name('num_detections:0')
cap = cv.VideoCapture("/home/xueaoru/下载/red1.mp4")
#cap = cv.VideoCapture(1)
person_exist = False
class Person:
def __init__(self, bg, bbox,delta_time = 0.2 ,acc = 2):
self._zs = 0
self._bbox = bbox
self._tracker = cv.TrackerKCF_create()
self._center = (int(bbox[0]+bbox[2]/2), int(bbox[1]+bbox[3]/2))
self._mask = np.zeros(bg.shape, dtype = np.uint8)
self._shape = bg.shape
self._no_time = 0
self._tracker.init(bg,bbox)
self._frame = bg
self._predicted = None
self.kalman = cv.KalmanFilter(4,2,0)# 状态空间4D 分别是x y vx vy,测量空间2D 分别是 x y
self.kalman.transitionMatrix = np.array([[1,0,delta_time,0],[0,1,0,delta_time],[0,0,1,0],[0,0,0,1]],dtype = np.float32)
self.kalman.measurementMatrix = np.array([[1,0,0,0],[0,1,0,0]],dtype = np.float32)
self.kalman.statePre = np.array([[self._center[0]],[self._center[1]],[0],[0]],dtype = np.float32)
self.kalman.statePost = np.array([[self._center[0]],[self._center[1]],[0],[0]],dtype = np.float32)
self.kalman.processNoiseCov = acc * np.array([[0.25*delta_time**4,0,0.5*delta_time**3,0],[0,0.25*delta_time**4,0,0.5*delta_time**3],[0.5*delta_time**3,0,delta_time**2,0],[0,0.5*delta_time**3,0,delta_time**2]],dtype = np.float32)
def update(self,new_bbox,center):
self._bbox = new_bbox
self._center = center
def precess(self,src):
self._zs = self._zs + 1
h,w = self._shape[:2]
frame = copy.copy(src)
padding = 5 # padding
ret, bbox = self._tracker.update(frame) # bbox: x y w h
p1,p2 = (int(bbox[0]),int(bbox[1])),(int(bbox[0])+int(bbox[2]),int(bbox[1])+int(bbox[3]))
center = (int((p1[0]+p2[0])/2),int((p1[1]+p2[1])/2))
global person_count
if self._no_time == 20:
self._no_time = 0
self._mask = np.zeros(self._shape,dtype=np.uint8)
self._frame = src
return (False,src)
if ret and p1[0]>=padding and p1[1]<= (w-padding):#and int(bbox[0])>=padding and int(bbox[0] + bbox[2])<= (w-padding) #and int(bbox[1])>=padding and int(bbox[1] + bbox[3])<=(h-padding)
self._no_time = 0
s = np.array([[np.float32(center[0])],[np.float32(center[1])]])
self.kalman.correct(s)
center = self.kalman.predict().astype(np.int)
#print(center[0],center[1])
center = (center[0,0],center[1,0])
cv.line(self._mask,self._center,center,(255,255,0),2)
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
self.update(bbox,center)
#self._predicted = [self._bbox[i]+self._speed[i] if i<2 else self._bbox[i] for i in range(4)]
#predict_1,predict_2 = (int(self._predicted[0]),int(self._predicted[1])),(int(self._predicted[0])+int(self._predicted[2]),int(self._predicted[1])+int(self._predicted[3]))
#cv.rectangle(self._frame,predict_1,predict_2,(0,255,255),2,1) # 画预测框
#cv.putText(self._frame,"predicted",predict_1,cv.FONT_HERSHEY_SIMPLEX,0.5,(0,255,255),2)
cv.rectangle(self._frame, p1, p2, (255, 0, 0), 2, 1) # 画识别框
cv.putText(self._frame,"recognized",p2,cv.FONT_HERSHEY_SIMPLEX,0.5,(255,0,0),2)
#cv.waitKey(10)
return (True,self._frame)
else:
ret,bbox = recg_car(frame)
if ret:
p1,p2 = (int(bbox[0]),int(bbox[1])),(int(bbox[0])+int(bbox[2]),int(bbox[1])+int(bbox[3]))
center = (int((p1[0]+p2[0])/2),int((p1[1]+p2[1])/2))
s = np.array([[np.float32(center[0])],[np.float32(center[1])]])
self.kalman.correct(s)
center = self.kalman.predict().astype(np.int)
center = (center[0,0],center[1,0])
cv.line(self._mask,self._center,center,(255,255,0),2)
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
self.update(bbox,center)
cv.rectangle(self._frame, p1, p2, (255, 0, 0), 2, 1) # 画识别框
cv.putText(self._frame,"recognized",p2,cv.FONT_HERSHEY_SIMPLEX,0.5,(255,0,0),2)
return (True,self._frame)
else:
self._no_time = self._no_time + 1
mmask = cv.cvtColor(self._mask.astype(np.uint8),cv.COLOR_BGR2GRAY)
mmask = cv.bitwise_not(mmask)
self._frame = cv.add(frame, self._mask, mask = mmask)
return (True,self._frame)
def recg_car(frame):
image_expanded = np.expand_dims(frame, axis=0)
(boxes, scores, classes, num) = sess.run(
[detection_boxes, detection_scores, detection_classes, num_detections],
feed_dict={image_tensor: image_expanded})
score = np.squeeze(scores)
max_index = np.argmax(score)
score = score[max_index]
# print(score)
if score > THRE_VAL:
box = np.squeeze(boxes)[max_index]#(ymin,xmin,ymax,xmax)
h,w,_ = frame.shape
min_point = (int(box[1]*w),int(box[0]*h))
max_point = (int(box[3]*w),int(box[2]*h))
bbox = (min_point[0], min_point[1], max_point[0]-min_point[0], max_point[1] - min_point[1])
return True,bbox
else:
return False,None
ret, frame = cap.read()
if not ret:
print("err")
sys.exit()
ret,bbox = recg_car(frame)
person = Person(frame,bbox)
while True:
ret,frame = cap.read()
time = cv.getTickCount()
if not ret:
break
person_exist,frame = person.precess(frame)
cv.imshow("frame",frame)
time = cv.getTickCount() - time
print("处理时间:"+str(time*1000/cv.getTickFrequency())+"ms")
key = cv.waitKey(1) & 0xff
if key ==27:
break
cap.release()
cv.destroyAllWindows()
[Tracking] KCF + KalmanFilter目标跟踪的更多相关文章
- KCF目标跟踪方法分析与总结
KCF目标跟踪方法分析与总结 correlation filter Kernelized correlation filter tracking 读"J. F. Henriques, R. ...
- Video Target Tracking Based on Online Learning—深度学习在目标跟踪中的应用
摘要 近年来,深度学习方法在物体跟踪领域有不少成功应用,并逐渐在性能上超越传统方法.本文先对现有基于深度学习的目标跟踪算法进行了分类梳理,后续会分篇对各个算法进行详细描述. 看上方给出的3张图片,它们 ...
- Video Target Tracking Based on Online Learning—TLD单目标跟踪算法详解
视频目标跟踪问题分析 视频跟踪技术的主要目的是从复杂多变的的背景环境中准确提取相关的目标特征,准确地识别出跟踪目标,并且对目标的位置和姿态等信息精确地定位,为后续目标物体行为分析提供足 ...
- CVPR2018 关于视频目标跟踪(Object Tracking)的论文简要分析与总结
本文转自:https://blog.csdn.net/weixin_40645129/article/details/81173088 CVPR2018已公布关于视频目标跟踪的论文简要分析与总结 一, ...
- 目标跟踪之相关滤波:CF及后续改进篇
一. 何为相关滤波? Correlation Filter 最早应用于信号处理,用来描述两个信号之间的相关性,或者说相似性(有点像早期的概率密度),先来看定义: 对于两个数据 f 和 g,则两个信号的 ...
- Python Opencv-contrib Camshift&kalman卡尔曼滤波&CSRT算法 目标跟踪实现
本次课题实现目标跟踪一共用到了三个算法,分别是Camshift.Kalman.CSRT,基于Python语言的Tkinter模块实现GUI与接口设计,项目一共包含三个文件: main.py: # co ...
- 目标跟踪之Lukas-Kanade光流法
转载自:http://blog.csdn.net/u014568921/article/details/46638557 光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于19 ...
- 【目标跟踪】相关滤波算法之MOSSE
简要 2010年David S. Bolme等人在CVPR上发表了<Visual Object Tracking using Adaptive Correlation Filters>一文 ...
- 目标跟踪之Lukas-Kanade光流法(转)
光流是图像亮度的运动信息描述.光流法计算最初是由Horn和Schunck于1981年提出的,创造性地将二维速度场与灰度相联系,引入光流约束方程,得到光流计算的基本算法.光流计算基于物体移动的光学特性提 ...
随机推荐
- SetROP2
一个Windows API SetROP2(int nDrawMode)的使用 该函数的主要的作用是根据nDrawMode设置的方式重新设定绘图的方式,下面就不同的nDrawMode值具体解释绘图模式 ...
- WCF大文件传输【转】
http://www.cnblogs.com/happygx/archive/2013/10/29/3393973.html WCF大文件传输 WCF传输文件的时候可以设置每次文件的传输大小,如果是小 ...
- Swoole 多协议 多端口 的应用
目录 概述 网络通信协议设计 多端口监听的使用 小结 概述 这是关于 Swoole 学习的第五篇文章:Swoole 多协议 多端口 的应用. 第四篇:Swoole HTTP 的应用 第三篇:Swool ...
- 获得用户IP、城市、国家等信息的api接口
1 这个信息比较多 https://api.ipdata.co/?api-key=test <script> $.get("https://api.ipdata.co?api-k ...
- python-根据URL地址下载文件
博主个人网站:https://chenzhen.online 使用Python中提供的urllib.request下载网上的文件 #coding=utf-8 """ 目标 ...
- surface shader相关参数,命令
https://docs.unity3d.com/Manual/SL-SurfaceShaders.html 说明: 注意下surfaceshader相关开关选项,input结构体全部可用参数 goo ...
- 原生js 的ajax封装
/** * 封装ajax函数(包括跨域) * @method ajax * @param option :{type:"post" or "get" 请求方式, ...
- dual 视图模拟 Oracle
CREATE OR REPLACE VIEW dual ASSELECT NULL::"unknown"WHERE 1 = 1;
- Nacos深入浅出(五)
四中标色的代码 result = ConfigService.dump(dataId, group, tenant, cf.getContent(), lastModified); 我们看下这个方法 ...
- Linux systemd 常用命令
系统管理 systemctl 显示系统状态: $ systemctl status 立即激活单元: # systemctl start [单元] 立即停止单元: # systemctl stop [单 ...