IO中同步异步,阻塞与非阻塞 -- 原理篇
再补一篇高手写的理论分析,便于更深刻理解
转自:http://blog.csdn.net/historyasamirror/article/details/5778378
=============================================================
同步(synchronous) IO和异步(asynchronous) IO,阻塞(blocking) IO和非阻塞(non-blocking)IO分别是什么,到底有什么区别?这个问题其实不同的人给出的答案都可能不同,比如wiki,就认为 asynchronous IO和non-blocking IO是一个东西。这其实是因为不同的人的知识背景不同,并且在讨论这个问题的时候上下文(context)也不相同。所以,为了更好的回答这个问题,我先 限定一下本文的上下文。
本文讨论的背景是Linux环境下的network IO。
本文最重要的参考文献是Richard Stevens的“UNIX Network Programming Volume 1, Third Edition: The Sockets Networking
”,6.2节“I/O Models
”,Stevens在这节中详细说明了各种IO的特点和区别,如果英文够好的话,推荐直接阅读。Stevens的文风是有名的深入浅出,所以不用担心看不懂。本文中的流程图也是截取自参考文献。
Stevens在文章中一共比较了五种IO Model:
blocking IO
nonblocking IO
IO multiplexing
signal driven IO
asynchronous IO
由于signal driven IO在实际中并不常用,所以我这只提及剩下的四种IO Model。
再说一下IO发生时涉及的对象和步骤。
对于一个network IO (这里我们以read举例),它会涉及到两个系统对象,一个是调用这个IO的process (or thread),另一个就是系统内核(kernel)。当一个read操作发生时,它会经历两个阶段:
1 等待数据准备 (Waiting for the data to be ready)
2 将数据从内核拷贝到进程中 (Copying the data from the kernel to the process)
记住这两点很重要,因为这些IO Model的区别就是在两个阶段上各有不同的情况。
blocking IO
在linux中,默认情况下所有的socket都是blocking,一个典型的读操作流程大概是这样:
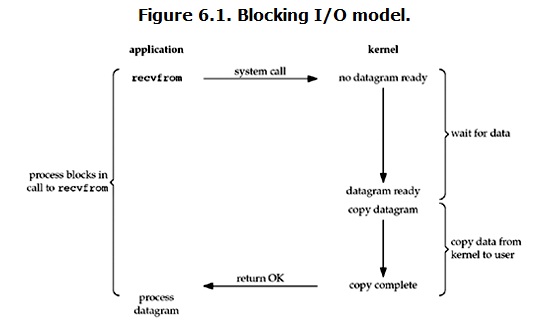
当用户进程调用了recvfrom这个系统调用,kernel就开始了IO的第一个阶段:准备数据。对于network
io来说,很多时候数据在一开始还没有到达(比如,还没有收到一个完整的UDP包),这个时候kernel就要等待足够的数据到来。而在用户进程这边,整
个进程会被阻塞。当kernel一直等到数据准备好了,它就会将数据从kernel中拷贝到用户内存,然后kernel返回结果,用户进程才解除
block的状态,重新运行起来。
所以,blocking IO的特点就是在IO执行的两个阶段都被block了。
non-blocking IO
linux下,可以通过设置socket使其变为non-blocking。当对一个non-blocking socket执行读操作时,流程是这个样子:
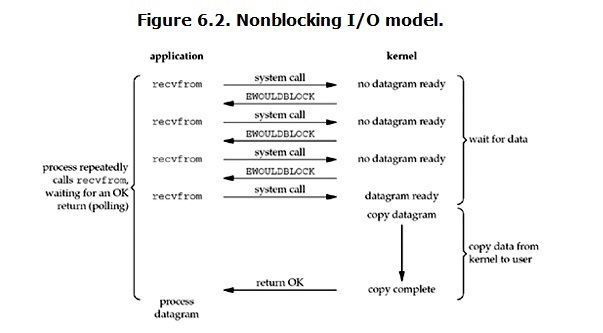
从图中可以看出,当用户进程发出read操作时,如果kernel中的数据还没有准备好,那么它并不会block用户进程,而是立刻返回一个
error。从用户进程角度讲
,它发起一个read操作后,并不需要等待,而是马上就得到了一个结果。用户进程判断结果是一个error时,它就知道数据还没有准备好,于是它可以再次
发送read操作。一旦kernel中的数据准备好了,并且又再次收到了用户进程的system
call,那么它马上就将数据拷贝到了用户内存,然后返回。
所以,用户进程其实是需要不断的主动询问kernel数据好了没有。
IO multiplexing
IO
multiplexing这个词可能有点陌生,但是如果我说select,epoll,大概就都能明白了。有些地方也称这种IO方式为event
driven
IO。我们都知道,select/epoll的好处就在于单个process就可以同时处理多个网络连接的IO。它的基本原理就是select
/epoll这个function会不断的轮询所负责的所有socket,当某个socket有数据到达了,就通知用户进程。它的流程如图:
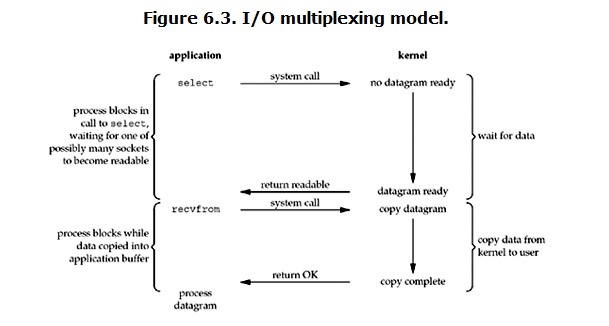
当用户进程调用了select,那么整个进程会被block,而同时,kernel会“监视”所有select负责的socket,当任何一个
socket中的数据准备好了,select就会返回。这个时候用户进程再调用read操作,将数据从kernel拷贝到用户进程。
这个图和blocking IO的图其实并没有太大的不同,事实上,还更差一些。因为这里需要使用两个system call (select 和
recvfrom),而blocking IO只调用了一个system call
(recvfrom)。但是,用select的优势在于它可以同时处理多个connection。(多说一句。所以,如果处理的连接数不是很高的话,使用
select/epoll的web server不一定比使用multi-threading + blocking IO的web
server性能更好,可能延迟还更大。select/epoll的优势并不是对于单个连接能处理得更快,而是在于能处理更多的连接。)
在IO multiplexing
Model中,实际中,对于每一个socket,一般都设置成为non-blocking,但是,如上图所示,整个用户的process其实是一直被
block的。只不过process是被select这个函数block,而不是被socket IO给block。
Asynchronous I/O
linux下的asynchronous IO其实用得很少。先看一下它的流程:
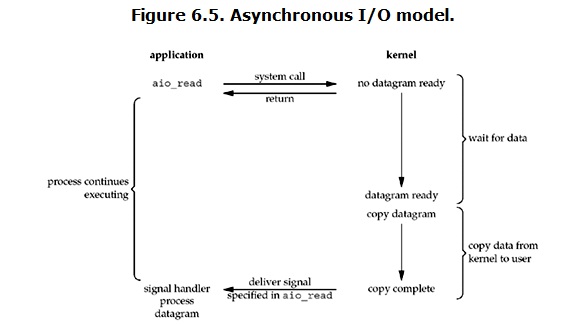
用户进程发起read操作之后,立刻就可以开始去做其它的事。而另一方面,从kernel的角度,当它受到一个asynchronous
read之后,首先它会立刻返回,所以不会对用户进程产生任何block。然后,kernel会等待数据准备完成,然后将数据拷贝到用户内存,当这一切都
完成之后,kernel会给用户进程发送一个signal,告诉它read操作完成了。
到目前为止,已经将四个IO Model都介绍完了。现在回过头来回答最初的那几个问题:blocking和non-blocking的区别在哪,synchronous IO和asynchronous IO的区别在哪。
先回答最简单的这个:blocking vs non-blocking。前面的介绍中其实已经很明确的说明了这两者的区别。调用blocking
IO会一直block住对应的进程直到操作完成,而non-blocking IO在kernel还准备数据的情况下会立刻返回。
在说明synchronous IO和asynchronous IO的区别之前,需要先给出两者的定义。Stevens给出的定义(其实是POSIX的定义)是这样子的:
A synchronous I/O operation causes the requesting process to be blocked until that I/O operation
completes;
An asynchronous I/O operation does not cause the requesting process to be blocked;
两者的区别就在于synchronous IO做”IO operation”的时候会将process阻塞。按照这个定义,之前所述的blocking
IO,non-blocking IO,IO multiplexing都属于synchronous IO。有人可能会说,non-blocking
IO并没有被block啊。这里有个非常“狡猾”的地方,定义中所指的”IO
operation”是指真实的IO操作,就是例子中的recvfrom这个system call。non-blocking
IO在执行recvfrom这个system
call的时候,如果kernel的数据没有准备好,这时候不会block进程。但是,当kernel中数据准备好的时候,recvfrom会将数据从
kernel拷贝到用户内存中,这个时候进程是被block了,在这段时间内,进程是被block的。而asynchronous
IO则不一样,当进程发起IO
操作之后,就直接返回再也不理睬了,直到kernel发送一个信号,告诉进程说IO完成。在这整个过程中,进程完全没有被block。
各个IO Model的比较如图所示:

经过上面的介绍,会发现non-blocking IO和asynchronous IO的区别还是很明显的。在non-blocking
IO中,虽然进程大部分时间都不会被block,但是它仍然要求进程去主动的check,并且当数据准备完成以后,也需要进程主动的再次调用
recvfrom来将数据拷贝到用户内存。而asynchronous
IO则完全不同。它就像是用户进程将整个IO操作交给了他人(kernel)完成,然后他人做完后发信号通知。在此期间,用户进程不需要去检查IO操作的
状态,也不需要主动的去拷贝数据。
最后,再举几个不是很恰当的例子来说明这四个IO Model:
有A,B,C,D四个人在钓鱼:
A用的是最老式的鱼竿,所以呢,得一直守着,等到鱼上钩了再拉杆;
B的鱼竿有个功能,能够显示是否有鱼上钩,所以呢,B就和旁边的MM聊天,隔会再看看有没有鱼上钩,有的话就迅速拉杆;
C用的鱼竿和B差不多,但他想了一个好办法,就是同时放好几根鱼竿,然后守在旁边,一旦有显示说鱼上钩了,它就将对应的鱼竿拉起来;
D是个有钱人,干脆雇了一个人帮他钓鱼,一旦那个人把鱼钓上来了,就给D发个短信。
IO中同步异步,阻塞与非阻塞 -- 原理篇的更多相关文章
- IO中同步异步,阻塞与非阻塞 -- 通俗篇
一.同步与异步 同步/异步, 它们是消息的通知机制 1. 概念解释 A. 同步 所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回. 按照这个定义,其实绝大多数函数都是同步调用(例 ...
- IO中同步、异步与阻塞、非阻塞的区别
一.同步与异步同步/异步, 它们是消息的通知机制 1. 概念解释A. 同步所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回. 按照这个定义,其实绝大多数函数都是同步调用(例如si ...
- IO中同步、异步与阻塞、非阻塞的区别(转)
转自:http://blog.chinaunix.net/uid-26000296-id-3754118.html 一.同步与异步同步/异步, 它们是消息的通知机制 1. 概念解释A. 同步所谓同步, ...
- Linux中同步与异步、阻塞与非阻塞概念以及五种IO模型
1.概念剖析 相信很多从事linux后台开发工作的都接触过同步&异步.阻塞&非阻塞这样的概念,也相信都曾经产生过误解,比如认为同步就是阻塞.异步就是非阻塞,下面我们先剖析下这几个概念分 ...
- 谈IO中的阻塞和非阻塞,同步和异步及三种IO模型
什么是同步和异步? 烧水,我们都是通过热水壶来烧水的.在很久之前,科技还没有这么发达的时候,如果我们要烧水,需要把水壶放到火炉上,我们通过观察水壶内的水的沸腾程度来判断水有没有烧开.随着科技的发展,现 ...
- 简述linux同步与异步、阻塞与非阻塞概念以及五种IO模型
1.概念剖析 相信很多从事linux后台开发工作的都接触过同步&异步.阻塞&非阻塞这样的概念,也相信都曾经产生过误解,比如认为同步就是阻塞.异步就是非阻塞,下面我们先剖析下这几个概念分 ...
- 网络IO之阻塞、非阻塞、同步、异步总结
网络IO之阻塞.非阻塞.同步.异步总结 1.前言 在网络编程中,阻塞.非阻塞.同步.异步经常被提到.unix网络编程第一卷第六章专门讨论五种不同的IO模型,Stevens讲的非常详细,我记得去年看第一 ...
- IO - 同步,异步,阻塞,非阻塞 (亡羊补牢篇)
IO - 同步,异步,阻塞,非阻塞 (亡羊补牢篇) 当你发现自己最受欢迎的一篇blog其实大错特错时,这绝对不是一件让人愉悦的事. <IO - 同步,异步,阻塞,非阻塞 >是我在开始学习e ...
- IO同步、异步与阻塞、非阻塞
一.同步与异步同步/异步, 它们是消息的通知机制 1. 概念解释A. 同步所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回. 按照这个定义,其实绝大多数函数都是同步调用(例如si ...
随机推荐
- Netcat基础使用
netcat命令选项 本文参考文章链接 本文参考文章链接1 本文参考文章链接2 本文参考文章链接3 常用命令选项 ## 网络模式和代理相关 -l 监听,作服务器.不填时作客户端. -u UDP模式.不 ...
- CSharp使用Thrift作为RPC框架入门(一)
前言 本文将介绍由 Facebook 开发的远程服务调用框架 Apache Thrift,它采用接口描述语言定义并创建服务,支持可扩展的跨语言服务开发,所包含的代码生成引擎可以在多种语言中,如 C++ ...
- .NET 开源免费图表组件库,Winform,WPF 通用
大家好, 我是等天黑, 今天给大家介绍一个功能完善, 性能强悍的图表组件库 ScottPlot, 当我第一次在 github 上看到这个库, 我看不懂,但我大受震撼, 这么好的项目当然要分享出来了. ...
- git添加新工程
git init git remote add origin 码云路径 git pull origin master 代码拉本地后 git add . git commit -m '新添加的文件内容描 ...
- CSS-sprit 雪碧图
CSS-sprit 雪碧图 可以将 多个小图片统一保存到一个大图片中,然后通过调整background-position来显示响应的图片 这样图片会同时加载到网页中 就可以避免出现闪烁 ...
- Qt Creator 源码学习笔记03,大型项目如何管理工程
阅读本文大概需要 6 分钟 一个项目随着功能开发越来越多,项目必然越来越大,工程管理成本也越来越高,后期维护成本更高.如何更好的组织管理工程,是非常重要的 今天我们来学习下 Qt Creator 是如 ...
- [yLOI2018] 锦鲤抄
先思考图上是\(tag\)的特殊情况. 考虑我们按拓扑序反过来操作,就可以得到我们任意想要的顺序. 那么我们把所有的图都缩点操作,那么我们只需要考虑一个联通分量里就行了. 一个联通分量最后只会剩下一个 ...
- Codeforces 286E - Ladies' Shop(FFT)
Codeforces 题面传送门 & 洛谷题面传送门 好久没刷过 FFT/NTT 的题了,写篇题解罢( 首先考虑什么样的集合 \(T\) 符合条件.我们考察一个 \(x\in S\),根据题意 ...
- HDU 6987 - Cycle Binary(找性质+杜教筛)
题面传送门 首先 mol 一发现场 AC 的 csy 神仙 为什么这题现场这么多人过啊啊啊啊啊啊 继续搬运官方题解( 首先对于题目中的 \(k,P\),我们有若存在字符串 \(k,P,P'\) 满 ...
- Atcoder Regular Contest 072 C - Alice in linear land(思维题)
Atcoder 题面传送门 & 洛谷题面传送门 首先求出 \(s_i\) 表示经过 \(i\) 次操作后机器人会位于什么位置,显然 \(s_0=D\),\(s_i=\min(s_{i-1},| ...