改进初学者的PID-微分冲击
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助。作者Brett Beauregard的原文网址:http://brettbeauregard.com/blog/2011/04/improving-the-beginner%E2%80%99s-pid-derivative-kick/
1、问题
这个修改将稍微调整微分项。其目标是消除一种被称为“微分冲击”的现象。

上图说明了问题。由于error = Setpoint-Input,设定值的任何变化都会导致偏差的瞬时变化。这种变化的导数是无穷大(实际上,由于dt不是0,它只是一个非常大的数字。)这个数字被输入PID方程,这导致输出中出现不希望的峰值。幸运的是,有一种简单的方法可以摆脱这种情况。
2、解决方案
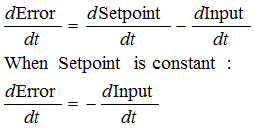
事实证明,当设定值发生变化时,偏差的导数等于输入的负导数。这最终成为一个完美的解决方案。我们减去(Kd *输入的导数)而不是添加(Kd *偏差的导数)。这被称为使用“基于测量的微分”。
3、代码
/*working variables*/
unsigned long lastTime;
double Input,Output,Setpoint;
double errSum,lastInput;
double kp,ki,kd;
int SampleTime = ; //1 sec
void Compute()
{
unsigned long now = millis();
int timeChange = (now - lastTime);
if(timeChange>=SampleTime)
{
/*Compute all the working error variables*/
double error = Setpoint - Input;
errSum += error;
double dInput = (Input - lastInput); /*Compute PID Output*/
Output = kp * error + ki * errSum - kd * dInput; /*Remember some variables for next time*/
lastInput = Input;
lastTime = now;
}
} void SetTunings(double Kp,double Ki,double Kd)
{
double SampleTimeInSec = ((double)SampleTime)/;
kp = Kp;
ki = Ki * SampleTimeInSec;
kd = Kd / SampleTimeInSec;
} void SetSampleTime(int NewSampleTime)
{
if (NewSampleTime > )
{
double ratio = (double)NewSampleTime
/ (double)SampleTime;
ki *= ratio;
kd /= ratio;
SampleTime = (unsigned long)NewSampleTime;
}
}
这里的修改非常简单。我们用-dInput替换+ dError。我们现在需要记住lastInput,而不是记住lastError
4、结果
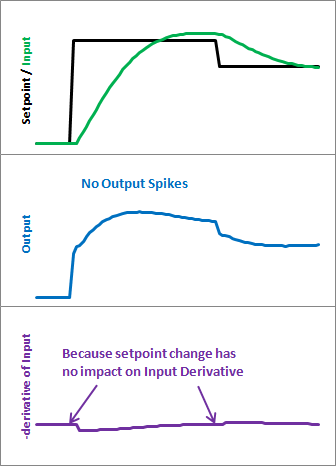
以下是这些修改对我们的影响。请注意,输入看起来仍然相同。所以我们得到相同的性能,但是每次设定点改变时我们都不会发出巨大的输出尖峰。
这也许没什么大不了的。这完全取决于应用程序对输出峰值有多敏感。但在我看来,没有冲击就不需要做更多的工作,所以为什么不把事情做好呢?
欢迎关注:

改进初学者的PID-微分冲击的更多相关文章
- 改进初学者的PID-介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-采样时间
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-正反作用
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-修改整定参数
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-积分饱和
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例介绍
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-初始化
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-测量的比例编码
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
- 改进初学者的PID-手自动切换
最近看到了Brett Beauregard发表的有关PID的系列文章,感觉对于理解PID算法很有帮助,于是将系列文章翻译过来!在自我提高的过程中,也希望对同道中人有所帮助.作者Brett Beaure ...
随机推荐
- ArrayList && LinkList
1.ArrayList是实现了基于动态数组的数据结构,LinkedList基于链表的数据结构. 2.对于随机访问get和set,ArrayList觉得优于LinkedList,因为LinkedList ...
- MySQL 优化之EXPLAIN详解(执行计划)
学习MySQL时我们都知道索引对于一个SQL的优化很重要,而EXPLAIN关键字在分析是否正确以及高效的增加了索引时起到关键性的作用. 这篇文章显示了如何调用“EXPLAIN”来获取关于查询执行计划的 ...
- hello world 程序的生成过程
一个c / c ++文件需要经过预先(预处理),编译(编译),编译(汇编)和链接(链接)等四步,才能生成可执行程序. 在日常编译中,通常“编译”统称这四步: gcc -c xxx .s:汇编 gcc ...
- 013——MATLAB硬件支持包离线下载
(一)参考文献:https://blog.csdn.net/hyperorbit/article/details/88095384 (二)去下列网址下载离线包下载工具:https://ww2.math ...
- How To Set The Hostname On Ubuntu Or Debian?
$ sudo hostnamectl set-hostname your-hostname $ sudo vim /etc/hosts Open the hosts file and add the ...
- 数据库三大范式(1NF,2NF,3NF)及ER图
数据库三大范式(1NF,2NF,3NF)及ER图 百度官方解释: 设计关系数据库时,遵从不同的规范要求,设计出合理的关系型数据库,这些不同的规范要求被称为不同的范式,各种范式呈递次规范,越高的范式数据 ...
- [C++]线程池 与 [Go] mapreduce
线程池 ref: https://github.com/progschj/ThreadPool/blob/master/ThreadPool.h ref: https://www.jianshu.co ...
- 32、reduceByKey和groupByKey对比
一.groupByKey 1.图解 val counts = pairs.groupByKey().map(wordCounts => (wordCounts._1, wordCounts._2 ...
- nodejs新工具-cypress和testcofe的崛起
今天咨询一个自动化 工具问题,偶然间有人提起了这个可能以后会很火的工具,在此找到一篇很好的参考文章 记录并为以后做准备 cypress和testcofe https://www.jianshu.com ...
- CSS3字体大小rem属性用法
PX为单位 在Web页面初期制作中,我们都是使用“px”来设置我们的文本,因为他比较精确和固定. 只要页面某元素设置了px字体大小,其子元素/子孙元素未设置字体大小或设置的字体大小css优先级没父元素 ...