(转载)Universal Correspondence Network
转载自:Chris Choy's blog
Universal Correspondence Network
In this post, we will give a very high-level overview of the paper in layman’s terms. I’ve received some questions regarding what the Universal Correspondence Network (UCN) is and the limitations of it. This post will answer some of the questions and hopefully facilitate research on derivatives applications of correspondences.
Patch Similarity
Measuring the similarity of image patches is a basic element of high level operations, such as 3D reconstruction, tracking, registration, etc. The most common and widely used patch similarity is probably “geometric similarity”. In the geometric similarity, we are interested in finding image patches from two different cameras of the same 3D point.
For instance, in stereo vision, we are observing a scene from two different cameras. Since the cameras are placed a certain distance apart, images from two cameras give us different observations of the same scene. We are interested in finding image patches from respective viewpoints that correspond to the same 3D point in the scene.
Another type of similarity is “semantic correspondence”. As the name suggests, in this problem, we are interested in finding the same semantic parts. For instance a left paw of a dog and a left paw of a cat are semantically, and functionally equivalent. In the semantic similarity, we are interested in finding image patches of the same semantic object.
Measuring Patch Similarity
Traditionally, measuring similarity is done by measuring the distance of features extracted from corresponding image patches. However, such features require a lot of hand design and heuristics which results in sub-optimal performance. After the series of successes of CNNs on replacing a lot of hand-designed steps in Computer Vision applications, CNN-base similarity measures have been introduced as well.
In CNN base patch similarity measure, a Convolutional Neural Network takes two image patches as inputs and generates a score that measures the likelihood of the patch similarity. However, since the network has to take both patches, the time complexity of the comparison is O(N2)O(N2) where NN is the number of patches.
Instead, some methods cache the CNN outputs for each patch and only use Fully Connected layer feed forward passes O(N2)O(N2) times. Still, the neural network feed forward passes are expensive compare to simple distance operations.
Another type of CNN uses intermediate FC outputs as surrogate features, but metric operations (distance) on this space is not defined. In another word, the target task of such neural networks is based on metric operation (distance), but the neural network does not know the concept when it is trained.
Universal Correspondence Network
To improve all of points mentioned in the previous section, we propose incorporating three concepts into a neural network.
- Deep Metric Learning for Patch Similarity
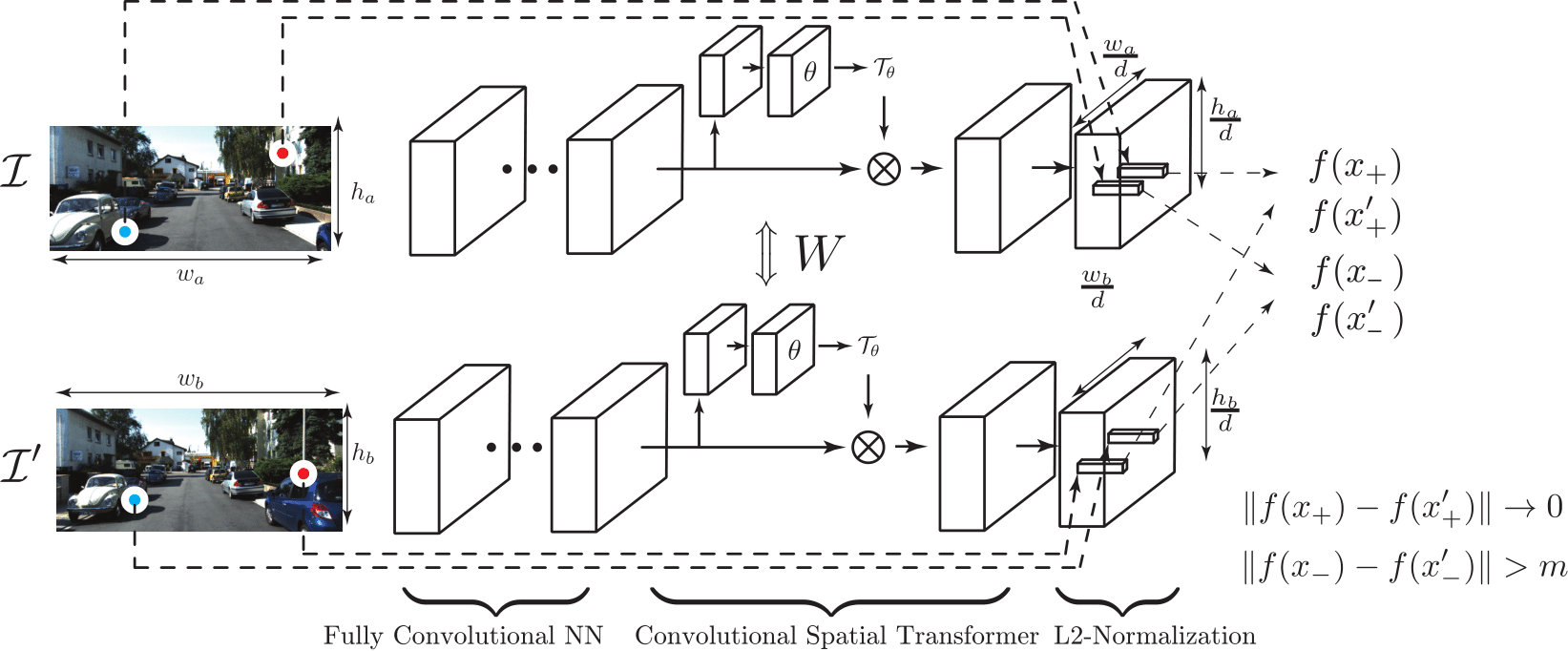
- Fully Convolutional Feature Extraction
- Convolutional Spatial Transformer
Deep Metric Learning for Patch Similarity
To minimize the number of CNN feed forward passes, many researchers introduced various techniques. In this paper, we propose using deep metric learning for patch similarity. Metric Learning is a type of learning algorithm that allows the ML model to form a metric space where metric operations are interpretable (i.e. distance). In essence, metric learning starts from a set of constraints that forces similar objects to be closer to each other and dissimilar objects to be at least a margin apart. Since the distance operations are encoded in the learning, using distance during testing (target task) yields meaningful results.
(Disclaimer) During the review process, Li et al.1 independently proposed combining metric learning with a neural network for patch similarity. However, the network is geared toward reconstruction framework and uses patch-wise feature extraction, whereas the UCN uses Fully Convolutional feature extraction.
Fully Convolutional Feature Extraction
Unlike previous approaches where CNNs only takes a pair of fixed-sized patches, we propose a fully convolutional neural network to speed up the feature extraction. Advantage of using a fully convolutional neural network is that the network can reuse the computations for overlapping image patches (Long et al.2).
For example, if we extract image patches and use a patch-based CNN, even if there is an overlap among patches, we have to compute all activations again from scratch. Whereas if we use a fully convolutional neural network, we can reuse computation for all overlapping regions and thus can speed up computation.
However, this may leads to fixed fovea size and rotation which can be fixed by incorporating the spatial transformer network (next section).
Convolutional Spatial Transformer Layer
One of the most successful hand-designed features in Computer Vision is probably the SIFT feature (D. Lowe3). Though the feature itself is based on pooling and aggregation of simple edge strengths, the way the feature is extracted is also a part of the feature and affects the performance greatly.
The extraction process tries to normalize features so that the viewpoint does not affect the feature too much. This process is the patch normalization. Specifically, given a strong gradient direction in an image patch, the feature find the optimal rotation as well as the scale and then computes features using the right coordinate system using the optimal rotation and scale. We implement the same idea in a neural network by adopting the Spatial Transformer Network into the UCN (Jaderberg et al.4). The UCN, however, is fully convolutional and the features are dense. For this, we propose the Convolutional Spatial Transformer that applies independent transformation to each and every feature.
What UCN can and cannot do
We designed a network for basic feature extraction and basic feature extraction only. This is not a replacement for high-level filtering processes that use extra supervision/inputs such as Epipolar geometry. Rather, we provide a base network for future research and thus the base network should not be confused with a full blown framework for a specific application.
One of the questions that I got at NIPS is why we did not compare with stereo vision. This question might have arisen because we used stereo benchmarks to measure the performance of the raw features for geometric correspondence task. However, as mentioned before, the raw feature does not use extra inputs and is not equivalent to a full system that makes use of extra inputs and constraints specific for stereo vision: Epipolar Line search, which significantly reduces the search space from an entire image to a line, and post processing filtering stages. More detailed explanation is provided in the following section.
Stereo Vision
For the baseline comparisons, we did not use full systems that make use of extra inputs: camera intrinsic and extrinsic parameters. If you remember how painful the cameras calibrationl was when you took a Computer Vision class, you might see that camera extrinsic parameters and intrinsic parameters are strong extra inputs. Further, such extra inputs allow you to drastically reduce the search space for geometric correspondence.
Such constraint is known as the Epipolar constraint and is a powerful constraint that comes at a price. Since our framework is not a specialized for a stereo vision, we did not compare with systems that make use of this extra input/supervision.
Instead, we use all latest hand-designed features, FC layer features, and deep matching5 since all of those do not use extra camera parameters. In this paer, we focus only on the quality of the features that can be used for more complex systems.
In addition, in UCN, to show the quality of the feature, we simply used the most stupid way to find the correspondence: nearest neighbor on the entire images, which is very inefficient, but shows the quality of the raw features. To be able to compare it with the stereo vision systems, extra constraints (Epipolar geometry + CRF filtering) should be incorporated into both training and testing.
Conclusion
We propose an efficient feature learning method for various correspondence problems. We minimized the number of feed forward passes, incorporated metric space into a neural network, and proposed a convolutional spatial transformer to mimic behavior of one of the most successful hand designed features. However, this is not a replacement for the more complex system. Rather, this is a novel way to generate base features for a complex system that require correspondences as an input. I hope this blog post had resolved some of the questions regarding the UCN and facilitated future research.
Additional Resources
References
Li et al. Learned Invariant Feature Transform, 2016 ↩
Long et al. Fully Convolutional Neural Network for Semantic Segmentation, 2014 ↩
D. Lowe, Distinctive Image Features from Scale Invariant Keypoints, 2004 ↩
Jaderberg et al., Spatial Transformer Networks, 2015 ↩
Revaud et al., Deep Matching, 2013 ↩
(转载)Universal Correspondence Network的更多相关文章
- Direct Shot Correspondence Matching
一篇BMVC18的论文,关于semantic keypoints matching.dense matching的工作,感觉比纯patch matching有意思,记录一下. 1. 摘要 提出一种针对 ...
- SuperPoint: Self-Supervised Interest Point Detection and Description 论文笔记
Introduction 这篇文章设计了一种自监督网络框架,能够同时提取特征点的位置以及描述子.相比于patch-based方法,本文提出的算法能够在原始图像提取到像素级精度的特征点的位置及其描述子. ...
- RNN 入门教程 Part 4 – 实现 RNN-LSTM 和 GRU 模型
转载 - Recurrent Neural Network Tutorial, Part 4 – Implementing a GRU/LSTM RNN with Python and Theano ...
- LR: GLU-Net: Global-Local Universal Network for Dense Flow and Correspondences
Abstract 在图像中简历稠密匹配是很重要的任务, 包括 几何匹配,光流,语义匹配. 但是这些应用有很大的挑战: 大的平移, 像素精度, 外观变化: 当前是用特定的网络架构来解决一个单一问题. 我 ...
- 转载:Network In Network学习笔记
转载原文1:http://blog.csdn.net/hjimce/article/details/50458190 转载原文2:http://blog.csdn.net/mounty_fsc/art ...
- 【转载】 卷积神经网络(Convolutional Neural Network,CNN)
作者:wuliytTaotao 出处:https://www.cnblogs.com/wuliytTaotao/ 本作品采用知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议进行许可,欢迎 ...
- Chrome DevTools — Network -- 转载
转载地址:https://segmentfault.com/a/1190000008407729 记录网络请求 默认情况下,只要DevTools在开启状态,DevTools会记录所有的网络请求,当然, ...
- 用户 NT AUTHORITY\NETWORK SERVICE 登录失败 解决方法(转载)
用户 NT AUTHORITY\NETWORK SERVICE 登录失败 解决方法 (MS SQL 2005) Windows server 2003,2008 Web.Config 配置连接sql ...
- Neural Network学习(二)Universal approximator :前向神经网络
1. 概述 前面我们已经介绍了最早的神经网络:感知机.感知机一个非常致命的缺点是由于它的线性结构,其只能做线性预测(甚至无法解决回归问题),这也是其在当时广为诟病的一个点. 虽然感知机无法解决非线性问 ...
随机推荐
- MySQL/MariaDB数据库的查询缓存优化
MySQL/MariaDB数据库的查询缓存优化 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.MySQL架构 Connectors(MySQL对外提供的交互接口,API): ...
- Selenium+TestNG+CSV数据驱动
1.工程的目录结构: # saas SAAS_UI自动化测试工程 # 一.工程的目录结构 1.saas/src是工程的入口 a.saas/src/main/java/com/saas/encapsul ...
- 微信小程序~页面跳转和路由
一个小程序拥有多个页面,我们可以通过wx.navigateTo推入一个新的页面,如图3-6所示,在首页使用2次wx.navigateTo后,页面层级会有三层,我们把这样的一个页面层级称为页面栈.
- C#使用ODP.NET(Oracle.ManagedDataAccess.dll)操作Oracle数据库
在刚接触C#的时候由于公司使用的就是Oracle数据库,那么C#怎么连接Oracle数据库就成了首要去掌握的知识点了.在那时没有ODP.NET,但visual studio却对Oralce数据库的调用 ...
- js中的全局对象
- 大数据之路week07--day07 (Hive结构设计以及Hive语法)
Hive架构流程(十分重要,结合图进行记忆理解)当客户端提交请求,它先提交到Driver,Driver拿到这个请求后,先把表明,字段名拿出来,去数据库进行元数据验证,也就是Metasore,如果有,返 ...
- CodeForces - 24D :Broken robot (DP+三对角矩阵高斯消元 随机)
pro:给定N*M的矩阵,以及初始玩家位置. 规定玩家每次会等概率的向左走,向右走,向下走,原地不动,问走到最后一行的期望.保留4位小数. sol:可以列出方程,高斯消元即可,发现是三角矩阵,O(N* ...
- HDU 6091 - Rikka with Match | 2017 Multi-University Training Contest 5
思路来自 某FXXL 不过复杂度咋算的.. /* HDU 6091 - Rikka with Match [ 树形DP ] | 2017 Multi-University Training Conte ...
- 学到了林海峰,武沛齐讲的Day50 django
http请求中产生两个核心对象: http请求:HttpRequest对象 http响应:HttpResponse对象 所在位置:django.http 5/8结束
- NVIDIA vGPU License服务器搭建详解
当配置有vGPU虚拟机发起License授权请求,授权服务器会根据License中所包含的GRID License版本,加载不同的vGPU驱动(普通驱动和专业Quodra卡驱动).目前vPC和vApp ...