Ros使用Arduino 2 使用rosserial创建一个publisher
1 启动arduino
将arduino开发板连接到电脑的usb口,在arduino IDE中进行设置。
选择Tools->Board,选择你所使用的arduino开发板的类型,所使用的arduino开发板是arduino pro min。
设置好开发板之后,继续选择Tools->Serial Port->/dev/ttyUSB1。
2 打开ROS例程
设置完成以后,在arduino IDE中,选择File->Examples->ros_lib->HelloWorld,就打开了如下的代码:
/*
* rosserial Publisher Example
* Prints "hello world!"
*/
//包含ros.h和其它可能会用到的消息的头文件。
#include <ros.h>
#include <std_msgs/String.h>
//创建了一个节点的句柄,它允许我们用来创建发布者和订阅者。这个节点的句柄同样与串口通信有关。
ros::NodeHandle nh;
//我们需要创建一个将要使用的发布者和订阅者。在上面的两行代码中,我们在话题chatter上创建了一个发布者。第二个参数是被发布者将来用于发布消息的一个消息的引用。
std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg); char hello[13] = "hello world!";
//始化节点句柄,告知那些话题将会有发布,以及订阅你想收听的话题。
void setup()
{
nh.initNode();
nh.advertise(chatter);
}
//最后在loop函数中,节点在chatter话题上发布了消息“hello world”,并且调用了ros::spinOnce(),也就是说所有ROS通信的回调都被处理。
void loop()
{
str_msg.data = hello;
chatter.publish( &str_msg );
nh.spinOnce();
delay(1000);
}
在arduino IDE中,点击upload运行程序。
运行ROS节点
打开一个窗口
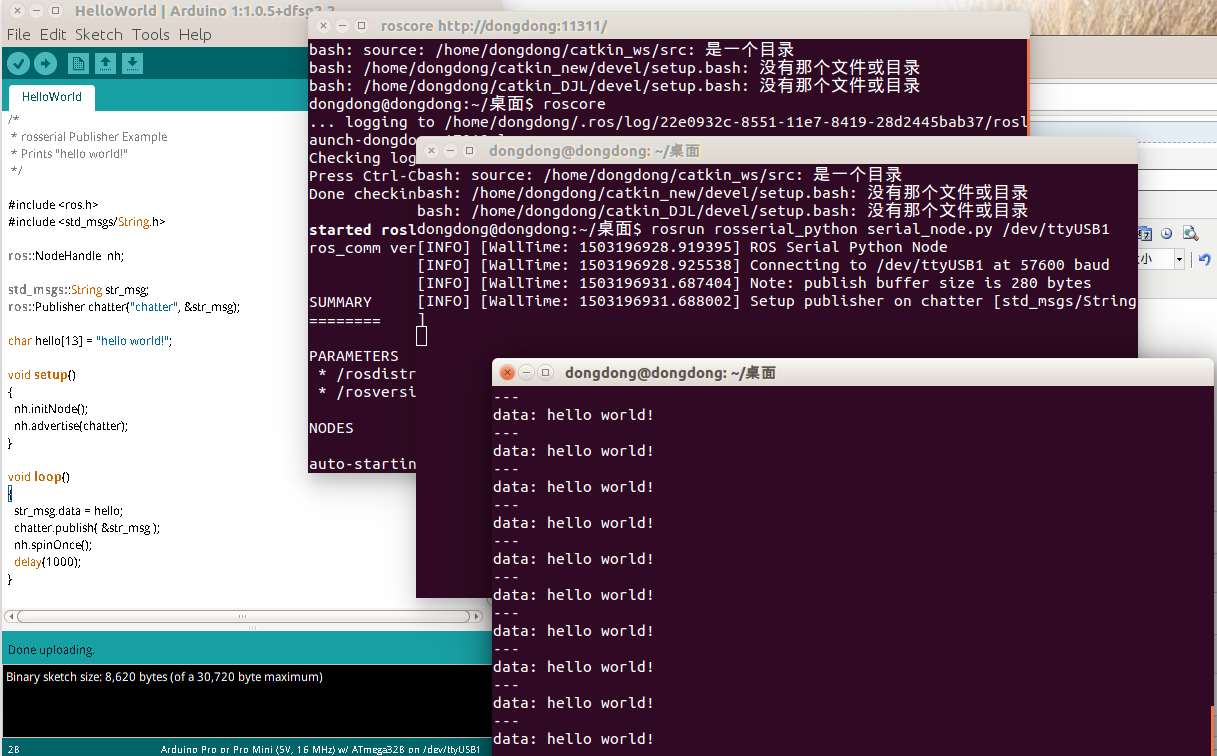
roscore
新打开一个窗口
rosrun rosserial_python serial_node.py /dev/ttyUSB1
在一个终端中输入如下命令来查看你的arduino发送的消息:
rostopic echo chatter
你可看到arduino的数据通信灯在闪,这可以说明arduino确实在发送数据给电脑。
Ros使用Arduino 2 使用rosserial创建一个publisher的更多相关文章
- Ros使用Arduino 3用rosserial创建一个subscriber
在前面的一节中,我们已经使用arduino创建了一个publisher节点,接下来将会用arduino来创建一个subscriber,接收电脑传去的信息并做出相应的反应. 1启动Arduino 将ar ...
- ROS学习记录(三)————创建一个简单的发布节点和订阅节点
暑假在家有些懈怠,不,非常懈怠- -||!良心已经发痛了,想快些补回原来的进度,但忽然发现,中断了一段时间再重新去学习,有的地方连最基本的符号都忘记了 ,这次特意弄个最最基础的,恢复一下,以前的进度. ...
- 创建一个ROS包
先前笔者不知道catkin到底是个什么东东,后来终于在官方网站上找到了答案,原来catkin是ROS的一个官方的编译构建系统,是原本的ROS的编译构建系统rosbuild的后继者.catkin的来源有 ...
- 创建一个ROS工作空间(ROS Workspace)
详细参照 http://wiki.ros.org/ROS/Tutorials/InstallingandConfiguringROSEnvironment1.mkdir -p ~/catkin_ws/ ...
- ROS笔记1 安装及创建一个ROS Package
安装 跟着官方的安装指引来就行了.安装前要先确定自己的ros版本和ubuntu版本.这二者是一一对应的. http://wiki.ros.org/ROS/Installation 主要是package ...
- ROS的初步学习--创建一个工作空间和一个程序包
快速开始 创建工作区(workspace) 工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件.编译文件和执行文件.建立工作区的方法如下: mkdir -p ~/catkin_ws/src ...
- Ros使用Arduino 1安装Arduino IDE
安装Arsuino IDE sudo apt-get install arduino 设置库文件路径 在使用ROS的库文件时,必须在代码的开头包括: #include <ros.h> 接下 ...
- ROS学习笔记(六)——创建、编译包
$ cd ~/catkin_ws #如果新开一个终端,就需要先吧ROS的工作空间配置好 $ source devel/setup.bash #工作空间的环境配置 #正式开始创建包 $ catkin_c ...
- ROS Learning-015 learning_tf(编程) 编写一个监听器程序 (Python版)
ROS Indigo learning_tf-02 编写一个 监听器 程序 (Python版) 我使用的虚拟机软件:VMware Workstation 11 使用的Ubuntu系统:Ubuntu 1 ...
随机推荐
- Django学习(6)配置静态文件
本文将详细讲述如何在Django中配置静态文件,如图片(images),JavaScript,CSS等. 我们将要实现的网页如下: 当按下按钮"Change Text"时, ...
- Spark中master与worker的进程RPC通信实现
1.构建master的actor package SparkRPC import akka.actor.{Actor, ActorSystem, Props}import com.typesafe.c ...
- 【Java并发编程】14、Thread,线程说明
线程的状态:New.Runnable.Blocked.Waiting.Timed waiting.Terminated 1. RUNNABLE,对应"就绪"和"运行&qu ...
- C++中析构函数的作用
如果构造函数打开了一个文件,最后不需要使用时文件就要被关闭.析构函数允许类自动完成类似清理工作,不必调用其他成员函数. 析构函数也是特殊的类成员函数.简单来说,析构函数与构造函数的作用正好相反,它用来 ...
- js 将内容复制到剪切板上
clipboard是将内容复制到电脑的剪切板上,要引入clipboard.js //将'data-clipboard-text' 样式添加到指定的元素上 $("#effects") ...
- 【读书笔记】iOS-对iOS应用进行模糊测试
一,模糊测试,是指通过反复向待测应用发送畸形的数据,对应用进行动态测试的过程. 二,模糊测试,也称动态分析,是一种构造非法输入并将其提供给应用,以期让应用暴露出某些安全问题的艺术和科学. 参考资料:& ...
- eclipse没有server选项解决方法
eclipse是是一个开放源代码的.基于Java的可扩展开发平台.就其本身而言,它只是一个框架和一组服务,用于通过插件组件构建开发环境. 它使用频率十分高,然而当使用它配置weblogic的时候,经常 ...
- 基于Grafana的监控数据钻取功能应用实践
互联网企业中,随着机器规模以及业务量的爆发式增长,监控数据逐渐成为一种大数据,对监控大数据的分析,包括数据采集.数据缓存.数据聚合分析.数据存储.数据展现等几个阶段.不同阶段有不同的解决方案及支撑工具 ...
- Java:构造代码块,静态代码块
本文内容: 局部代码块 构造代码块 静态代码块 补充 首发日期:2018-03-28 局部代码块: 局部代码块用于限制变量的生命周期,如果希望某些变量在某一过程之后直接失效而不希望被后面继续操作时,可 ...
- Android (checkBox)
1.使用 setOnCheckedChangeListener()方法对checkBox进行事件监听 2.重写方法 public void onCheckedChanged(CompoundButto ...