PCL—点云滤波(基于点云频率) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5010771.html
1.点云的频率
今天在阅读分割有关的文献时,惊喜的发现,点云和图像一样,有可能也存在频率的概念。但这个概念并未在文献中出现也未被使用,谨在本博文中滥用一下“高频”一词。点云表达的是三维空间中的一种信息,这种信息本身并没有一一对应的函数值。故点云本身并没有在讲诉一种变化的信号。但在抽象意义上,点云必然是在表达某种信号的,虽然没有明确的时间关系,但应该会存在某种空间关系(例如LiDar点云)。我们可以人为的指定点云空间中的一个点(例如Scan的重心或LiDar的“源”),基于此点来讨论点云在各个方向上所谓的频率。
在传统的信号处理中,高频信号一般指信号变化快,低频信号一般指信号变化缓慢。在图像处理中,高低频的概念被引申至不同方向上图像灰度的变化,傅里叶变换可以用于提取图像的周期成分滤除布纹噪声。在点云处理中,定义:点云法线向量差为点云所表达的信号。换言之,如果某处点云曲率大,则点云表达的是一个变化的信号。如果点云曲率小,则其表达的是一个不变的信号。这和我们的直观感受也是相近的,地面曲率小,它表达的信息量也小;人的五官部分曲率大,其表达了整个Scan中最大的信息量。
2.基于点云频率的滤波方法
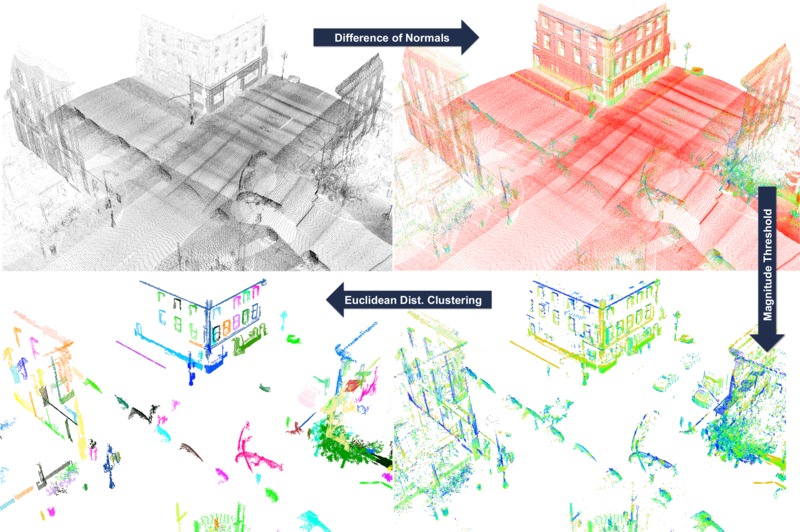
虽然点云频率之前并没有被讨论,但使用频率信息的思想已经被广泛的应用在了各个方面,最著名的莫过于DoN算法。DoN算法被作者归类于点云分割算法中,但我认为并不准确,本质上DoN只是一种前处理,应该算是一种比较先进的点云滤波算法。分割本质上还是由欧式分割算法完成的。DoN 是 Difference of Normal 的简写。算法的目的是在去除点云低频滤波,低频信息(例如建筑物墙面,地面)往往会对分割产生干扰,高频信息(例如建筑物窗框,路面障碍锥)往往尺度上很小,直接采用 基于临近信息 的滤波器会将此类信息合并至墙面或路面中。所以DoN算法利用了多尺度空间的思想,算法如下:
1.在小尺度上计算点云法线1
2.在大尺度上计算点云法线2
3.法线1-法线2
4.滤去3中值较小的点
5.欧式分割
显然,在小尺度上是可以对高频信息进行检测的,此算法可以很好的小尺度高频信息。其在大规模点云(如LiDar点云)中优势尤其明显。
3.PCL对该算法的实现
算法运行过程可用图表示为:
// Create a search tree, use KDTreee for non-organized data.
pcl::search::Search<PointXYZRGB>::Ptr tree;
if (cloud->isOrganized ())
{
tree.reset (new pcl::search::OrganizedNeighbor<PointXYZRGB> ());
}
else
{
tree.reset (new pcl::search::KdTree<PointXYZRGB> (false));
}
// Set the input pointcloud for the search tree
tree->setInputCloud (cloud);
//生成法线估计器(OMP是并行计算,忽略)
pcl::NormalEstimationOMP<PointXYZRGB, PointNormal> ne;
ne.setInputCloud (cloud);
ne.setSearchMethod (tree);
//设定法线方向(要做差,同向很重要)
ne.setViewPoint (std::numeric_limits<float>::max (), std::numeric_limits<float>::max (), std::numeric_limits<float>::max ());
//计算小尺度法线
pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale2);
ne.compute (*normals_large_scale);
//计算大尺度法线
pcl::PointCloud<PointNormal>::Ptr normals_large_scale (new pcl::PointCloud<PointNormal>);
ne.setRadiusSearch (scale2);
ne.compute (*normals_large_scale);
//生成DoN分割器
pcl::DifferenceOfNormalsEstimation<PointXYZRGB, PointNormal, PointNormal> don;
don.setInputCloud (cloud);
don.setNormalScaleLarge (normals_large_scale);
don.setNormalScaleSmall (normals_small_scale);
//计算法线差
PointCloud<PointNormal>::Ptr doncloud (new pcl::PointCloud<PointNormal>);
copyPointCloud<PointXYZRGB, PointNormal>(*cloud, *doncloud);
don.computeFeature (*doncloud);
//生成滤波条件:把法线差和阈值比
pcl::ConditionOr<PointNormal>::Ptr range_cond (
new pcl::ConditionOr<PointNormal> ()
);
range_cond->addComparison (pcl::FieldComparison<PointNormal>::ConstPtr (
new pcl::FieldComparison<PointNormal> ("curvature", pcl::ComparisonOps::GT, threshold))
);
//生成条件滤波器,输入滤波条件和点云
pcl::ConditionalRemoval<PointNormal> condrem (range_cond);
condrem.setInputCloud (doncloud);
//导出滤波结果
pcl::PointCloud<PointNormal>::Ptr doncloud_filtered (new pcl::PointCloud<PointNormal>);
condrem.filter (*doncloud_filtered);
//欧式聚类~~~(略)
PCL—点云滤波(基于点云频率) 低层次点云处理的更多相关文章
- PCL—点云分割(邻近信息) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5000147.html 分割给人最直观的影响大概就是邻居和我不一样.比如某条界线这边是中华文明,界线那边是西方文,最 ...
- PCL—点云分割(基于凹凸性) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5027269.html 1.图像分割的两条思路 场景分割时机器视觉中的重要任务,尤其对家庭机器人而言,优秀的场景分割 ...
- PCL—点云分割(超体聚类) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5013968.html 1.超体聚类——一种来自图像的分割方法 超体(supervoxel)是一种集合,集合的元素是 ...
- PCL中outofcore模块---基于核外八叉树的大规模点云的显示
写在前面 最近公众号的活动让更多的人加入交流群,尝试提问更多的我问题,群主也在积极的招募更多的小伙伴与我一起分享,能够相互促进. 这里总结群友经常问,经常提的两个问题,并给出我的回答: (1) ...
- PCL—关键点检测(Harris)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5064848.html 除去NARF这种和特征检测联系比较紧密的方法外,一般来说特征检测都会对曲率变化比较剧烈的点更 ...
- PCL—关键点检测(rangeImage)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5046479.html 关键点又称为感兴趣的点,是低层次视觉通往高层次视觉的捷径,抑或是高层次感知对低层次处理手段的 ...
- PCL—关键点检测(NARF)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5051533.html 关键点检测本质上来说,并不是一个独立的部分,它往往和特征描述联系在一起,再将特征描述和识别. ...
- PCL—点云分割(基于形态学) 低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5017428.html 1.航空测量与点云的形态学 航空测量是对地形地貌进行测量的一种高效手段.生成地形三维形貌一直 ...
- PCL—关键点检测(iss&Trajkovic)低层次点云处理
博客转载自:http://www.cnblogs.com/ironstark/p/5069311.html 关键点检测往往需要和特征提取联合在一起,关键点检测的一个重要性质就是旋转不变性,也就是说,物 ...
随机推荐
- python--匿名函数lambda
Python语言使用lambda关键字来创建匿名函数. 所谓匿名,即不再使用def语句这样标准的形式定义一个函数. lambda只是一个表达式,而不是一个代码块,函数体比def简单很多. 仅仅能在la ...
- 27 python 网络基础之网络协议
一.操作系统基础 操作系统:(Operating System,简称OS)是管理和控制计算机硬件与软件资源的计算机程序,是直接运行在“裸机”上的最基本的系统软件,任何其他软件都必须在操作系统的支持下才 ...
- rabbitmq的vhost与用户管理
当我们在创建用户时,会指定用户能访问一个虚拟机,并且该用户只能访问该虚拟机下的队列和交换机,如果没有指定,默认的是”/”;一个rabbitmq服务器上可以运行多个vhost,以便于适用不同的业务需要, ...
- JavaScript6 新语法 let 有什么优势
最近看国外的前端代码时,发现ES6的新特性已经相当普及,尤其是 let,应用非常普遍 虽然 let 的用法与 var 相同,但不管是语法语义上,还是性能上,都提升了很多,下面就从这两方面对比一下 语法 ...
- C++语言对C的增强(1)——实用性、变量检测、struct类型、C++中所有变量和函数都必须有类型、bool类型、三目运算符
1.“实用性”增强 C语言中的变量都必须在作用域开始的位置定义,C++中更强调语言的“实用性”,所有的变量都可以在需要使用时再定义. 2.变量检测加强 在C语言中,重复定义多个同名的全局变量是合法的: ...
- 生成Texture2D纹理图片
using UnityEngine;using System.Collections; public class ProceduralTexture : MonoBehaviour{ public i ...
- 转载 VC轻松解析XML文件 - CMarkup类的使用方法
VC轻松解析XML文件 - CMarkup类的使用方法http://www.cctry.com/thread-3866-1-1.html VC解析XML文件的工具有很多,CMarkup, tinyXM ...
- Oracle 常用语句SQL
查询Oracle 用户下面的所有表,表注释,行数 select t.TABLE_NAME, s.comments,t.NUM_ROWS from user_tables t, user_tab_co ...
- java代码swing编程 制作一个单选按钮的Frame
不善于思考,结果费了时间,也没有效果 下面的框框可以做出来. package com.kk; import javax.swing.JFrame; import javax.swing.JLabel; ...
- 断路器(CircuitBreaker)设计模式
断路器是电器时代的一个重要组成部分,后面总是有保险丝熔断或跳闸的断路器是安全的重要保障. 微服务最近几年成为软件架构的热门话题,其益处多多.但需要知道的是,一旦开始将单块系统进行分解,就上了分布式系统 ...