ROS-Gazebo-turtlebot3仿真
前言:Gazebo是一款强大的3D仿真器,支持机器人开发所需的机器人、传感器和环境模型,并且通过搭载的物理引擎可以得到逼真的仿真结果。即便Gazebo是一款开源仿真器,却具有高水准的仿真性能,因此在机器人工程领域中非常流行。
前提:已安装了turtlebot3软件包,如没有安装,可参考:https://www.cnblogs.com/chendeqiang/p/10227401.html
https://github.com/huchunxu/ros_exploring
一、 启动“世界”仿真图像
roslaunch turtlebot_gazebo turtlebot_world.launch
------------------------------------
显示如下:

shift+鼠标左键 可以调整视角。
注:如果启动失败,可以注销后再重新打开就可以正常显示了。
二、启动键盘控制
启动键盘控制:
roslaunch turtlebot_teleop keyboard_teleop.launch
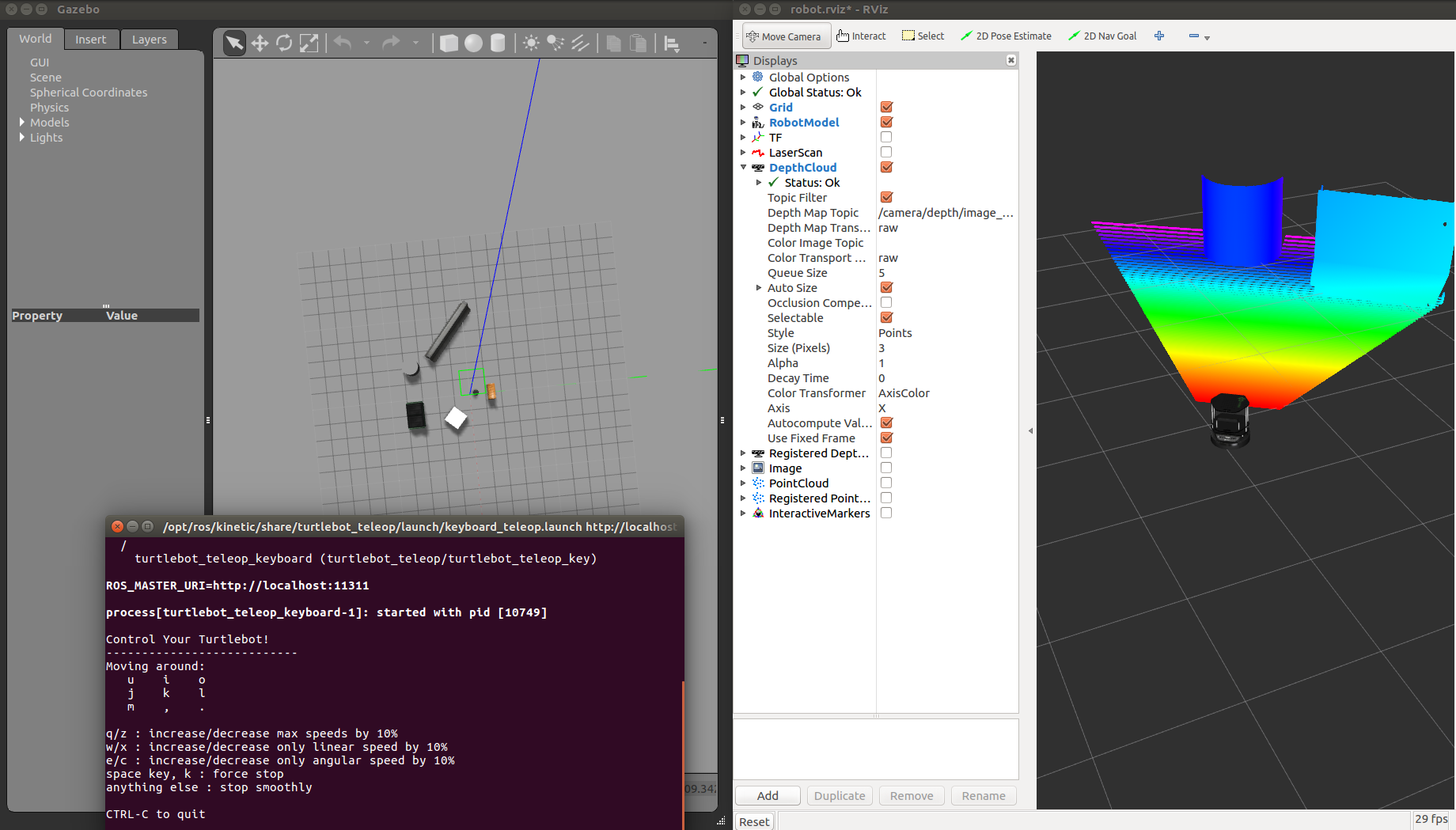
三、启动rviz查看turtlbot摄像机采集的信息
roslaunch turtlebot_rviz_launchers view_robot.launch
勾选左边的depthcloud就可以看到,记得切换一下topic。按鼠标左键可调整视角。
-----------------------------------------
显示如下:

四、最终版
左边是gazebo,右边是rviz,前端是键盘控制。
五、launch文件解析
<launch>
<!-- 设置launch文件的参数 -->
<arg name="world_name" value="$(find mrobot_gazebo)/worlds/playground.world"/>
<arg name="paused" default="false"/>
<arg name="use_sim_time" default="true"/>
<arg name="gui" default="true"/>
<arg name="headless" default="false"/>
<arg name="debug" default="false"/>
<!-- 运行gazebo仿真环境 -->
<include file="$(find gazebo_ros)/launch/empty_world.launch">
<arg name="world_name" value="$(arg world_name)" />
<arg name="debug" value="$(arg debug)" />
<arg name="gui" value="$(arg gui)" />
<arg name="paused" value="$(arg paused)"/>
<arg name="use_sim_time" value="$(arg use_sim_time)"/>
<arg name="headless" value="$(arg headless)"/>
</include>
<!-- 加载机器人模型描述参数 -->
<param name="robot_description" command="$(find xacro)/xacro --inorder '$(find mrobot_gazebo)/urdf/mrobot.urdf.xacro'" />
<!-- 运行joint_state_publisher节点,发布机器人的关节状态 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" ></node>
<!-- 运行robot_state_publisher节点,发布tf -->
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" output="screen" >
<param name="publish_frequency" type="double" value="50.0" />
</node>
<!-- 在gazebo中加载机器人模型-->
<node name="urdf_spawner" pkg="gazebo_ros" type="spawn_model" respawn="false" output="screen"
args="-urdf -model mrobot -param robot_description"/>
</launch>
launch文件主要做了两件事:
1.启动机器人的状态发布节点,同时加载带有Gazebo属性的机器人urdf模型;
2.启动Gazebo,并且将机器人模型加载到Gazebo仿真环境中。
六、运行摄像头仿真
启动仿真环境
roslaunch view_mrobot_with_camera_gazebo.launch
启动rqt
rqt_image_view
-END-
ROS-Gazebo-turtlebot3仿真的更多相关文章
- Ubuntu 18.04 + ROS Melodic + TurtleBot3仿真
1. 下载安装包 官网地址: http://wiki.ros.org/action/show/Robots/TurtleBot?action=show&redirect=TurtleBot 所 ...
- ROS(indigo)_pr2_simulator仿真(gazebo)示例
ROS(indigo)_pr2_simulator仿真(gazebo)示例 1 开启pr2仿真 ~$ roslaunch gazebo_ros empty_world.launch ~$ roslau ...
- ROS(indigo)_turtlebot仿真示例包括stage和gazebo
ROS(indigo)_turtlebot仿真示例包括stage和gazebo 现上参考网址: turtlebot:http://wiki.ros.org/Robots/TurtleBot stage ...
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 多指灵巧手MoveIt!与Gazebo联合仿真框架搭建
至于为什么叫框架,一是因为灵巧手的3维模型没有按照基本的设计要求画,正常来说,设计机器人机构之前应该设计好机构需要多少个自由度/DOF,每个自由度是旋转/revolute类型还是滑移/prismati ...
- ROS(indigo)国外开源示例包括多机器人控制等基于V-Rep和Gazebo的仿真
ROS(indigo)国外开源示例包括多机器人的V-Rep和Gazebo仿真等 1 micros_swarm_framework 使用超级经典的stage. http://wiki.ros.org/m ...
- 安卓手机与ROS通信遥控Gazebo中仿真机器人小车运动(ROS_indigo)
首先,先列出需要用到的一些文件: Gazebo中机器人模型及说明: http://wiki.ros.org/grizzly_simulator https://github.com/g/grizzly ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 2: Enable the robot
Day 2: Enable the robot Git Setting git checkout master git branch day2_enable_robot git push --set- ...
- Making my own Autonomous Robot in ROS / Gazebo, Day 1: Building the static model
Day 1: Setting up ROS: Indigo OS: Ubuntu 14.04 OS: Gazebo 7.0.0 Initialize the workspace To create t ...
- ROS机器人导航仿真(kinetic版本)
准备工作: ubuntu 16.04系统;ROS kinetic版本;ROS包turtlebot,导航包rbx1,模拟器arbotix,可视化rviz 1.安装ubuntu 16.04系统与安装ROS ...
随机推荐
- Solid Angle of A Cubemap Texel - 计算Cubemap的一个像素对应的立体角的大小
参考[http://www.rorydriscoll.com/2012/01/15/cubemap-texel-solid-angle/] 计算diffuse irradiance map或者求解sh ...
- Java入门第一季——从此投身Java??
找工作告一段落. 最后的工作呢,和java紧密相关,也是阴差阳错,不过都是软件开发,都好了,不过以后侧重点肯定是在java这边,php有机会还是一直学下去的,那么美的说~ Java开发第一季 一.简 ...
- Select, Poll,Epoll
Date: 2019-06-19 Author: Sun 1. Select select最早于1983年出现在4.2BSD中,它通过一个select()系统调用来监视多个文件描述符的数组,当se ...
- javase 继承练习
package xuexi; 父级 public class Fu { int num=0; public void eat() { System.out.println("父亲在吃饭&qu ...
- jq操作table追加td
示例 代码 <!DOCTYPE html> <html lang="en"> <head> <meta charset="UTF ...
- MySQL 单表查询多表查询
一 单表查询 表准备 create table emp( id int not null unique auto_increment, name varchar(20) not null, sex e ...
- 滚动效果--marquee的使用
1. <marquee></marquee>标签,默认从最右侧往左滚动: 2. marquee 支持的属性 (1)behavior设置滚动方式: <marquee beh ...
- ubuntu上的arm-elf-tools -20040427.sh 下载及安装问题的解决
要完成uclinux在ARM上的移植,必须有这个工具. 下载地址:http://opensrc.sec.samsung.com/download.html 这个网站上还有许多其它资源可以下载.我选择 ...
- spring data JPA使用quartz定时器的具体实现
第一步.在pom.xml中的配置 <!--quartz--> <dependency> <groupId>org.quartz-scheduler</grou ...
- ZOJ 3891 K-hash
K-hash Time Limit: 2000ms Memory Limit: 131072KB This problem will be judged on ZJU. Original ID: 38 ...