ROS-TF-监听
前言:监听第一只海龟的位置,然后让第二只海龟跟随第一只海龟。
通过监听tf,我们可以避免繁琐的旋转矩阵的计算,而直接获取我们需要的相关信息。
一、新建cpp文件
新建turtle_tf_listener.cpp文件,内容如下:
#include <ros/ros.h>
#include <tf/transform_listener.h>//监听类TransformListener 的头文件,该对象会自动订阅ROS中的tf消息,并且管理所有的变换关系数据。
#include <geometry_msgs/Twist.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv){
ros::init(argc, argv, "my_tf_listener");
ros::NodeHandle node;
//生成一只新乌龟
ros::service::waitForService("spawn");
ros::ServiceClient add_turtle =
node.serviceClient<turtlesim::Spawn>("spawn");
turtlesim::Spawn srv;
add_turtle.call(srv);
ros::Publisher turtle_vel =
node.advertise<geometry_msgs::Twist>();//定义发布者turtle_vel
tf::TransformListener listener;//新建监听对象
ros::Rate rate(10.0);
while (node.ok()){
tf::StampedTransform transform;//定义存放转换信息(平动,转动)的变量
try{
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time(), transform);//可以获得两个坐标系之间转换的关系,包括旋转与平移。转换得出的坐标是在“/turtle2”坐标系下的
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}//由于tf的会把监听的内容存放到一个缓存中,然后再读取相关的内容,而这个过程可能会有几毫秒的延迟,也就是,tf的监听器并不能监听到“现在”的变换,所以如果不使用try,catch函数会卡死。
//这个转换基于turtle1的距离和角度,用来计算turtle2的新的线速度和角速度,新的速度被发布在"turtle2/cmd_vel" 话题上,并且sim将使用它来更新turtle2的移动
geometry_msgs::Twist vel_msg;
vel_msg.angular.z = 4.0 * atan2(transform.getOrigin().y(),
transform.getOrigin().x());
vel_msg.linear.x = ) +
pow(transform.getOrigin().y(), ));
turtle_vel.publish(vel_msg);//发布话题,控制turtle2的位置。
rate.sleep();
}
;
};
总体思路是:新建监听对象listener,并将turtle1的位置信息转化成vel_msg信息,然后使用发布者turtle_vel发布出去。
二、修改launch文件
在launch文件末尾添加
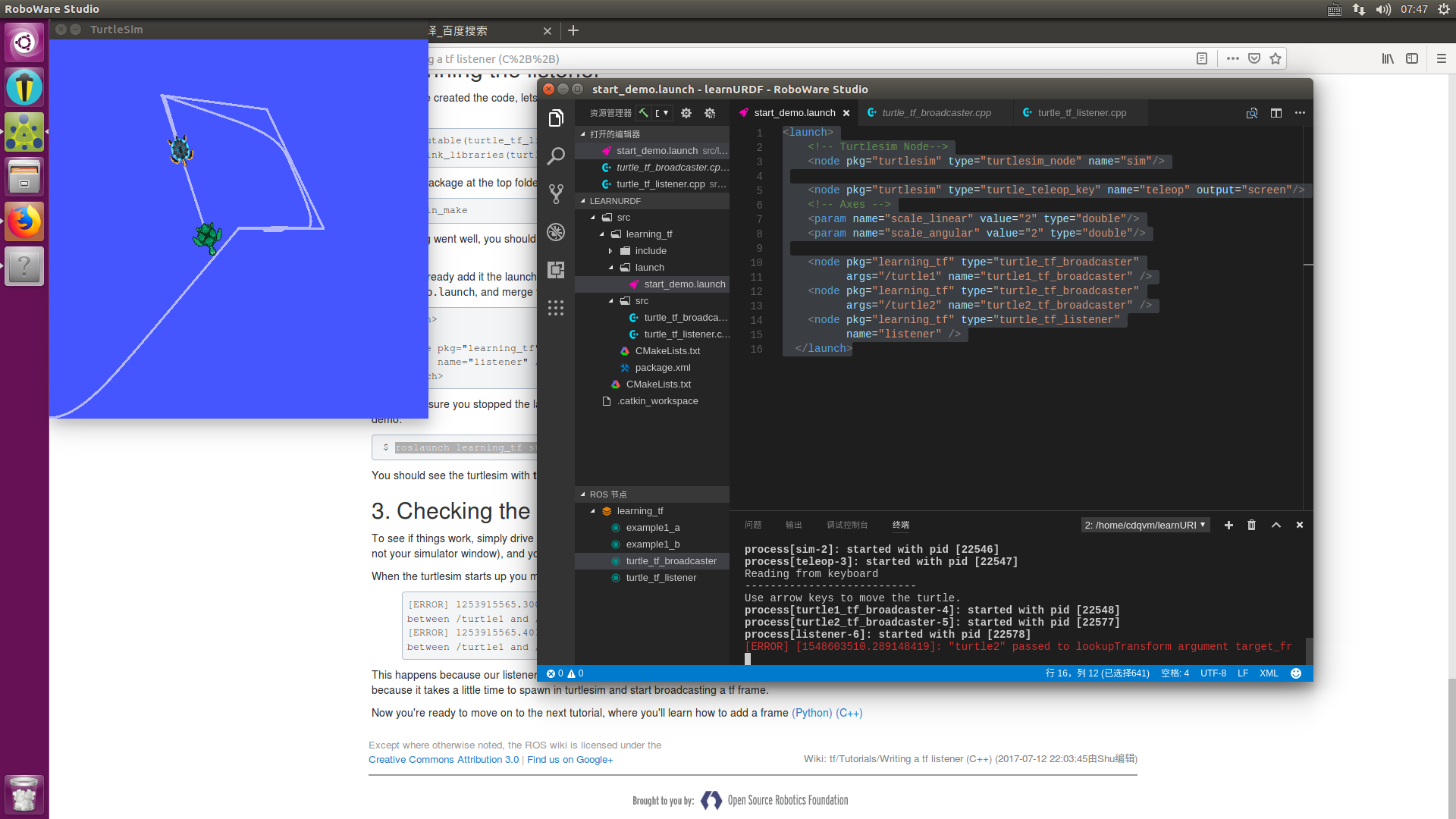
<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<!-- Axes -->
<param name="scale_linear" value="2" type="double"/>
<param name="scale_angular" value="2" type="double"/>
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle1" name="turtle1_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_broadcaster"
args="/turtle2" name="turtle2_tf_broadcaster" />
<node pkg="learning_tf" type="turtle_tf_listener"
name="listener" />
</launch>
三、运行
roslaunch learning_tf start_demo.launch
参考自:http://wiki.ros.org/tf/Tutorials/Writing%20a%20tf%20listener%20%28C%2B%2B%29
-END-
ROS-TF-监听的更多相关文章
- ROS tf监听编写
博客转载自:https://www.ncnynl.com/archives/201702/1311.html ROS与C++入门教程-tf-编写tf listener(监听) 说明: 介绍如何使用tf ...
- ROS tf
一.节点中使用(cpp,python) 1. ros wiki 提供的tutorials 2. https://blog.csdn.net/start_from_scratch/article/det ...
- ros之tf坐标系广播与监听的编程实现
创建功能包-learning_tf $ cd ~/catkin_ws/src $ catkin_create_pkg learning_tf roscpp rospy tf turtlesim 如何创 ...
- java鼠标与键盘事件监听
package cn.stat.p3.windowdemo; import java.awt.Button; import java.awt.FlowLayout; import java.awt.F ...
- java Gui编程 事件监听机制
1. GUI编程引言 以前的学习当中,我们都使用的是命令交互方式: 例如:在DOS命令行中通过javac java命令启动程序. 软件的交互的方式: 1. 命令交互方式 图书管理系统 ...
- Java基础--Java---IO流------GUI(布局)、Frame、事件监听机制、窗体事件、Action事件、鼠标事件、对话框Dialog、键盘事件、菜单
* 创建图形化界面 * 1.创建frame窗体 * 2.对窗体进行基本设置 * 比如大小.位置.布局 * 3.定义组件 * 4.将组件通过窗体的add方法添加到窗体 * 5.让窗体显 ...
- 简单读!tomcat源码(一)启动与监听
tomcat 作为知名的web容器,很棒! 本文简单了从其应用命令开始拆解,让我们对他有清晰的了解,揭开神秘的面纱!(冗长的代码流水线,给你一目了然) 话分两头: 1. tomcat是如何启动的? 2 ...
- 10.22 tcpdump:监听网络流量
[功能说明] tcpdump命令是一个截获网络数据包的包分析工具.tcpdump可以将网络中传送的数据包的“头”完全截获下来以提供分析.它支持针对网络层.协议.主机.端口等的过滤,并支持与.或.非逻辑 ...
- 焦点监听事件FocusListener
public class Demo extends JFrame { public Demo() { setBounds(100, 100, 200, 120); setDefaultCloseOpe ...
- java代码对按钮进行监听---------------打印出每次点击按钮的次数
其实,我真不会写嗯? package com.a.b; import java.awt.event.ActionEvent; import java.awt.event.ActionListener; ...
随机推荐
- java中关于数组的初始化
- ZOJ 3180 Number Game(模拟,倒推)
题目 思路: 先倒推!到最后第二步,然后: 初始状态不一定满足这个状态.所以我们要先从初始状态构造出它出发的三种状态.那这三种状态跟倒推得到的状态比较即可. #include<stdio.h&g ...
- Flask - 特殊装饰器 和 Flask工作结构模式(FBV, CBV)
目录 Flask - 特殊装饰器 和 Flask工作结构模式 @app.errorhandler() @app.before_request @app.after_request FBV和CBV Fl ...
- Thesis Viva checklist
This list gives you suggestions helpful in preparing to defend your thesis: I know my thesis thoroug ...
- android 数据存储之SQLite
使用嵌入式关系型SQLite数据库存储数据 除了可以使用文件或SharedPreferences存储数据,还可以选择使用SQLite数据库存储数据. 在Android平台上,集成了一个嵌入式关系型数据 ...
- 学习记录--让我打开另一种思路的SQL
1.显示文章.提交人和最后回复时间 select a.title,a.username,b.adddate from table a, (select max(adddate) adddate fro ...
- [POJ2104] 区间第k大数 [区间第k大数,可持久化线段树模板题]
可持久化线段树模板题. #include <iostream> #include <algorithm> #include <cstdio> #include &l ...
- R语言 PCA
1.关键点 综述:主成分分析 因子分析 典型相关分析,三种方法的共同点主要是用来对数据降维处理的从数据中提取某些公共部分,然后对这些公共部分进行分析和处理. #主成分分析 是将多指标化为少数几个综合指 ...
- tabBar颜色改动
//未点击的颜色 [[UITabBarItem appearance] setTitleTextAttributes:[NSDictionary dictionaryWithObjectsAndKey ...
- spark streaming updateStateByKey 使用方法
updateStateByKey 解释: 以DStream中的数据进行按key做reduce操作,然后对各个批次的数据进行累加 在有新的数据信息进入或更新时.能够让用户保持想要的不论什么状.使用这个功 ...