SLAM拾萃(3):siftGPU
前言
本周博客我们给大家介绍一下SiftGPU。由于特征匹配是SLAM中非常耗时间的一步,许多人都想把它的时间降至最短,因此目前ORB成了非常受欢迎的特征。而老牌SIFT,则一直给人一种“很严谨很精确,但计算非常慢”的印象。在一个普通的PC上,计算一个640$\times$480的图中的SIFT大约需要几百毫秒左右。如果特征都要算300ms,加上别的ICP什么的,一个SLAM就只能做成两帧左右的速度了,这是很令人失望的。而ORB,FAST之类的特征,由于计算速度较快,在SLAM这种实时性要求较高的场合更受欢迎。
那么,今天我们来说一个GPU版本的SIFT。它是由Wu Changchang同学写的。它能够明显地提升你的程序提取SIFT的速度。同时,它的代码大部分是基于OpenGL的,即使在没有英伟达显卡的机器上也能运行起来。但另一方面,出于某种(历史或人为的)原因,SiftGPU的代码配置起来并不很容易(特别是在Linux下,似乎SiftGPU作者是在win下开发的),代码新人可能会觉得比较困难。现在我们带着大家实践一下SiftGPU,我会给出一个例程供大家测试。
首先,说说我的运行配置。我用的机器是Thinkpad T450, Intel+Nvidia GetForce 940m显卡。但我个人只用Intel卡,所以我就不编译Cuda了。各位有上好N卡的同学也可以搞个Cuda下来编,可能会提高一点速度(但我不保证)。我使用的操作系统是Ubuntu 14.04,OpenCV3.1版本。所以我假设你OpenCV已经装好啦!(所以c++编译器总有的吧!) 不过opencv是不是3.1版本是没关系的,程序在2.x版本上也是能正常运行的。

小萝卜:师兄你这真是宅男标配啊!你到底是在讲配置环境还是在秀桌面啊!
下载SiftGPU与依赖库
SiftGPU主页:http://www.cs.unc.edu/~ccwu/siftgpu/
请找到“SiftGPU-V400"那个下载链接,保存到你的电脑上。然后解压缩,进入压缩后的文件夹。假定你也在用Ubuntu,那么你现在的目录应该是 ~/Downloads/SiftGPU/ 。注意,为了和我保持一致,请你暂时不要下载github上面那个版本,那个与它稍有不同。如果你就是喜欢github,可以把这个编译好,再考虑用github版本。
现在我们来安装依赖项。首先,确保你机器上有OpenGL,请安装以下几项工具:
sudo apt-get install libgl1-mesa-dev libglu1-mesa-dev freeglut3-dev
然后,要安装glew1.5.1以上版本。据我个人经验,最好是去下载glew网站的版本。
glew的网址:http://glew.sourceforge.net/
请下载那个1.13.0版本,zip文件或tgz均可。下载到本地并解压,然后进入该文件夹。我的在~/Downloads/glew-1.13.0
glew是用makefile直接编译的,不用cmake。所以我们直接敲:
make
sudo make install
即可。很快它就编译好了。
注意看make install输出的信息。它默认把编译好的库文件libglew.so.1.13放到了/usr/lib64下。由于之后我们要用cmake去编,但是它可能找不到这个文件夹,所以我们现在先告诉系统,该文件夹下有要找的链接库:
sudo ldconfig /usr/lib64/
ok,现在我们处理完了glew,转去编译SiftGPU。SiftGPU也是用Makefile编译的。现在转到SiftGPU所在文件夹。调用
make
来完成编译。如果顺利的话,你会在bin/目录里得到几个二进制和一个libsiftgpu.so库文件。我们主要使用这个库文件。现在看一下它的链接是否正确:
ldd bin/libsiftgpu.so
这个命令会输出与它链接的库的信息。请保证没有出现某个链接(特别是刚才的GLEW)没有找到的情况(否则这里会通过,但后面会出现undefined reference)。像我这样:

如果这步正确无误,恭喜你,SiftGPU已经编译完成了!真是可喜可贺呀!
小萝卜:然后呢?师兄我还没看到什么感觉很厉害的东西啊?
师兄:下面我们来实际找一个图片,写一段小程序调用SiftGPU,提一下特征试试。为测试速度,我们还要记录一下代码运行时间。
测试SiftGPU
现在我们来写一个测试程序。由于它比较短,我就不专门搞个github了。请大家跟着我做即可。
首先,随意新建一个目录,比如test_siftgpu。我们要写一个c++程序,然后用cmake编译它。现在新建一个main.cpp,内容如下:
// SiftGPU模块
#include <SiftGPU.h> //标准C++
#include <iostream>
#include <vector> // OpenCV图像
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp> // boost库中计时函数
#include <boost/timer.hpp> // OpenGL
#include <GL/gl.h> using namespace std; int main( int argc, char** argv)
{
//声明SiftGPU并初始化
SiftGPU sift;
char* myargv[] ={ "-fo", "-1", "-v", ""};
sift.ParseParam(, myargv); //检查硬件是否支持SiftGPU
int support = sift.CreateContextGL();
if ( support != SiftGPU::SIFTGPU_FULL_SUPPORTED )
{
cerr<<"SiftGPU is not supported!"<<endl;
return ;
} //测试直接读取一张图像
cout<<"running sift"<<endl;
boost::timer timer;
//在此填入你想测试的图像的路径!不要用我的路径!不要用我的路径!不要用我的路径!
sift.RunSIFT( "/home/xiang/wallE-slam/data/rgb1.png" );
cout<<"siftgpu::runsift() cost time="<<timer.elapsed()<<endl; // 获取关键点与描述子
int num = sift.GetFeatureNum();
cout<<"Feature number="<<num<<endl;
vector<float> descriptors(*num);
vector<SiftGPU::SiftKeypoint> keys(num);
timer.restart();
sift.GetFeatureVector(&keys[], &descriptors[]);
cout<<"siftgpu::getFeatureVector() cost time="<<timer.elapsed()<<endl; // 先用OpenCV读取一个图像,然后调用SiftGPU提取特征
cv::Mat img = cv::imread("/home/xiang/wallE-slam/data/rgb1.png", );
int width = img.cols;
int height = img.rows;
timer.restart();
// 注意我们处理的是灰度图,故照如下设置
sift.RunSIFT(width, height, img.data, GL_INTENSITY8, GL_UNSIGNED_BYTE);
cout<<"siftgpu::runSIFT() cost time="<<timer.elapsed()<<endl; return ;
}
Sift接口还是相当简单的。在这程序里,我们一共做了三件事。一是直接对一个图像路径提Sift,二是获取Sift的关键点和描述子。三是对OpenCV读取的一个图像提取Sift。我们分别测了三者的效果和时间。
接下来,写一个CMakeLists.txt来编译上面的文件。
cmake_minimum_required(VERSION 2.8.)
project(test_siftgpu) # OpenCV依赖
find_package( OpenCV REQUIRED ) # OpenGL
find_package(OpenGL REQUIRED) # GLUT
find_package(GLUT REQUIRED) # Glew
find_package(Glew REQUIRED) # SiftGPU:手动设置其头文件与库文件所在位置
include_directories("/home/xiang/Downloads/SiftGPU/src/SiftGPU/" ${OpenGL_INCLUDE_DIR})
set(SIFTGPU_LIBS "/home/xiang/Downloads/SiftGPU/bin/libsiftgpu.so") add_executable( testSIFTGPU main.cpp ) target_link_libraries( testSIFTGPU
${OpenCV_LIBS}
${SIFTGPU_LIBS}
${GLEW_LIBRARIES} ${GLUT_LIBRARIES} ${OPENGL_LIBRARIES}
)
对于SiftGPU,由于它本身没有提供cmake的配置,我们手动去设置了它的头文件与库文件的链接方式。大家可以学习一下这种比较土的办法……然后就是常见的cmake啦:
mkdir build
cd build
cmake ..
make
等一下!是不是还忘了些什么呢?嗯,如果你直接去cmake的话,会报一个find_package找不到glew的错!因为我们装glew的时候是直接用make install装的嘛,cmake怎么会知道我们干了这件事呢?所以此时find_package(Glew REQUIRED)就会出错啦!
小萝卜:为什么出错了你还是很高兴的样子……
师兄:对!现在呢我们要自己写一个FindGlew.cmake文件喽。请打开你的编辑器,输入:
#
# Try to find GLEW library and include path.
# Once done this will define
#
# GLEW_FOUND
# GLEW_INCLUDE_PATH
# GLEW_LIBRARY
# IF (WIN32)
FIND_PATH( GLEW_INCLUDE_PATH GL/glew.h
$ENV{PROGRAMFILES}/GLEW/include
${PROJECT_SOURCE_DIR}/src/nvgl/glew/include
DOC "The directory where GL/glew.h resides")
FIND_LIBRARY( GLEW_LIBRARY
NAMES glew GLEW glew32 glew32s
PATHS
$ENV{PROGRAMFILES}/GLEW/lib
${PROJECT_SOURCE_DIR}/src/nvgl/glew/bin
${PROJECT_SOURCE_DIR}/src/nvgl/glew/lib
DOC "The GLEW library")
ELSE (WIN32)
FIND_PATH( GLEW_INCLUDE_PATH GL/glew.h
/usr/include
/usr/local/include
/sw/include
/opt/local/include
DOC "The directory where GL/glew.h resides")
FIND_LIBRARY( GLEW_LIBRARY
NAMES GLEW glew
PATHS
/usr/lib64
/usr/lib
/usr/local/lib64
/usr/local/lib
/sw/lib
/opt/local/lib
DOC "The GLEW library")
ENDIF (WIN32) IF (GLEW_INCLUDE_PATH)
SET( GLEW_FOUND CACHE STRING "Set to 1 if GLEW is found, 0 otherwise")
ELSE (GLEW_INCLUDE_PATH)
SET( GLEW_FOUND CACHE STRING "Set to 1 if GLEW is found, 0 otherwise")
ENDIF (GLEW_INCLUDE_PATH) MARK_AS_ADVANCED( GLEW_FOUND )
然后呢,把这个文件放到cmake的modules文件夹中去!这样cmake就会知道你在调用find_package(Glew)时怎么找啦!
sudo cp ./FindGlew.cmake /usr/share/cmake-2.8/Modules/
注意到这个文件所在的目录通常是没有写权限的的哦!所以我们要用sudo提升到管理员权限才行呢。
这时,再调用cmake ..,就不会报上面的错误啦!而编译也得以顺利进行下去了。
但是!但是!编译还是出错了,错误如下:
/home/xiang/Downloads/SiftGPU/src/SiftGPU/SiftGPU.h::: error: declaration of ‘operator new’ as non-function SIFTGPU_EXPORT void* operator new (size_t size);
这是什么原因呢?g++的编译错误很难懂,一直为人诟病。师兄仔细查了查,发现SiftGPU作者重载了new运算符,但是它的参数"size_t size"中的"size_t"类型,在linux下编译是需要指定一个头文件的!所以我们打开~/Downloads/SiftGPU/src/SiftGPU/SiftGPU.h文件,在上头加入一个
#include <stddef.h>
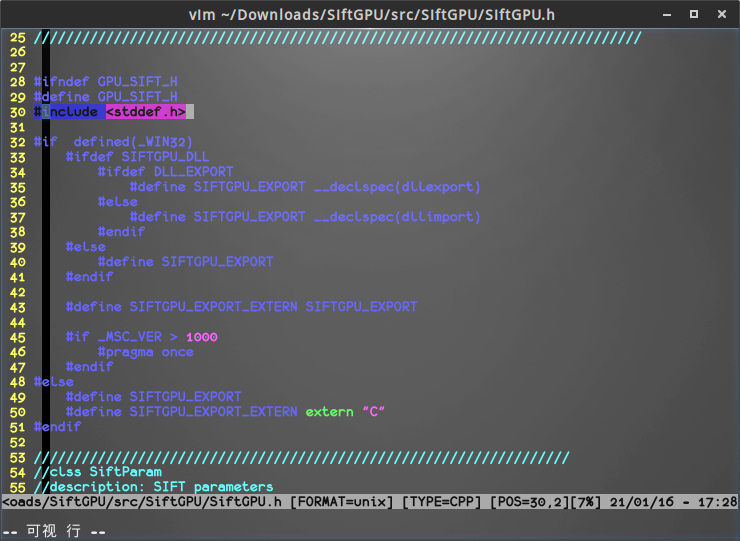
这样编译器就会找到size_t类型啦!编译就能通过喽!
SiftGPU运行结果
以下就是在师兄电脑上的运行结果啦,大家可以看一下:

对于OpenCV已经读入的数据,在640x480的分辨率下,用SiftGPU只需40多毫秒即可完成计算了呢!GPU真的是很强大啊!即使在没有Cuda的情况下都取得了近十倍的加速啊!效果拔群!
小萝卜:我的ORB只要30毫秒就行了,哼.
小结
本篇介绍了SiftGPU,我们带领读者完成了它的编译,并在自己的程序内实现了调用。可以看到它的加速效果还是不错的!
另外,这也是我的一次尝试,告诉读者在编译过程中遇到问题该如何处理。我本可以直接跳过这些buggy的部分,告诉大家运行的结果。但我觉得这样子讲可能对读者更有帮助啦!
如果你觉得我的博客有帮助,可以进行几块钱的小额赞助,帮助我把博客写得更好。
SLAM拾萃(3):siftGPU的更多相关文章
- SLAM拾萃(1):octomap
前言 大家好,时隔多年之后,我又开始了博客旅程.经历了很多事情之后呢,我发现自己的想法真的很简单:好好读书做课题,闲下来时写写博客,服务大家.所以我会继续写SLAM相关的博客.如果你觉得它对你有帮助, ...
- SLAM拾萃(2):doxygen
今天给大家介绍一下doxygen.这个工具由来已久了,至少08年左右就已经在用了,但是目前还没见到好的介绍.我个人觉得这是个很简单易用的工具,但是为什么看了别人介绍反而觉得复杂了……所以趁着今天比较闲 ...
- [学习笔记]SiftGPU入门
当有读者看到我这篇SiftGPU入门的学习笔记时,相信你已经读过了高博那篇<SLAM拾萃:SiftGPU>,那篇文章写于16年,已经过去两年的时间.在我尝试配置SiftGPU的环境时,遇到 ...
- octomap的简介
装载自高翔博士的博客:https://www.cnblogs.com/gaoxiang12/p/5041142.html 什么是octomap? RGBD SLAM的目的有两个:估计机器人的轨迹,并建 ...
- (2)RGB-D SLAM系列- 工具篇(依赖库及编译)
做了个SLAM的小视频,有兴趣的朋友可以看下 https://youtu.be/z5wDzMZF10Q 1)Library depended 一个完整的SLAM系统包括,数据流获取,数据读取,特征提取 ...
- (1)RGB-D SLAM系列- 工具篇(硬件+关键技术)
/*************************************************************************************************** ...
- slam相关知识
Kinect视觉SLAM技术介绍 http://www.open-open.com/news/view/ce76e2 本文介绍SLAM的历史.理论以及实现的方式,且主要介绍基于视觉(Kinect)的实 ...
- [摘抄] SFM 和 Visual SLAM
来自知乎: SFM和vSLAM基本讨论的是同一问题,不过SFM是vision方向的叫法,而vSLAM是robotics方向的叫法. vSLAM所谓的mapping,vision方向叫structure ...
- 视觉SLAM实战(一):RGB-D SLAM V2
写在前面 首先打个广告.SLAM研究者交流QQ群:254787961.欢迎各路大神和小白前来交流. 看了前面三篇博文之后,是不是有同学要问:博主你扯了那么多有用没用的东西,能不能再给力一点,拿出一个我 ...
随机推荐
- 使用ConditionalScope进行高效的SharePoint CSOM编程
在上一篇文章中讲述了 ExceptionHandlingScope的使用后,本章主要讲述ConditionalScope的用法. ConditionalScope在设计思路和解决问题上同Excepti ...
- 免费好用的web应用托管平台-续
上一篇博客给大家推荐了目前处于免费阶段的PAAS平台,可以托管各种应用,大家反响很不错,说明大家还是很需要和认可这个免费托管各种web应用的京东云擎平台.但是很多用户还是很担心未来可能还是会收费,对于 ...
- Windows 8.1——将网站固定到开始菜单,自定义图标、颜色和Windows推送通知
记得在IE 9和Windows 7刚出来那会儿我写过一篇文章来介绍如何自定义网站将其固定到Windows的任务栏上,同时自定义图标及任务内容.那个功能在IE 9中被称之为JumpList.http:/ ...
- Qt之Dialog\widget\ mainwindow的区别和布局管理器 & 分裂器的区别
1.Dialog\widget\ mainwindow的区别 注意mainwindow和widget的区别,mainwindow都工具栏和菜单栏 Dialog and mainwinodws 都是继承 ...
- fir.im Weekly - 如果让你重新做一款APP
设想下:如果让你重新做一款 APP ,你会用到哪些开发.设计等资源和工具? 本期的 Weekly 为大家分享了最近不错的 APP 开发资源,大部分是关于 iOS 开发. Android 开发.UI设计 ...
- iOS开发---集成ShareSDK实现第三方登录、分享、关注等功能。
(1)官方下载ShareSDK IOS 2.9.6,地址:http://sharesdk.mob.com/Download (2)根据实际情况,引入相关的库,参考官方文档. (3)在项目的AppDel ...
- php对csv文件的读取,写入,输出下载操作
在实际工作中,很多时候需要把网站上的一些数据下载到CSV文件里,方便以后查看. 亦或者是用CSV进行一些批量的上传工作. 这个时候我们就需要对CSV进行读写操作. 1.CSV的读取操作 <?ph ...
- 比较用decodeFileDescriptor和decodeFile的区别
从本地中读取图片,可以用decodeFileDescriptor和decodeFile,至于哪一种方式的耗内存情况作了一次简单对比,可能一次选取6张图片数量过少,貌似区别不大,decodeFileDe ...
- linux平台下防火墙iptables原理(转)
原文地址:http://www.cnblogs.com/ggjucheng/archive/2012/08/19/2646466.html iptables简介 netfilter/iptables( ...
- ACPI I/O resource conflict with SMBus
ACPI I/O resource conflict with SMBus 以電子郵件傳送這篇文章BlogThis!分享至 Twitter分享至 Facebook分享到 Pinterest 這幾天遇到 ...