第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】

1、把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch 。
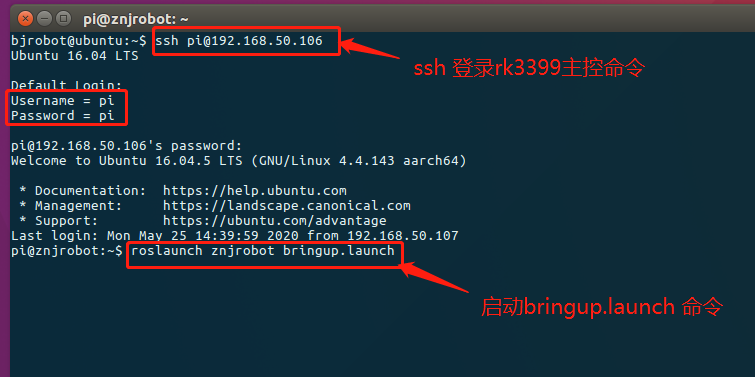
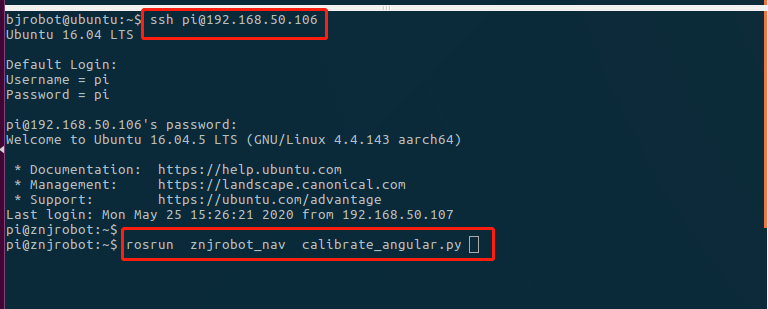
2、再打开一个终端 ssh 过去主控端,启动校正角速度命令rosrun znjrobot_nav calibrate_angular.py
3、在虚拟机端打开一个终端,直接运行 rosrun rviz rviz
4、全屏化后点击 File,点击 Open Config:
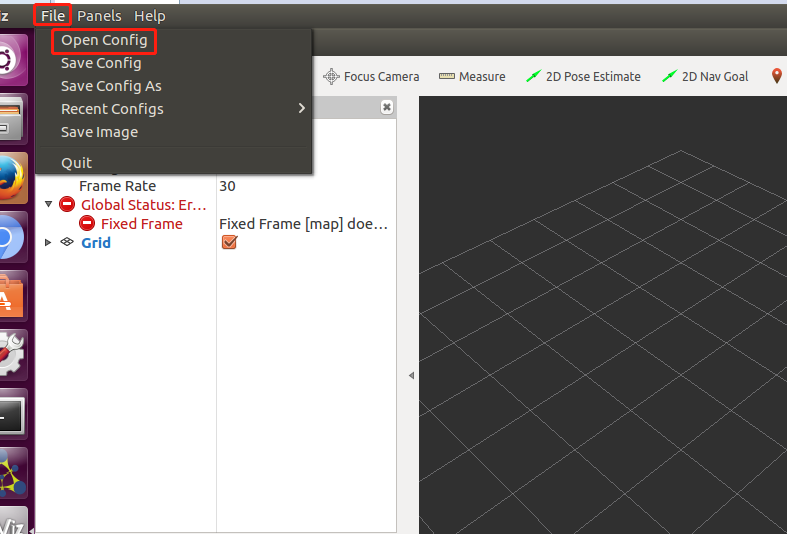
5、找到路径下~/catkin_ws/src/znjrobot_project/znjrobot/rviz/ 的odometry.rviz 文件。点 Open

6、把 rviz 窗口调整到合适位置,调整方法:用鼠标滚轮点住灰色区域,可以拖动地图;鼠标滚轮上下滚动可以放大缩小地图;鼠标左键点住灰色区域可以翻转地图。

7、先记下手机指南针第一次的度数,比如:静止时第一次手机指南针度数50 度,如果原地旋转小车后(双手托起小车),小车转动后停下的度数超过 50,那么就是转够了一圈有多,如果小车转动后停下的度数小于 50,那么就是没有转够一圈。分以下两种情况:
情况 1:小车停下后度数假如是 60 度,那么小车实际上是转了 370 度。此时角速度比例系数 anguler_scale= 370/360 = 1.028
情况 2:小车停下后度数假如是 40 度,那么小车实际上是转了 350 度。此时角速度比例系数 anguler_scale= 350/360 = 0.972
8、在主控端的 bringup.launch 文件中把 anguler_scale 修改成实际计算好的角速度比例系数。


9、修改完成后,重新在主控端运行bringup.launch 、calibrate_angular.py文件,以及虚拟机端的rviz文件,然后第二次观察手机指南针上面的度数,记下度数,再次原地转动小车,小车实际转动多少度,然后跟第二次的度数做对比,差值小于 10 度以内的都是差不多可以的。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第三章节 BJROBOT 角速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】
版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用.发布.转载等,否则将追究其法律责任. 使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!! 第一章节 BJ ...
- 第二章节 BJROBOT IMU 自动校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch . 2.再打开一个终端,ssh 过去主控端,在 ~/c ...
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第八章节 BJROBOT hector 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot bringup.launch. 2.在虚拟机端打开一个终端,ssh 过去主控端启动r ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十章节 BJROBOT PID 动态调节【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车架空,平放在地板上,注意四个轮子一定要悬空.用资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjrobot bringup.launch. 2.在虚拟机端再 ...
随机推荐
- Python中sorted(iterable, /, *, key=None, reverse=False)的参数中的斜杆是什么意思?
通过help(sorted)查看sorted的帮助文档,显示如下: Help on built-in function sorted in module builtins: sorted(iterab ...
- C# Email 帮助类 EmailHelper
1. 配置文件 App.config <?xml version="1.0" encoding="utf-8" ?> <configurati ...
- 项目实战:Qt多通道数据采集系统(通道配置、电压转换、采样频率、通道补偿值、定时采集、导出exel和图表、自动XY轴、隐藏XY轴、实时隐藏显示通道)
需求 1.通道使能.选择.更改通道名称.设置显示颜色 2.采样率可设置(Sa/s/chj) 3.单位换算,按照给定的进行换算 4.对通道可进行设置补偿值 5.通道取消可动态显示和隐藏,并可 ...
- 题解-CF1389F Bicolored Segments
题面 CF1389F Bicolored Segments 给 \(n\) 条线段 \([l_i,r_i]\),每条有个颜色 \(t_i\in\{0,1\}\),求最多选出多少条线段,使没有不同颜色的 ...
- Python编码相关
1.#coding=utf-8的作用 作用是这个文件代码的编码格式,如果没有声明代码中不能出现中文字符,包括注释中也不能出现.否则会报错SyntaxError: Non-ASCII character ...
- 传输层-Transport Layer(下):UDP与TCP报头解析、TCP滑动窗口、TCP拥塞控制详解
第六章 传输层-Transport Layer(下) 上一篇文章对传输层的寻址方式.功能.以及流量控制方法做了简短的介绍,这一部分将介绍传输层最重要的两个实例:TCP协议和UDP协议,看一看之前描述的 ...
- python制作命令行工具——fire
python制作命令行工具--fire 前言 本篇教程的目的是希望大家可以通读完此篇之后,可以使用python制作一款符合自己需求的linux工具. 本教程使用的是google开源的python第三方 ...
- sql 语句使用和转换json数据
1 连接mysql import pymysql import concurrent coon=pymysql.connect(host='localhost',user='root',passwor ...
- PluginOK中间件高级版-支持在Chrome、Edge、Firefox等浏览器网页中真正内嵌ActiveX等控件运行的版本已获多家上市公司采购
PluginOK(牛插)中间件(原名:本网通WebRunLocal)是一个实现WEB浏览器(Web Browser)与本地程序(Local Application)之间进行双向调用的低成本.强兼容.安 ...
- linux下postgresql安装
1.下载地址 https://www.enterprisedb.com/download-postgresql-binaries 2.创建用户并修改密码 [root@node01 ~]# userad ...