(转载)YOLO配置文件理解
YOLO配置文件理解
[net]
batch=64 每batch个样本更新一次参数。
subdivisions=8 如果内存不够大,将batch分割为subdivisions个子batch,每个子batch的大小为batch/subdivisions。
在darknet代码中,会将batch/subdivisions命名为batch。
height=416 input图像的高
width=416 Input图像的宽
channels=3 Input图像的通道数
momentum=0.9 动量
decay=0.0005 权重衰减正则项,防止过拟合
angle=0 通过旋转角度来生成更多训练样本
saturation = 1.5 通过调整饱和度来生成更多训练样本
exposure = 1.5 通过调整曝光量来生成更多训练样本
hue=.1 通过调整色调来生成更多训练样本
learning_rate=0.0001 初始学习率
max_batches = 45000 训练达到max_batches后停止学习
policy=steps 调整学习率的policy,有如下policy:CONSTANT, STEP, EXP, POLY, STEPS, SIG, RANDOM
steps=100,25000,35000 根据batch_num调整学习率
scales=10,.1,.1 学习率变化的比例,累计相乘
[convolutional]
batch_normalize=1 是否做BN
filters=32 输出多少个特征图
size=3 卷积核的尺寸
stride=1 做卷积运算的步长
pad=1 如果pad为0,padding由 padding参数指定。如果pad为1,padding大小为size/2
activation=leaky 激活函数:
logistic,loggy,relu,elu,relie,plse,hardtan,lhtan,linear,ramp,leaky,tanh,stair
[maxpool]
size=2 池化层尺寸
stride=2 池化步进
[convolutional]
batch_normalize=1
filters=64
size=3
stride=1
pad=1
activation=leaky
[maxpool]
size=2
stride=2
......
......
#######
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[route] the route layer is to bring finer grained features in from earlier in the network
layers=-9
[reorg] the reorg layer is to make these features match the feature map size at the later layer.
The end feature map is 13x13, the feature map from earlier is 26x26x512.
The reorg layer maps the 26x26x512 feature map onto a 13x13x2048 feature map
so that it can be concatenated with the feature maps at 13x13 resolution.
stride=2
[route]
layers=-1,-3
[convolutional]
batch_normalize=1
size=3
stride=1
pad=1
filters=1024
activation=leaky
[convolutional]
size=1
stride=1
pad=1
filters=125 region前最后一个卷积层的filters数是特定的,计算公式为filter=num*(classes+5)
5的意义是5个坐标,论文中的tx,ty,tw,th,to
activation=linear
[region]
anchors = 1.08,1.19, 3.42,4.41, 6.63,11.38, 9.42,5.11, 16.62,10.52 预选框,可以手工挑选,
也可以通过k means 从训练样本中学出
bias_match=1
classes=20 网络需要识别的物体种类数
coords=4 每个box的4个坐标tx,ty,tw,th
num=5 每个grid cell预测几个box,和anchors的数量一致。当想要使用更多anchors时需要调大num,且如果调大num后训练时Obj趋近0的话可以尝试调大object_scale
softmax=1 使用softmax做激活函数
jitter=.2 通过抖动增加噪声来抑制过拟合
rescore=1 暂理解为一个开关,非0时通过重打分来调整l.delta(预测值与真实值的差)
object_scale=5 栅格中有物体时,bbox的confidence loss对总loss计算贡献的权重
noobject_scale=1 栅格中没有物体时,bbox的confidence loss对总loss计算贡献的权重
class_scale=1 类别loss对总loss计算贡献的权重
coord_scale=1 bbox坐标预测loss对总loss计算贡献的权重
absolute=1
thresh = .6
random=0 random为1时会启用Multi-Scale Training,随机使用不同尺寸的图片进行训练。
123456789101112131415161718192021222324252627282930313233343536373839404142434445464748495051525354555657585960616263646566676869707172737475767778798081828384858687888990919293949596979899100101102103104105106107108109110111112113114115
darknet对应代码
找到cfg文件解析的代码,选择detector demo 作为入口
darknet.c文件 main 函数开始
} else if (0 == strcmp(argv[1], "detector")){
run_detector(argc, argv);
123
Detector.c文件 run_detector函数
char *prefix = find_char_arg(argc, argv, "-prefix", 0);
float thresh = find_float_arg(argc, argv, "-thresh", .24);
float hier_thresh = find_float_arg(argc, argv, "-hier", .5);
int cam_index = find_int_arg(argc, argv, "-c", 0);
int frame_skip = find_int_arg(argc, argv, "-s", 0);
if(argc < 4){
fprintf(stderr, "usage: %s %s [train/test/valid] [cfg] [weights (optional)]\n", argv[0], argv[1]);
return;
}
char *gpu_list = find_char_arg(argc, argv, "-gpus", 0);
char *outfile = find_char_arg(argc, argv, "-out", 0);
......
......
else if(0==strcmp(argv[2], "demo")) {
list *options = read_data_cfg(datacfg);
int classes = option_find_int(options, "classes", 20);
char *name_list = option_find_str(options, "names", "data/names.list");
char **names = get_labels(name_list);
demo(cfg, weights, thresh, cam_index, filename, names, classes, frame_skip, prefix, hier_thresh);
}
1234567891011121314151617181920212223
read_data_cfg函数解析配置文件,保存到options指针。
class
int classes = option_find_int(options, "classes", 20);
12
classes为YOLO可识别的种类数
batch、learning_rate、momentum、decay和 subdivisions
demo.c文件demo函数
net = parse_network_cfg(cfgfile);
12
Parser.c文件 parse_network_cfg函数
list *sections = read_cfg(filename);
node *n = sections->front;
if(!n) error("Config file has no sections");
network net = make_network(sections->size - 1);
net.gpu_index = gpu_index;
size_params params;
section *s = (section *)n->val;
list *options = s->options;
if(!is_network(s)) error("First section must be [net] or [network]");
parse_net_options(options, &net);
123456789101112
parse_net_options函数
net->batch = option_find_int(options, "batch",1);
net->learning_rate = option_find_float(options, "learning_rate", .001);
net->momentum = option_find_float(options, "momentum", .9);
net->decay = option_find_float(options, "decay", .0001);
int subdivs = option_find_int(options, "subdivisions",1);
net->time_steps = option_find_int_quiet(options, "time_steps",1);
net->batch /= subdivs;
net->batch *= net->time_steps;
net->subdivisions = subdivs;
12345678910
learning_rate为初始学习率,训练时的真正学习率和学习率的策略及初始学习率有关。
momentum为动量,在训练时加入动量可以帮助走出local minima 以及saddle point。
decay是权重衰减正则项,用来防止过拟合。
batch的值等于cfg文件中的batch/subdivisions 再乘以time_steps。
time_steps在yolo默认的cfg中是没有配置的,所以是默认值1。
因此batch可以认为就是cfg文件中的batch/subdivisions。
前面有提到batch的意义是每batch个样本更新一次参数。
而subdivisions的意义在于降低对GPU memory的要求。
darknet将batch分割为subdivisions个子batch,每个子batch的大小为batch/subdivisions,并将子batch命名为batch。
我们看下训练时和batch有关的代码
Detector.c文件的train_detector函数
#ifdef GPU
if(ngpus == 1){
loss = train_network(net, train);
} else {
loss = train_networks(nets, ngpus, train, 4);
}
#else
loss = train_network(net, train);
#endif
12345678910
Network.c文件的train_network函数
int batch = net.batch;
int n = d.X.rows / batch;
float *X = calloc(batch*d.X.cols, sizeof(float));
float *y = calloc(batch*d.y.cols, sizeof(float));
int i;
float sum = 0;
for(i = 0; i < n; ++i){
get_next_batch(d, batch, i*batch, X, y);
float err = train_network_datum(net, X, y);
sum += err;
}
12345678910111213
train_network_datum函数
*net.seen += net.batch;
......
......
forward_network(net, state);
backward_network(net, state);
float error = get_network_cost(net);
if(((*net.seen)/net.batch)%net.subdivisions == 0) update_network(net);
12345678
我们看到,只有((*net.seen)/net.batch)%net.subdivisions == 0时才会更新网络参数。
net.seen是已经训练过的子batch数,((net.seen)/net.batch)%net.subdivisions的意义正是已经训练过了多少个真正的batch。
policy、steps和scales
Parser.c文件 parse_network_cfg函数
char *policy_s = option_find_str(options, "policy", "constant");
net->policy = get_policy(policy_s);
net->burn_in = option_find_int_quiet(options, "burn_in", 0);
if(net->policy == STEP){
net->step = option_find_int(options, "step", 1);
net->scale = option_find_float(options, "scale", 1);
} else if (net->policy == STEPS){
char *l = option_find(options, "steps");
char *p = option_find(options, "scales");
if(!l || !p) error("STEPS policy must have steps and scales in cfg file");
int len = strlen(l);
int n = 1;
int i;
for(i = 0; i < len; ++i){
if (l[i] == ',') ++n;
}
int *steps = calloc(n, sizeof(int));
float *scales = calloc(n, sizeof(float));
for(i = 0; i < n; ++i){
int step = atoi(l);
float scale = atof(p);
l = strchr(l, ',')+1;
p = strchr(p, ',')+1;
steps[i] = step;
scales[i] = scale;
}
net->scales = scales;
net->steps = steps;
net->num_steps = n;
} else if (net->policy == EXP){
net->gamma = option_find_float(options, "gamma", 1);
} else if (net->policy == SIG){
net->gamma = option_find_float(options, "gamma", 1);
net->step = option_find_int(options, "step", 1);
} else if (net->policy == POLY || net->policy == RANDOM){
net->power = option_find_float(options, "power", 1);
}
123456789101112131415161718192021222324252627282930313233343536373839
get_policy函数
if (strcmp(s, "random")==0) return RANDOM;
if (strcmp(s, "poly")==0) return POLY;
if (strcmp(s, "constant")==0) return CONSTANT;
if (strcmp(s, "step")==0) return STEP;
if (strcmp(s, "exp")==0) return EXP;
if (strcmp(s, "sigmoid")==0) return SIG;
if (strcmp(s, "steps")==0) return STEPS;
fprintf(stderr, "Couldn't find policy %s, going with constant\n", s);
return CONSTANT;
12345678910
学习率动态调整的策略有多种,YOLO默认使用的是steps。
yolo-voc.cfg文件:
steps=100,25000,35000
scales=10,.1,.1
Network.c文件get_current_rate函数
int batch_num = get_current_batch(net);
int i;
float rate;
switch (net.policy) {
case CONSTANT:
return net.learning_rate;
case STEP:
return net.learning_rate * pow(net.scale, batch_num/net.step);
case STEPS:
rate = net.learning_rate;
for(i = 0; i < net.num_steps; ++i){
if(net.steps[i] > batch_num) return rate;
rate *= net.scales[i];
//if(net.steps[i] > batch_num - 1 && net.scales[i] > 1) reset_momentum(net);
}
return rate;
1234567891011121314151617
get_current_batch获取的是(net.seen)/(net.batchnet.subdivisions),即真正的batch。
steps的每个阶段是根据batch_num划分的,根据配置文件,学习率会在batch_num达到100、25000、35000时发生改变。
当前的学习率是初始学习率与当前阶段及之前所有阶段对应的scale的总乘积。
convolutional超参数加载
Parser.c文件parse_network_cfg函数
LAYER_TYPE lt = string_to_layer_type(s->type);
if(lt == CONVOLUTIONAL){
l = parse_convolutional(options, params);
1234
parse_convolutional函数
int n = option_find_int(options, "filters",1);
int size = option_find_int(options, "size",1);
int stride = option_find_int(options, "stride",1);
int pad = option_find_int_quiet(options, "pad",0);
int padding = option_find_int_quiet(options, "padding",0);
if(pad) padding = size/2;
char *activation_s = option_find_str(options, "activation", "logistic");
ACTIVATION activation = get_activation(activation_s);
int batch,h,w,c;
h = params.h;
w = params.w;
c = params.c;
batch=params.batch;
if(!(h && w && c)) error("Layer before convolutional layer must output image.");
int batch_normalize = option_find_int_quiet(options, "batch_normalize", 0);
123456789101112131415161718
需要注意的是如果enable了pad,cfg文件中的padding不会生效,实际的padding值为size/2。
random
YOLOv2新增了一些训练技巧,Multi-Scale Training就是其中之一,如果random置为1,会启用Multi-Scale Training。
启用Multi-Scale Training时每10个Batch,网络会随机地选择一个新的图片尺寸,由于使用的down samples是32,所以不同的尺寸大小也选择为32的倍数{320,352…..608},最小320320,最大608608,网络会自动改变尺寸,并继续训练的过程。
这一策略让网络在不同的输入尺寸上都能达到一个很好的预测效果,同一网络能在不同分辨率上进行检测。当输入图片尺寸比较小的时候跑的比较快,输入图片尺寸比较大的时候精度高。
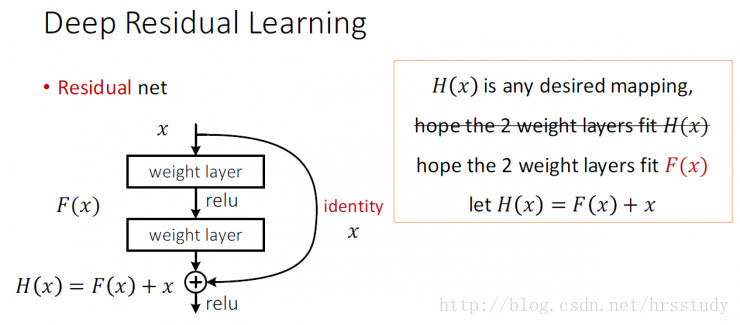
route 和 reorg
YOLOv2新增了Fine-Grained Features技巧,参考特征金字塔和ResNet,把高分辨率特征与低分辨率特征联系在一起,从而增加对小物体的识别精度。
借用一下ResNet的identity mappings示意图
YOLOv2加上了一个Passthrough Layer来取得之前的某个2626分辨率的层的特征。这个Passthrough layer把26 * 26的特征图与13 * 13的特征图联系在一起,把相邻的特征堆积在不同的Channel之中,类似与Resnet的Identity Mapping,从而把2626512变成1313*2048。
route层起连接作用,reorg层来match特征图尺寸。
(转载)YOLO配置文件理解的更多相关文章
- YOLO配置文件理解
[net] batch=64 每batch个样本更新一次参数. subdivisions=8 如果内存不够大,将batch分割为subdivisions个子batch,每个子batch的大小为batc ...
- [转载]三十分钟理解:线性插值,双线性插值Bilinear Interpolation算法
[转载]三十分钟理解:线性插值,双线性插值Bilinear Interpolation算法 来源:https://blog.csdn.net/xbinworld/article/details/656 ...
- (转载)彻底的理解:WebService到底是什么?
最近老是有人跟我提web service接口,怎么,怎么滴,我觉得很扎耳朵,web service是一种将服务器的服务封装起来的技术,表现为对外提供接口,所以,web service不是一种接口 !! ...
- 【转载】配置文件报错:不允许有匹配 [xX][mM][lL] 的处理指令目标
今天编写代码的时候,不小心给一个xml文件的首行加了一行空格,导致了启动报了如题类似的错误,查到一篇文章,顺藤摸瓜发现了这个失误,文章转载如下: 框架整合 的时候,XML 配置文件大多数情况是从另一个 ...
- 2-2-sshd服务安装管理及配置文件理解和安全调优
大纲: 1. 培养独自解决问题的能力 2. 学习第二阶段Linux服务管理的方法 3. 安装sshd服务 4. sshd服务的使用 5. sshd服务调优 6. 初步介绍sshd配置文件 ###### ...
- [转载]深入理解Batch Normalization批标准化
文章转载自:http://www.cnblogs.com/guoyaohua/p/8724433.html Batch Normalization作为最近一年来DL的重要成果,已经广泛被证明其有效性和 ...
- 【转载】深入理解PHP Opcode缓存原理
转载地址:深入理解PHP Opcode缓存原理 什么是opcode缓存? 当解释器完成对脚本代码的分析后,便将它们生成可以直接运行的中间代码,也称为操作码(Operate Code,opcode).O ...
- 【转载】深入理解Java的接口和抽象类
深入理解Java的接口和抽象类 对于面向对象编程来说,抽象是它的一大特征之一.在Java中,可以通过两种形式来体现OOP的抽象:接口和抽象类.这两者有太多相似的地方,又有太多不同的地方.很多人在初学的 ...
- 【转载】快速理解android View的测量onMeasure()与MeasureSpec
笔者之前有一篇文章已经使用onMeasure()解决了listview与scollview的显示冲突问题,博客地址如下: onMeasure简单方法 完美解决ListView与ScollView冲突问 ...
随机推荐
- 【Android N 7.1.1】 处于锁屏界面时可以转屏
frameworks/base/packages/SystemUI/src/com/android/systemui/statusbar/phone/StatusBarWindowManager.ja ...
- luogu P2066 机器分配[背包dp+方案输出]
题目背景 无 题目描述 总公司拥有高效设备M台,准备分给下属的N个分公司.各分公司若获得这些设备,可以为国家提供一定的盈利.问:如何分配这M台设备才能使国家得到的盈利最大?求出最大盈利值.其中M≤15 ...
- 如何学习 cocos2d-x ?
发表于 04/23/2014 作者 zrong — 24 条评论 ↓ 11,687 次查看 本站文章除注明转载外,均为本站原创或者翻译. 本站文章欢迎各种形式的转载,但请18岁以上的转载者注明文章出处 ...
- struts2的占位符*在action中的配置方法
转自:https://blog.csdn.net/u012546338/article/details/68946633 在配置<action> 时,可以在 name,class,meth ...
- Jenkins之pipeline流水线配置
使用gitlab监听事件一旦git push自动部署 使用构建后操作 配置完用户构建前一步会自动构建下一个项目 pipeline插件 新建视图 点击run运行
- oracle通过profile限制用户的恶意登录和使用期限
用户profile口令管理 1,可以把profile想象成一个数据对象(文件,规则) 案例: 允许某用户,最多尝试登录3次,如3次未登录成功,则锁定该用户,锁定后两天不能登录系统 设置语法(syste ...
- CentOS下LVM逻辑卷管理技术解释
1.LVM逻辑卷管理技术产生的背景 企业日益变化的存储需要使得传统的磁盘分区存储显得不够灵活 2.磁盘分区存储 对于这样的三个物理分区的话,迟早有一天会被数据填满,因为它是死的,无法进行缩放. 假设下 ...
- Django之urls.py详解
urls.py:URL分发器(路由配置文件)URL配置(URLconf)就像是Django所支撑网站的目录.它的本质是URL模式以及要为该URL模式调用的视图函数之间的映射表.你就是以这种方式告诉Dj ...
- oracle(十一) scn
SCN(System Chang Number)作为oracle中的一个重要机制,在数据恢复.Data Guard.Streams复制.RAC节点间的同步等各个功能中起着重要作用. 理解SCN的运作机 ...
- [GDAL]编译64位GDAL1.10
环境VS2010,swigwin-2.0.11 1. 打开nmake.opt文件,找到SWIG=swig.exe这一句,假如没有将swig的目录添加到环境变量中,那么将这句后面的swig.exe修改为 ...