目标检测(六)YOLOv2__YOLO9000: Better, Faster, Stronger
Abstract
在该论文中,作者首先介绍了对YOLOv1检测系统的各种改进措施。改进后得到的模型被称为YOLOv2,它使用了一种新颖的多尺度训练方法,使得模型可以在不同尺寸的输入上运行,并在速度和精度上很容易找到平衡。当处理速度为40FPS时,YOLOv2取得76.8mAP的成绩,超过了当时最好的检测方法Faster RCNN with ResNet和SSD
接着,作者提出了一种在object detection和classification两个任务上进行联合训练的方法。借助该方法,作者同时在COCO检测数据集和ImageNet分类数据集上训练YOLO9000,最终使得YOLO9000能够检测在dectection dataset中不存在相应数据但是在cassification dataset中存在的classes
1. Introduction
通用的目标检测算法应该速度快、精度高,并且能够识别a wide variety of objects。虽然目前的detection frameworks已经变得足够fast and accuracy,但是绝大多数方法的检测范围仍局限于小部分objects
作者发现,与分类和tagging任务的数据集相比,当前用于目标检测的数据集非常受限。通常使用的目标检测数据集有几千到几十万张图像,对应几十到几百个tags,而分类数据集有几百万张图像,对应几万到几十万种categories。作者希望目标检测的范围能够达到目标分类那样的水平,可是标记检测使用的images比标记分类用的images要expensive很多,因此想得到拥有大量categories的目标检测数据集是不可能的
为了解决这个问题,作者在论文中提出了一种数据集结合法(dataset combination method)来利用现有的大量分类数据扩大当前检测系统的检测范围。该方法使用目标分类的分层视图(hierarchical view )将不同的数据集结合在一起
同时,作者提出了一种联合训练算法(joint training algorithm),使得object detection model能够同时在检测和分类数据集上训练。Model使用带标签的detection images来学习精确地定位objects,同时使用classification images来增加可检测的categories,提高鲁棒性
最终,使用数据集结合法和联合训练算法训练得到的YOLO9000可以实时检测超过9000种不同的object categories
后面的内容分为两部分:一部分是基于base yolo检测算法改进得到YOLOv2的过程;另一部分是使用数据集结合法和联合训练法训练YOLO9000的过程
第一部分:对YOLOv1的改进
在记录此部分之前我们先来简单地回顾下yolo模型的大致检测步骤:
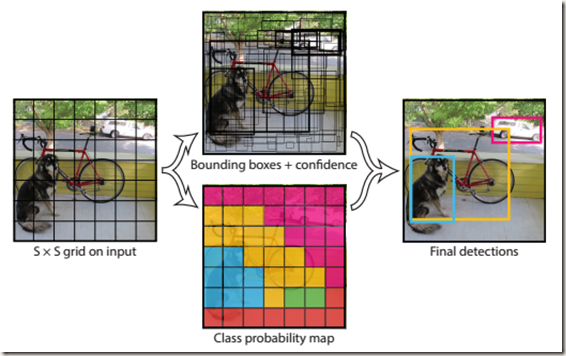
- 将输入图像划分成S*S的网格(论文中使用7*7 grid,通过设置输出shape实现划分);
- 每个网格cell预测输入图像对应位置上的B个bounding boxes(通过对相同shape的labels进行回归训练实现对应位置的预测;没有使用anchor boxes,因为仅是指定了每个cell预测的数量,没有指定先验框);
- 根据设置的confidence score阈值去除预测得到的S*S*B个bounding boxes中score较低的bboxes,再利用非极大值抑制去除冗余的bounding boxes(避免多个bbox对应一个object)
2. Better
与Fast RCNN相比,YOLOv1有较多的定位误差;与基于region proposals的目标检测算法相比,YOLOv1的召回率比较低。因此作者关注如何在保持分类精度的同时提高回召率与定位精度
计算机视觉中一般倾向于使用更大更深的网络,因为训练larger networks或者集成多个模型能够带来更好的性能。但是,作者希望YOLOv2在做到更精确的同时,仍能够保持很快的速度。因此,作者没有采用扩大网络的方法,相反地,作者简化了网络,使得representation更容易学习。为此,作者基于以往的工作提出了一系列ideas来改善YOLOv1的性能。总的结果如Table 2所示:
具体如下:
- Batch Normalization
CNN在训练过程中网络每层输入的分布一直在改变,这会使训练过程难度加大,但可以通过 normalize 每层的输入解决这个问题。Batch normalization 可以显著改善收敛性,同时不需要其他形式的 regularization。通过在 YOLOv1 的所有卷积层中添加 batch normalization,mAP可以获得超过2%的提升。同时,batch normalization也有助于regularize the model。借助batch normalization,model可以不使用dropout减少overfitting - High Resolution Classifier
目前所有的 state-of-the-art 目标检测方法都使用在 ImageNet 上预训练的 classifier,YOLOv1 也不例外。从 AlexNet 网络开始,大多数 classifiers 的输入图像都小于256*256。同样,原始的 yolov1在224*224的输入图像上训练classifier network,然后增加图像的分辨率至448*448训练detection network。这就意味着在转换分辨率后网络需要同时学习object detetion和适应新的input resolution。
在YOLOv2中,作者先在ImageNet数据集上以448*448的分辨率fine tune 分类网络(classification network)10个epochs。这样就给了网络一定的时间来调整filters,以便在更高的分辨率输入上work better。接着作者在detection dataset上fine tune 网络。实验证实,作者使用的high resolution classification network给mAP带来几乎4%的提升。 - Convolutional With Anchor Boxes
YOLOv1使用feature extractor后面的fully connected layers直接预测bounding boxes的坐标,使得网络丢失较多的空间信息,从而定位不准。与直接预测坐标不同,Faster RCNN使用hand-picked priors预测bounding boxes。Faster RCNN中的region proposal network(RPN)只使用卷积层预测anchor boxes的offsets和confidences(RPN先在feature maps的每个位置预测出k个尺寸为achor boxes的region proposals,然后通过后面的 detection network 对 region proposals 进行分类和边框回归,以获得更逼近 ground truth boxes 的 bounding boxes)。因为预测层是卷积层,所以RPN会在 feature maps 的每个location都预测出offsets。显然,预测offsets而不是coordinates简化了问题,并且使得网络更容易学习。
作者为了在YOLOv2使用anchor boxes来预测bounding boxes,移除了YOLOv1网络中的全连接层。首先,作者除去了后面的一层pooling layer以便网络的卷积层输出有更高的resolution。同时,作者将输入图像的尺寸由 448*448 缩小到 416*416,这么做是为了在 feature maps 中获得奇数个 locations(448/32=14,426/32=13),从而使 feature maps 中只存在一个 center cell。作者发现图像的 objects,尤其是large objects,往往位于图像的中心。所以在feature maps的中心由一个location预测这些objects要优于4个locations 进行预测。
当使用anchor boxes之后,作者没有使用空间位置对应类别预测的机制,而是为每个anchor box预测 class 和 objectness。与YOLOv1相同,objectness prediction仍然预测ground truth与 proposed box的IOU值;class predictions预测在有object的情况下类的条件概率(是不是没有采用Faster中的做法而是采用了V1的做法)
采用anchor boxes以后虽然在精度上有所损失,但是带来的好处也是明显的。YOLOv1在每幅图像中只预测98个boxes(7*7*2),但是使用anchor boxes之后中间模型(intermediate model)预测出超过一千个boxes。此外,没有使用anchor boxes时中间模型的mAP为69.5,召回率为81%。使用anchor boxes之后,模型的mAP为69.2,召回率为88%。可见,虽然mAP降低了,但是上升的召回率意味着模型还有很大的提升空间。 - Dimension Clusters
作者在使用anchor boxes时遇到两个问题。第一个是box dimensions(anchor boxes的尺寸)是hand picked。网络能够学会适当地调整boxes,但是如果我们为网络找到better priors,那么网络可以更容易地学习预测good detections
在这个问题上作者没有像 Faster RCNN 中那样手动选择 priors,而是使用 k-means clustering 在训练数据集中的 bounding boxes 上自动寻找good priors。作者没有使用标准的k-means(使用Euclidean distance),因为那样会导致 large boxes 比 smaller boxes 产生更多error。考虑到需要的priors应该能够带来good IOU scores,并且独立于size of box,作者就使用了如下的距离度量: 既然使用了k-means来确定priors,那么超参数k的取值必然应该合理地选取。论文中作者尝试了不同取值的k,并且绘制了曲线图来直观表明聚类后各box与最近重心(centroid)的IOU的均值变化,如Fig.2所示:
既然使用了k-means来确定priors,那么超参数k的取值必然应该合理地选取。论文中作者尝试了不同取值的k,并且绘制了曲线图来直观表明聚类后各box与最近重心(centroid)的IOU的均值变化,如Fig.2所示: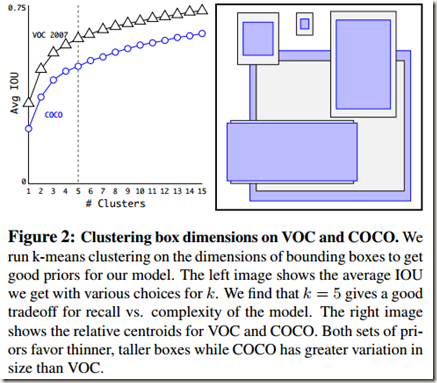 作者在权衡模型复杂度与高召回率之后选择 k=5。通过对比发现,聚类得到的 cluster centriods 与手动精选(hand-picked)的 anchor boxes 有很大不同。聚类得到的 cluster centroids有更少的short,wide boxes,更多的tall,thin boxes。此外,作者还将k-means的聚类结果与hand-picked anchor boxes与数据集中boxes的IOU的均值做了比较,如Table 1所示。从表中可知,在仅有5个priors时,centroids的表现就能与9个anchor boxes类似(平均 IOU 61.0 vs 60.9)。如果使用9个centroids的话,会得到一个高得多的average IOU。这表明,使用k-means来生成边界框意味着使用了更好的表示方式启动模型,并使任务更容易学习
作者在权衡模型复杂度与高召回率之后选择 k=5。通过对比发现,聚类得到的 cluster centriods 与手动精选(hand-picked)的 anchor boxes 有很大不同。聚类得到的 cluster centroids有更少的short,wide boxes,更多的tall,thin boxes。此外,作者还将k-means的聚类结果与hand-picked anchor boxes与数据集中boxes的IOU的均值做了比较,如Table 1所示。从表中可知,在仅有5个priors时,centroids的表现就能与9个anchor boxes类似(平均 IOU 61.0 vs 60.9)。如果使用9个centroids的话,会得到一个高得多的average IOU。这表明,使用k-means来生成边界框意味着使用了更好的表示方式启动模型,并使任务更容易学习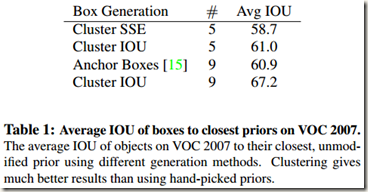
- Direct location prediction
使用anchor boxes时遇到的第二个问题是:model instability,尤其在early iterations期间。大部分不稳定性来自对 (x, y) 位置的预测。基于region proposals的网络预测 tx 和 ty 后按照如下公式计算中心坐标(x, y):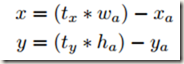 从公式可以看出,如果预测值 tx=1,那么box会向右移动一个anchor box的宽度;如果 tx=-1,那么box会向左移动一个anchor box的宽度。
从公式可以看出,如果预测值 tx=1,那么box会向右移动一个anchor box的宽度;如果 tx=-1,那么box会向左移动一个anchor box的宽度。
该公式是无约束的,所以不管在什么位置预测box,任何一个bounding box可以出现在图像的任何一个位置。在随机初始化的情况下,模型需要耗费很长时间才能稳定地预测到合理地offsets。
上面的公式其实是错误的,应该将减号 “-” 换成 “+”,因为Faster RCNN中对anchor boxes坐标的计算如下,式中 x 是坐标预测值,xa 是anchor boxes的坐标(固定值,feature map中每个位置有9个anchor boxes),x*是坐标真实值(即训练数据的标注信息),其它变量与此类似。t 是偏移量: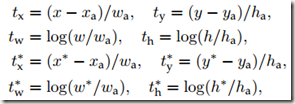
在该论文中,作者没有像Faster RCNN中那样预测boxes相对整幅图像的offsets,而是采用YOLOv1的方法,对boxes坐标相对于所在grid cell的offsets进行预测。这样就将 ground truth 的位置约束到了0-1范围内。但是网络预测到的输出并不一定在0-1范围内,为了解决这个问题作者对网络预测的输出使用了 logistic activation。
网络在输出的feature map中为每个grid cell 预测5个bounding boxes。每个bounding box包含5个坐标,tx,ty,tw,th 和 to。如果某个cell相对于图像左上角的offset是(cx , cy),并且bounding box prior的宽和高为pw,ph,那么网络的预测值计算如下: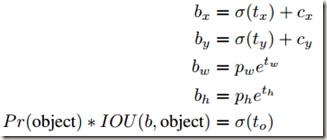 由于对location prediction进行了约束,参数化更容易学习,使得网络更稳定。网络使用dimension clusters和direct location prediction与使用anchor boxes相比,在mAP上提升了5%。
由于对location prediction进行了约束,参数化更容易学习,使得网络更稳定。网络使用dimension clusters和direct location prediction与使用anchor boxes相比,在mAP上提升了5%。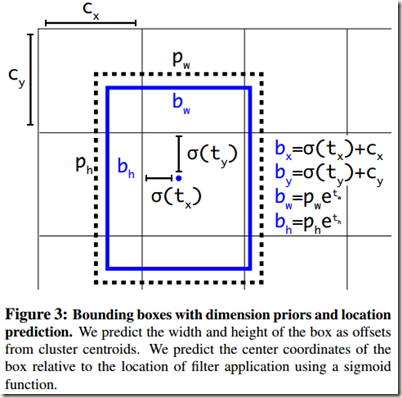
- Fine-Grained Features
修改的YOLO在一个13*13的feature map上进行预测。虽然这足以胜任large objects的检测,但是用上细粒度特征的话,这可能对小尺度的物体检测有帮助。Faster RCNN和SSD都在不同分辨率的feature maps上使用proposal networks。在YOLOv2中,作者使用了一种不同的方法,只需添加一个passthrough layer(转移层)将浅层特征图(分辨率26*26)连接到深层特征图(分辨率13*13)
Passthrough layer将higher resolution features和low resolution features连接起来,连接方式是将相邻的特征堆叠到不同的通道而非空间位置,类似于ResNet中的identity mappings。该方法把26*26*512的feature map转换成13*13*2048的feature map,得到的feature map可以与原始的features相连。YOLOv2的detectors使用的就是经过扩展的feature map,目的是获得更好的 fine grained features。实验表明,该措施能给模型带来1%的性能提升。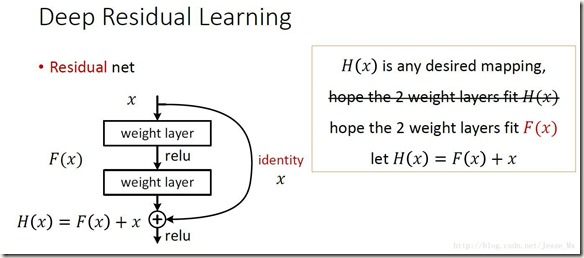 关于passthrough layer,具体来说就是特征重排(不涉及参数学习),前面26*26*512的feature map使用按行和按列隔行采样的方法得到4个新的feature maps,维度都是13*13*512,然后进行连接操作,得到13*13*2048的feature maps,并将其拼接到后面的层,相当于做了一次特征融合,有利于检测小目标。
关于passthrough layer,具体来说就是特征重排(不涉及参数学习),前面26*26*512的feature map使用按行和按列隔行采样的方法得到4个新的feature maps,维度都是13*13*512,然后进行连接操作,得到13*13*2048的feature maps,并将其拼接到后面的层,相当于做了一次特征融合,有利于检测小目标。 - Multi-Scale Training
YOLOv1的输入分辨率为448*448,使用anchor boxes以后作者将分辨率改为416*416(获得center grid cell)。但是,因为我们的模型只使用卷积层和池化层,所以它的输入分辨率可以动态调整(输入图像的尺寸可变化)。作者希望YOLOv2可以鲁棒地检测不同尺寸的images,因此使用了不同分辨率的输入图像训练模型。
训练时作者没有固定输入图像的尺寸,而是每 10 个batchs随机选择一个新的尺寸。因为模型降采样的参数是32,所以随机尺寸在如下32的倍数构成的列表中选择:{320,352,…..,608}。每次更换size相当于将网络resize成另一个dimension,然后继续训练。
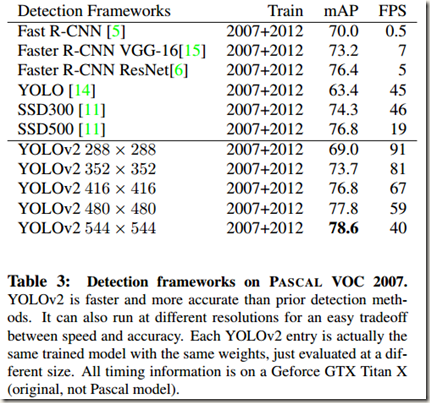
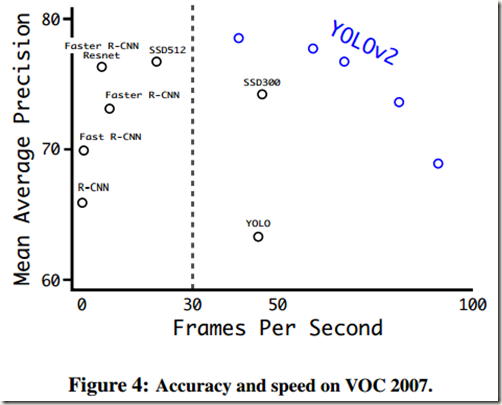
该策略强迫网络学习更好地在不同输入维度上进行预测,这意味着同一个网络可以对不同分辨率的图像进行检测。同时,图像尺寸越小YOLOv2检测速度越快,这为模型在速度与精度之间提供了较为容易控制的平衡。在低分辨率时,v2是一个轻便且精度相当高的detector。在分辨率为288*288时,YOLOv2可以以90FPS的速度运行,且mAP几乎和Fast RCNN一样好。因此,在低分辨率时,V2非常适用于smaller GPUs,高帧率视频或multiple video streams。在高分辨率时,YOLOv2达到了先进水平,在VOC2007数据集上实时运行的同时mAP达到了78.6。从Table 3和Fig.4可见YOLOv2与其他网络在VOC 2007上的比较。
- Further Experiments
作者在VOC 2012上对YOLOv2进行了检测训练。Table 4 展示了YOLOv2与其他先进检测系统之间的性能比较。可见,YOLOv2在运行得比其它方法快很多的情况下mAP依然达到了73.4
作者还在COCO数据集上训练了YOLOv2,并且与其它方法进行了比较,如Table 5所示。在COCO数据集上(IOU=0.5),YOLOv2的mAP达到44.0,与SSD和Faster RCNN相当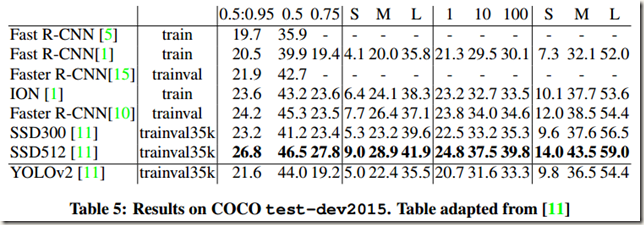
3. Faster
作者希望网络的检测过程不仅精度高而且速度快。因为在大多数检测应用的场景中,比如机器人和自动驾驶,低延迟预测相当重要。为了最大化网络的性能,作者将YOLOv2的基础结构设计得速度很快(意思是使用了速度很快的Darknet-19分类器作为feature extractor)
大多数 detection frameworks 将 VGG-16 作为基础的 feature extractor,这是因为 VGG-16 是一个强大精确的 classification network,但是它的结构比较复杂。此外,VGG-16的卷积层对分辨率为224*224的单幅图像处理时需要进行30.69 billion次浮点运算。
YOLOv1将基于Googlenet architecture自定义的network用做特征提取器。该network比VGG-16快,且在前向传播过程中只使用8.52 billion次运算,但是,它的精度略低于VGG-16
- Darknet-19
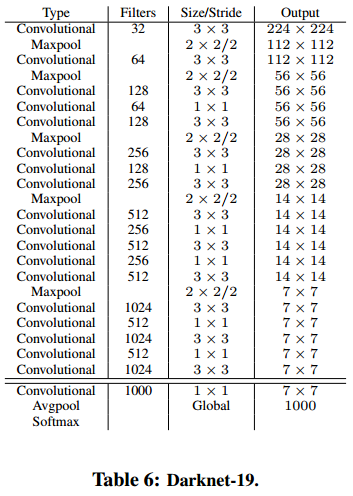
作者提出了一种新的classification model用做YOLOv2的基础,即feature extractor。该classification model的设计参考了前人的设计经验和领域内的基础知识。比如,与VGG models类似,作者主要使用了 3*3 的filters,并且在每个池化操作之后将通道数加倍;参照 Network in Network,作者使用 Global average pooling 进行预测,并且使用 1*1 filters在 3*3 卷积之间压缩特征表示(feature representation);此外,作者还使用 batch normalization来稳定训练过程、加快收敛、规范化模型
最终的 model被称为 Darknet-19,它有19个卷积层和5个最大池化层,具体构成见 Table 6。Darknet-19在处理单幅图像时只需要5.58 billion次运算,但是却能在数据集 ImageNet 上取得 72.9% 的 top-1 accuracy和 91.2% 的 top-5 accuracy
- Training for classification
作者在标准 ImageNet 1000 class classification dataset 上使用梯度下降法训练 YOLOv2 160个epochs,其中初始学习速率为 0.1,多项式速率衰减的幂为4(polynimial rate decay with a power of 4),权重衰减系数为0.0005,动量为0.9,并且使用了Darknet网络。分类训练时作者使用了标准的数据增强技术(Standard data augmentation tricks),包括随机裁剪、旋转和色度(hue)、饱和度(saturation)、曝光度(exposure)偏移
在对分辨率为224*224的输入进行分类训练之后,作者开始在更大尺寸448*448的输入上对网络进行fine tune。这次 fine tune 会训练网络的所有参数,但是只会训练 10 个epochs,微调时学习速率为10e-3。微调完成后,网络在该分辨率的输入上进行分类时 top-1 精度达到76.5%,top-5 精度达到93.3% - Training for detection
第一次fine tune之后对网络结构进行修改,使之执行detection task。具体是将最后一层卷积层删除,然后添加 3 层带1024个filters的3*3卷积层,每层卷积层后面再添加一层1*1的卷积层(filters数目与需要检测的类别数相同,具体见Table 6)。如果使用VOC数据集进行检测训练,那么网络会在每个grid cell 预测5个boxes,每个box又有5个坐标和20个classes,所以需要125 个filters。同时,为了使模型能够使用细粒度特征(Fine grain features),在最后一个3*3*512卷积层和倒数第二个之间添加一层 Passthrough layer
网络结构修改完成以后对模型进行第二次 fine tune。微调共进行160 个epochs,而且在60次和90次的时候,学习率衰减为原来的十分之一。其中,初始学习速率设为 10e-3,权重衰减设为 0.0005,动量设为0.9。同样,训练时也使用了数据增强(Data augmentation),不过与YOLOv1和SSD类似,包括随机裁剪、颜色偏移等。采用的训练策略与在COC和VOC训练时相同。
第二部分:使用数据集结合法和联合训练法训练YOLO9000
4. Stronger
作者提出一种联合分类训练和检测训练的机制,使用该机制可使YOLOv2的检测种类扩充到数千种。这部分内容待必要时再做补充!!!
5. Conclusion
6. 个人总结
- 模型的使用分为train + test两大部分,有很大区别,首先就是Loss
- Faster RCNN中RPN先在卷积层输出的feature maps中的每个位置预测k个achor boxes,然后根据scores及其它操作筛选出 region proposals(由于anchors的尺寸已知,所以此时的region proposals的位置大致已知),最后通过后面的detection network对region proposals进行分类和边框回归,以获得更逼近ground truth boxes的bounding boxes。(从这里可以看出,在Faster RCNN中,RPN使用anchor boxes方法在feature maps上每个位置产生的是k个anchor boxes,经过筛选后的boxes才被称 region proposals,网络进行边框回归得到的是bounding boxes,需要注意名称的不同)
- Faster RCNN中anchor boxes用在RPN网络中,用来生成region proposals ,而YOLOv2用于回归检测
- Faster RCNN中的RPN网络没有将feature maps划分为grid,但使用了人工精选的(Hand-picked)anchor boxes(先验知识)。不过,在feature map的每个位置均预测 k个anchor boxes就相当于对特征图进行了划分。在训练时,需要先根据先验知识为训练集中标注的每个ground-truth box确定与之最匹配(根据IOU)的anchor box,然后将每个ground-truth box的bounding换成与最佳anchor box相同的size。这样处理使得网络在训练时很容易学习边框的定位;
YOLOv1将网络划分为 S*S 的 grid,但是没有使用anchor boxes,只是指定每个cell预测2个bbox。由于缺乏先验知识,在训练时不需要事先为训练集中的 ground-truth boxes寻找最佳anchor并转换成对应的size,只需要预测指定数量的bounding boxes即可;
YOLOv2将网络划分为 S*S 的 grid,并且使用了由 dimension cluster 得到的anchor boxes,指定每个grid cell 预测 k 个bounding boxes。因此,在训练时,需要先根据先验知识为训练集中标注的每个ground-truth box确定与之最匹配(根据IOU)的anchor box,并将每个ground-truth box的 size 换成与最佳anchor box相同的size。由于anchor boxes的尺寸是通过维度聚类得到的,优于人工精选的结果,所以YOLOv2比Faster RCNN更容易学习边框的定位。可见,YOLOv2与Faster RCNN使用的anchor boxes类似,除了anchor boxes在两个网络中的用处不同(RPN 和 回归预测)以外,仅在 grid 大小和 anchor boxes的 size上有区别。
anchor boxes作为先验知识有两方面的信息(个数,尺寸。Faster RCNN的尺寸是人工精选的,YOLOv2是维度聚类得到的):一是每个cell预测的bboxes的个数与anchors的个数一致;二是在训练时将原始数据中的ground-truth boxes调整到与anchors匹配的尺寸,这只是为了training更容易。另外,在inference(训练的正向过程)和test(模型训练结束后进行的测试过程)时不会使用尺寸信息,输出的是预测出的bounding boxes坐标 - YOLOv2没有像Faster RCNN那样预测bounding boxes相对整幅图像的offsets,而是采用YOLOv1的方法,对boxes坐标相对于所在grid cell的offsets进行预测
参考资料
目标检测(六)YOLOv2__YOLO9000: Better, Faster, Stronger的更多相关文章
- 目标检测(四)Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
作者:Shaoqing Ren, Kaiming He, Ross Girshick, and Jian Sun SPPnet.Fast R-CNN等目标检测算法已经大幅降低了目标检测网络的运行时间. ...
- [目标检测] 从 R-CNN 到 Faster R-CNN
R-CNN 创新点 经典的目标检测算法使用滑动窗法依次判断所有可能的区域,提取人工设定的特征(HOG,SIFT).本文则预先提取一系列较可能是物体的候选区域,之后仅在这些候选区域上用深度网络提取特征, ...
- 目标检测论文解读4——Faster R-CNN
背景 Fast R-CNN中的region proposal阶段所采用的SS算法成为了检测网络的速度瓶颈,本文是在Fast R-CNN基础上采用RPN(Region Proposal Networks ...
- 第三十一节,目标检测算法之 Faster R-CNN算法详解
Ren, Shaoqing, et al. “Faster R-CNN: Towards real-time object detection with region proposal network ...
- 基于深度学习的目标检测算法:SSD——常见的目标检测算法
from:https://blog.csdn.net/u013989576/article/details/73439202 问题引入: 目前,常见的目标检测算法,如Faster R-CNN,存在着速 ...
- Anchor-free目标检测综述 -- Keypoint-based篇
早期目标检测研究以anchor-based为主,设定初始anchor,预测anchor的修正值,分为two-stage目标检测与one-stage目标检测,分别以Faster R-CNN和SSD作 ...
- Anchor-free目标检测综述 -- Dense Prediction篇
早期目标检测研究以anchor-based为主,设定初始anchor,预测anchor的修正值,分为two-stage目标检测与one-stage目标检测,分别以Faster R-CNN和SSD作 ...
- AI佳作解读系列(二)——目标检测AI算法集杂谈:R-CNN,faster R-CNN,yolo,SSD,yoloV2,yoloV3
1 引言 深度学习目前已经应用到了各个领域,应用场景大体分为三类:物体识别,目标检测,自然语言处理.本文着重与分析目标检测领域的深度学习方法,对其中的经典模型框架进行深入分析. 目标检测可以理解为是物 ...
- 论文笔记:目标检测算法(R-CNN,Fast R-CNN,Faster R-CNN,FPN,YOLOv1-v3)
R-CNN(Region-based CNN) motivation:之前的视觉任务大多数考虑使用SIFT和HOG特征,而近年来CNN和ImageNet的出现使得图像分类问题取得重大突破,那么这方面的 ...
随机推荐
- Python读取本地文档内容并发送邮件
当需要将本地某个路径下的文档内容读取后并作为邮件正文发送的时候可以参考该文,使用到的模块包括smtplib,email. #! /usr/bin/env python3 # -*- coding:ut ...
- Source Insight小技巧:修改Symbol Window的默认宽度
SI是个好东西,但是源代码窗口左边的符号窗口的默认宽度实在是太小,每次打开一个新的源码窗口都要重新拖放调整,很烦人.下面是一劳永逸调整Symbol Window宽度的方法. 打开一个源码窗口,将Sym ...
- 如何让eclipse恢复默认布局
https://blog.csdn.net/howlaa/article/details/39178359 ********************************************** ...
- 从零开始搭建FAQ引擎--深度语义匹配
从零开始搭建FAQ引擎--深度语义匹配
- JavaScript 字符串与json对象互转的几种方法
第一种:浏览器支持的转换方式(Firefox,chrome,opera,safari,ie)等浏览器: JSON.parse(jsonstr); //可以将json字符串转换成json对象 JSON. ...
- 鼠标交互插件threex.domevents介绍
threex.domevents是一个three.js的扩展库,支持3D场景的交互.和我们操作DOM树的事件相似,名称都是一样的.所以使用起来非常方便.另外他也提供了连接操作.单击网格可实现跳转功能. ...
- 同时执行多个$.getJSON() 数据混乱的问题的解决
在执行之前加$.ajaxSettings.async = false; (同步执行)执行你的代码之后及时恢复为$.ajaxSettings.async = true: (异步执行)不然影响别的地方的需 ...
- HTTP Headers 信息
点开一个条目,可以查看请求的详细信息: General —— 通用信息 Request URL:请求的URL Request Method:请求的方法 Status Code:响应状态 ...
- Java API获取consumer group最新提交位移的时间
碰到了有人问起这个问题,目前java consumer没有利用OffsetAndMetadata中的metadata字段记录提交的时间,故直接通过java consumer来查询是不行,我们需要直接读 ...
- docker必须要sudo,但是sudo的话,又获得不了环境变量怎么办?
方法1 sudo usermod -a -G docker $USER 方法2 sudo -E docker-compose ... 在sudo后面加上-E