寻路算法之A*算法详解
前言
在实际开发中我们会经常用到寻路算法,例如MMOARPG游戏魔兽中,里面的人物行走为了模仿真实人物行走的体验,会选择最近路线达到目的地,期间会避开高山或者湖水,绕过箱子或者树林,直到走到你所选定的目的地。这种人类理所当然的行为,在计算机中却需要特殊的算法去实现,常用的寻路算法主要有宽度最优搜索[1]、Dijkstra算法、贪心算法、A*搜索算法、B*搜索算法[2]、导航网格算法、JPS算法[3]等,学习这些算法的过程就是不断抽象人类寻路决策的过程。本文主要以一个简单空间寻路为例,对A*算法进行分析实现。
介绍
A*(A-Star)算法是一种静态路网中求解最短路径最有效的直接搜索方法,也是解决许多搜索问题的常用启发式算法,算法中的距离估算值与实际值越接近,最终搜索速度越快。之后涌现了很多预处理算法(如ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。
问题
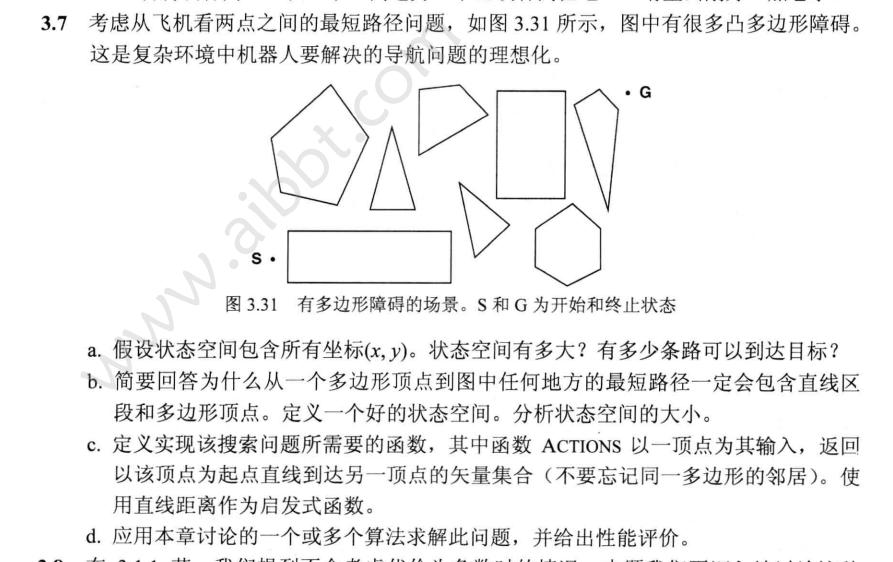
在包含很多凸多边形障碍的空间里,解决从起始点到终点的机器人导航问题。
步骤
地图预处理
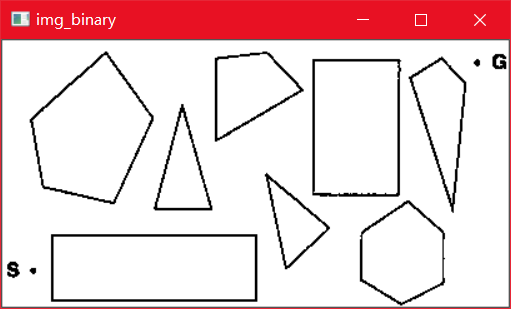
题中寻路地图包含在很多文字之中,且图中还包含logo,这都直接影响了寻路算法的使用,因此需要[将图片转程序易处理的数据结构]({{< ref "algorithm/image_to_data.md" >}})。预处理后地图如下:
算法思想
A*算法为了在获得最短路径的前提下搜索最少节点,通过不断计算当前节点的附近节点F(N)值来判断下次探索的方向,每个节点的值计算方法为:F(N)=G(N)+H(N)。
其中G(N)是从起点到当前节点N的移动消耗(比如低消耗代表平地、高消耗代表沙漠);H(N)代表当前节点到目标节点的预期距离,可以用使用曼哈顿距离、欧氏距离等。当节点间移动消耗G(N)非常小时,G(N)对F(N)的影响也会微乎其微,A*算法就退化为最好优先贪婪算法;当节点间移动消耗G(N)非常大以至于H(N)对F(N)的影响微乎其微时,A*算法就退化为Dijkstra算法。
算法步骤
整个算法流程为[4]:
- 设定两个集合:open集、close集
- 将起始点加入open集,其F值为0(设置父亲节点为空)
- 当open集合非空,则执行以下循环
3.1 在open集中移出一个F值最小的节点作为当前节点,并将其加入close集
3.2 如果当前节点为终点,则退出循环完成任务
3.3 处理当前节点的所有邻居节点,对于每个节点进行以下操作:
- 如果该节点不可达或在close集中则忽略该节点
- 计算该节点的F(N)值,并:如果该节点在open集中且F(N)大于当前F(N),则选择较小F(N)替换;否则将该节点加入open集
- 将该节点的父节点设置为当前节点
- 将该节点加入open集 - 搜索结束如果open集为空,则可能搜索到一条路径;如果open集非空,则必然搜索到一条路径,从终点不断遍历其父节点便是搜索路径。
代码实现
使用Python编写A*算法的核心代码为:
class AStar(object):
'''
@param {*} graph 地图
@param {*} start 开始节点
@param {*} goal 终点
'''
def __init__(self, graph, start, goal):
self.start = start
self.goal = goal
self.graph = graph
# 优先队列储存open集
self.frontier = PriorityQueue()
# 初始化起点
self.frontier.put(start)
'''
@description: 绘出最终路径
'''
def draw_path(self):
path = self.goal
matrix = self.graph.matrix
while path:
matrix[path.x][path.y] = 0
path = path.father
def run(self):
plt.ion()
n = 0
while not self.frontier.empty():
n = n + 1
current = self.frontier.get()
# 是否为终点
if current.equal(self.goal):
self.goal.father = current
self.draw_path()
return True
# 遍历邻居节点
for next in self.graph.neighbors(current):
# 计算移动消耗G
next.g = current.g + self.graph.cost(current, next)
# 计算曼哈顿距离H
next.manhattan(self.goal)
# 如果当前节点未在open集中
if not next.used:
next.used = True
# 将探索过的节点设为阴影,便于观察
self.graph.matrix[next.x][next.y] = 99
# 将当前节点加入open集
self.frontier.put(next)
# 设置该节点的父节点为当前节点
next.father = current
# 没100次更新一次图像
if n % 100 == 0:
plt.clf()
plt.imshow(self.graph.matrix)
plt.pause(0.01)
plt.show()
return False
寻路结果如下(其中黑实线是算法得出的最优路径,路径旁边的黑色地带是探索过的节点):

思考
本例中图像共有406×220像素,即有89320个像素点,也就是状态空间共有89320,可选线路最高有893202约为80亿种,虽然经过了简单的地图优化处理,但直接使用A*算法的效率还是很低。要想进一步提高搜索效率,可以引出另外一条定理:给定平面上一个起始点s和一个目标点g,以及若干多边形障碍物P1, P2, P3 ... Pk,由于两点间直线最短,故在所有从s到g的路径中,距离最短的路径的拐点一定在多边形顶点上。基于以上定理,我们可以人工将地图中的多边形顶点进行提取,再用A*算法对提取的顶点进行计算,即可在获得最短路径的同时大大增加了算法的效率。
完整代码
- 数据结构
from queue import PriorityQueue
import cv2
import math
import matplotlib.pyplot as plt
import fire
class Node(object):
def __init__(self, x=0, y=0, v=0, g=0, h=0):
self.x = x
self.y = y
self.v = v
self.g = g #g值
self.h = h #h值
self.used = False
self.father = None #父节点
'''
@description: 曼哈顿距离
@param {*} endNode 目标节点
'''
def manhattan(self, endNode):
self.h = (abs(endNode.x - self.x) + abs(endNode.y - self.y)) * 10
'''
@description: 欧拉距离
@param {*} self
@param {*} endNode
@return {*}
'''
def euclidean(self, endNode):
self.h = int(math.sqrt(abs(endNode.x - self.x)**2 + abs(endNode.y - self.y)**2)) * 30
'''
@description: 判断other节点与当前节点是否相等
@param {*} other
'''
def equal(self, other):
if self.x == other.x and self.y == other.y:
return True
else:
return False
'''
@description: 函数重载,为了满足PriorityQueue进行排序
@param {*} other
'''
def __lt__(self, other):
if self.h + self.g <= other.h + other.g:
return True
else:
return False
class Graph(object):
'''
@description: 类初始化
@param {*} matrix 地图矩阵
@param {*} maxW 地图宽
@param {*} maxH 地图高
'''
def __init__(self, matrix, maxW, maxH):
self.matrix = matrix
self.maxW = maxW
self.maxH = maxH
self.nodes = []
# 普通二维矩阵转一维坐标矩阵
for i in range(maxH):
for j in range(maxW):
self.nodes.append(Node(i, j, self.matrix[i][j]))
'''
@description: 检查坐标是否合法
@param {*} x
@param {*} y
'''
def checkPosition(self, x, y):
return x > 0 and x < self.maxH and y > 0 and y < self.maxW and self.nodes[x * self.maxW + y].v > 200
'''
@description: 寻找当前节点的邻居节点
@param {Node} node 当前节点
@return {*}
'''
def neighbors(self, node: Node):
ng = []
if self.checkPosition(node.x - 1, node.y):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y])
if self.checkPosition(node.x + 1, node.y):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y])
if self.checkPosition(node.x, node.y - 1):
ng.append(self.nodes[node.x * self.maxW + node.y - 1])
if self.checkPosition(node.x, node.y + 1):
ng.append(self.nodes[node.x * self.maxW + node.y + 1])
if self.checkPosition(node.x + 1, node.y + 1):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y + 1])
if self.checkPosition(node.x + 1, node.y - 1):
ng.append(self.nodes[(node.x + 1) * self.maxW + node.y - 1])
if self.checkPosition(node.x - 1, node.y + 1):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y + 1])
if self.checkPosition(node.x - 1, node.y - 1):
ng.append(self.nodes[(node.x - 1) * self.maxW + node.y - 1])
return ng
'''
@description: 画出结果路径
'''
def draw(self):
cv2.imshow('result', self.matrix)
cv2.waitKey(0)
cv2.destroyAllWindows()
'''
@description: 计算节点间移动消耗
@param {Node} current
@param {Node} next
@return {*}
'''
def cost(self, current: Node, next: Node):
return 11 if abs(current.x - next.x) + abs(current.y - next.y) > 1 else 10
class AStar(object):
'''
@param {*} graph 地图\n
@param {*} start 开始节点
@param {*} goal 终点
'''
def __init__(self, graph, start, goal):
self.start = start
self.goal = goal
self.graph = graph
# 优先队列储存open集
self.frontier = PriorityQueue()
# 初始化起点
self.frontier.put(start)
'''
@description: 绘出最终路径
'''
def draw_path(self):
path = self.goal
matrix = self.graph.matrix
while path:
matrix[path.x][path.y] = 0
path = path.father
def run(self):
plt.ion()
n = 0
while not self.frontier.empty():
n = n + 1
current = self.frontier.get()
# 是否为终点
if current.equal(self.goal):
self.goal.father = current
self.draw_path()
return True
# 遍历邻居节点
for next in self.graph.neighbors(current):
# 计算移动消耗G
next.g = current.g + self.graph.cost(current, next)
# 计算曼哈顿距离H
next.manhattan(self.goal)
# 如果当前节点未在open集中
if not next.used:
next.used = True
# 将探索过的节点设为阴影,便于观察
self.graph.matrix[next.x][next.y] = 99
# 将当前节点加入open集
self.frontier.put(next)
# 设置该节点的父节点为当前节点
next.father = current
# 没100次更新一次图像
if n % 100 == 0:
plt.clf()
plt.imshow(self.graph.matrix)
plt.pause(0.01)
plt.show()
return False
- 主程序
import cv2
from AStar import Node, AStar, Graph
src_path = "./map.png"
# 读取图片
img_grey = cv2.imread(src_path, cv2.IMREAD_GRAYSCALE)
# 去除水印
img_grey = cv2.threshold(img_grey, 200, 255, cv2.THRESH_BINARY)[1]
# 二值化
img_binary = cv2.threshold(img_grey, 128, 255, cv2.THRESH_BINARY)[1]
img_binary[:][0] = 0
img_binary[:][-1] = 0
img_binary[0][:] = 0
img_binary[-1][:] = 0
start = Node(180, 30)
goal = Node(20, 370)
maxH, maxW = img_binary.shape
graph = Graph(img_binary, maxW, maxH)
astar = AStar(graph, start, goal)
astar.run()
cv2.imshow('result', graph.matrix)
cv2.waitKey(0)
cv2.destroyAllWindows()
参考文献
wier. 深入理解游戏中寻路算法. OSChina. [2017-07-25] ︎
云加社区. 最快速的寻路算法 Jump Point Search. InfoQ. [2020-11-29] ︎
Amit Patel. Introduction to the A* Algorithm. redblobgames.com. [2014-05-26] ︎
寻路算法之A*算法详解的更多相关文章
- SSD算法及Caffe代码详解(最详细版本)
SSD(single shot multibox detector)算法及Caffe代码详解 https://blog.csdn.net/u014380165/article/details/7282 ...
- python 排序算法总结及实例详解
python 排序算法总结及实例详解 这篇文章主要介绍了python排序算法总结及实例详解的相关资料,需要的朋友可以参考下 总结了一下常见集中排序的算法 排序算法总结及实例详解"> 归 ...
- 关联规则算法(The Apriori algorithm)详解
一.前言 在学习The Apriori algorithm算法时,参考了多篇博客和一篇论文,尽管这些都是很优秀的文章,但是并没有一篇文章详解了算法的整个流程,故整理多篇文章,并加入自己的一些注解,有了 ...
- SSD(single shot multibox detector)算法及Caffe代码详解[转]
转自:AI之路 这篇博客主要介绍SSD算法,该算法是最近一年比较优秀的object detection算法,主要特点在于采用了特征融合. 论文:SSD single shot multibox det ...
- 算法笔记--sg函数详解及其模板
算法笔记 参考资料:https://wenku.baidu.com/view/25540742a8956bec0975e3a8.html sg函数大神详解:http://blog.csdn.net/l ...
- Floyd算法(三)之 Java详解
前面分别通过C和C++实现了弗洛伊德算法,本文介绍弗洛伊德算法的Java实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3. 弗洛伊德算法的代码说明 4. 弗洛伊德算法的源码 转载请注明 ...
- Floyd算法(二)之 C++详解
本章是弗洛伊德算法的C++实现. 目录 1. 弗洛伊德算法介绍 2. 弗洛伊德算法图解 3. 弗洛伊德算法的代码说明 4. 弗洛伊德算法的源码 转载请注明出处:http://www.cnblogs.c ...
- KMP算法的优化与详解
文章开头,我首先抄录一些阮一峰先生关于KMP算法的一些讲解. 下面,我用自己的语言,试图写一篇比较好懂的 KMP 算法解释. 1. 首先,字符串"BBC ABCDAB ABCDABCDABD ...
- Partition算法以及其应用详解上(Golang实现)
最近像在看闲书一样在看一本<啊哈!算法> 当时在amazon上面闲逛挑书,看到巨多人推荐这本算法书,说深入浅出简单易懂便买来阅读.实际上作者描述算法的能力的确令人佩服.就当复习常用算法吧. ...
- Dijkstra算法(二)之 C++详解
本章是迪杰斯特拉算法的C++实现. 目录 1. 迪杰斯特拉算法介绍 2. 迪杰斯特拉算法图解 3. 迪杰斯特拉算法的代码说明 4. 迪杰斯特拉算法的源码 转载请注明出处:http://www.cnbl ...
随机推荐
- Spring 初始化流程
开始 在SpringIOC中,前面讲述了如何配置BeanDefinition和如何注册BeanDefinition,但是这些知识容器初始化的一部分,在AbstractApplicationContex ...
- Ubuntu20.04.3中telnet 127.0.0.1时Unable to connect to remote host: Connection refused
本博客旨在自我学习使用,如有任何疑问请及时联系博主 今天遇到个稀奇古怪的问题: 调试emqx的时候一直econnrefused,检查服务时,突然发现在ubuntu上telnet localhost竟然 ...
- 记录一次elasticsearch-5.6.4宕机排查经历
犯罪现场~~ es: 三节点,配置相同 内存: 248G CPU: 没注意看 磁盘: 2T data: 380G左右 indices: 近9800条 在下才疏学浅,目前跟着大佬学习,这个问题还没解决, ...
- .NET CORE 鉴权
基础信息 1.什么是鉴权授权? 鉴权是验证用户是否拥有访问系统的权利,授权是判断用户是否有权限做一些其他操作. 2.传统的Session 和Cookie 主要用于无状态请求下的的用户身份识别,只不过S ...
- Spring Boot run()方法剖析
Spring Boot自动配置部分重点介绍了相关注解,关于main中调用的run方法并没有阐述过.run方法的作用是什么呢?只有注解没有main里的run方法Spring Boot工程就好比身体个方面 ...
- SIMD编码/解码
在看SEAL库和HElib库中经常在编码中碰到打包(batch)技术,另外还提到了SIMD编码技术,有点困惑,编码.打包.SIMD到底有什么关系? 编码 在CKKS方案中,因为明文空间在复数域上,简单 ...
- WPF中TabControl控件和ListBox控件的简单应用(MVVM)
本文主要实现下图所示的应用场景: 对于Class1页,会显示用户的age和address属性,对于Class2页,会显示用户的age,address和sex属性.在左边的ListBox中选择对应的用户 ...
- 不知道这10个术语,你还敢说会JavaScript?
每个行业,都有业内"行话",不了解这些行话的人,很难融入到行业中,也永远装不了逼. 从Curry到Closes,有很多JavaScript行话(该领域中使用的特殊词汇)知道这些行话 ...
- Java课程设计---安装Mysql及管理工具
1.安装mysql 没有安装包的可以在这个地址下载:https://dev.mysql.com/downloads/mysql/5.5.html 双击提供的安装包 (安装路径可以不用更改) 在弹出的窗 ...
- WPS:多组件模式与整合模式的调节
首页 设置中心 切换窗口管理模式 多组件和整合模式