Reinforcement Learning: An Introduction读书笔记(3)--finite MDPs
> 目 录 <
- Agent–Environment Interface
- Goals and Rewards
- Returns and Episodes
- Policies and Value Functions
- Optimal Policies and Optimal Value Functions
> 笔 记 <
Agent–Environment Interface
MDPs are meant to be a straightforward framing of the problem of learning from interaction to achieve a goal. The learner and decision maker is called the agent. The thing it interacts with, comprising everything outside the agent, is called the environment. These interact continually, the agent selecting actions and the environment responding to these actions and presenting new situations to the agent.1 The environment also gives rise to rewards, special numerical values that the agent seeks to maximize over time through its choice of actions.
More specifcally, the agent and environment interact at each of a sequence of discrete time steps, t = 0,1,2,.... At each time step t, the agent receives some representation of the environment's state, $S_{t}\in S$, where $S$ is the set of possible states, and on that basis selects an action, $A_{t}\in A(S_{t})$, where $A(S_{t})$ is the set of actions available in state $S_{t}$. One time step later, in part as a consequence of its action, the agent receives a numerical reward, $R_{t+1}\in R \subset \mathbb{R}$, and finds itself in a new state, $S_{t+1}$.
At each time step, the agent implements a mapping from states to probabilities of selecting each possible action. This mapping is called the agent's policy and is denoted $\pi_{t}(a|s)$ is the probability that $A_{t}=a$ if $S_{t}=s$. Reinforcement learning methods specify how the agent changes its policy as a result of its experience. The agent's goal, roughly speaking, is to maximize the total amount of reward it receives over the long run.
the actions are the choices made by the agent; the states are the basis for making the choices; and the rewards are the basis for evaluating the choices.
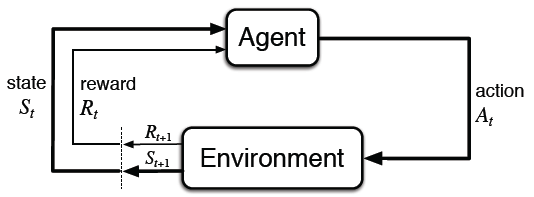
图1. agent-environment interaction in a MDP
马尔可夫性(Markov property): 如果state signal具有马尔科夫性,那么当前状态只跟上一状态有关,它包含了所有从过去经历中得到的信息。马尔可夫性对RL而言很重要,∵decisions和values通常都被认为是一个只跟当前state相关的函数。
MDP的动态性:$p(s',r|s,a)=Pr\left \{ S_{t}=s',R_{t}=r|S_{t-1}=s,A_{t-1}=a \right \}$,
where $ \underset{s'\in S \ r\in R}{\sum \sum}p(s',r|s,a)=1 $, for all $s\in S$, $a\in A(s)$.
基于the dynamics of the MDP, 我们可以很容易地得到状态转移概率(state-transition probabilities, $p(s'|s,a)$),state-action的期望回报(the expected rewards for state–action pairs, $r(s,a)$),以及state-action-next state的期望回报(the expected rewards for state–action-next state, $r(s,a,s')$)。
Goals and Rewards
agent的goal是以一个从environment传递给agent的reward signal的形式存在的。我们通过定义reward signal的值,可以实现跟agent的交流,告诉它what you want it to achieve, not how you want it achieved。
Agent的目标是最大化total reward。因此,最大化的不是immediate reward,而是cumulative reward in the long run。
Returns and Episodes
The return is the function of future rewards that the agent seeks to maximize (in expected value). return有多种形式,取决于task本身和是否希望对回报进行折扣。
Expected return: $G_{t}=R_{t+1}+R_{t+2}+...+R_{T}$, where T is a final time step。适合于episodic tasks。
Episodic tasks: each episode ends in the terminal state, followed by a reset to a standard starting state or a sample from a standard distribution of starting states.
Continuing tasks: the agent–environment interaction doesn’t break naturally into identifiable episodes, but goes on continually without limit.
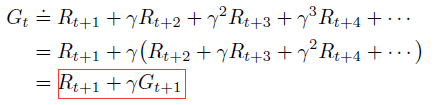
Expected discounted return: $G_{t}=R_{t+1}+\gamma R_{t+2}+ \gamma ^{2}R_{t+3}+...=\sum_{k=0}^{\infty}\gamma ^{k}R_{t+k+1}$。其中,折扣率(discount rate, $\gamma$)决定了未来rewards的当前价值。适合于continuing tasks。
Policies and Value Functions
Value functions: functions of states (or state-action pairs) that estimate how good it is for the agent to be in a given state (or how good it is to perform a given action in a given state). The notion of “how good” here is defined in terms of future rewards that can be expected, or, in terms of the expected return from that state (or state-action pair).
Policy: a mapping from states to probabilities of selecting each possible action. If the agent is following policy $\pi$ at time t, then $\pi(a|s)$ is the probability that $A_{t} = a$ if $S_{t} = s$.
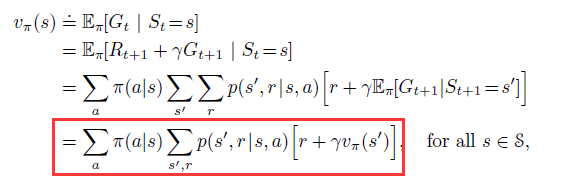
the value function of a state s under a policy $\pi$: (i.e. the expected return when starting in s and following $\pi$ thereafter)
We call the function $ v_{\pi}$ is the state-value function for policy $\pi$
the value of taking action a in state s under a policy $\pi$: (i.e. the expected return starting from s, taking the action a, and thereafter following policy $\pi$)
We call $ q_{\pi}$ the action-value function for policy $\pi$
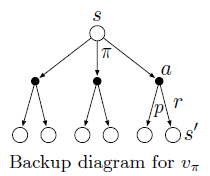
Bellman equation for $v_{\pi}$: It expresses a relationship between the value of a state and the values of its successor states.
Optimal Policies and Optimal Value Functions
Value functions define a partial ordering over policies. $\pi> \pi'$ if and only if $v_{\pi}(s) > v_{\pi'}(s)$, for all $s \in S$. The optimal value functions assign to each state, or state–action pair, the largest expected return achievable by any policy.
Optimal policy $\pi_{*}$:A policy whose value functions are optimal. There is always at least one (can be many) policy that is better than or equal to all other policies.
Optimal state-value function:
Optimal action-value function:
用$v_{*}$来表示$q_{*}$:
Any policy that is greedy with respect to the optimal value functions must be an optimal policy. The Bellman optimality equations are special consistency conditions that the optimal value functions must satisfy and that can, in principle, be solved for the optimal value functions.
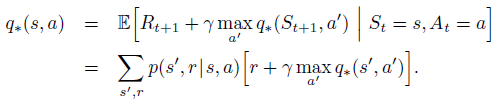
Bellman optimality equation for $v_{*}$:
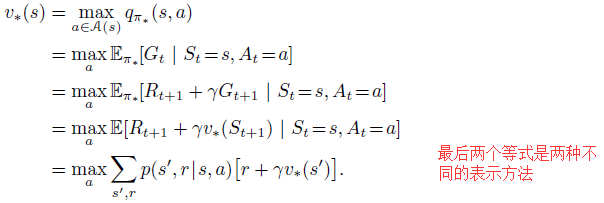
Bellman optimality equation for $q_{*}$:
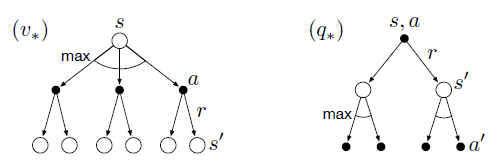
Backup diagrams for $v_{*}$ and $q_{*}$:
Reinforcement Learning: An Introduction读书笔记(3)--finite MDPs的更多相关文章
- Reinforcement Learning: An Introduction读书笔记(4)--动态规划
> 目 录 < Dynamic programming Policy Evaluation (Prediction) Policy Improvement Policy Iterat ...
- Reinforcement Learning: An Introduction读书笔记(1)--Introduction
> 目 录 < learning & intelligence 的基本思想 RL的定义.特点.四要素 与其他learning methods.evolutionary m ...
- Reinforcement Learning: An Introduction读书笔记(2)--多臂机
> 目 录 < k-armed bandit problem Incremental Implementation Tracking a Nonstationary Problem ...
- 《Machine Learning Yearing》读书笔记
——深度学习的建模.调参思路整合. 写在前面 最近偶尔从师兄那里获取到了吴恩达教授的新书<Machine Learning Yearing>(手稿),该书主要分享了神经网络建模.训练.调节 ...
- Machine Learning for hackers读书笔记(六)正则化:文本回归
data<-'F:\\learning\\ML_for_Hackers\\ML_for_Hackers-master\\06-Regularization\\data\\' ranks < ...
- Machine Learning for hackers读书笔记(三)分类:垃圾邮件过滤
#定义函数,打开每一个文件,找到空行,将空行后的文本返回为一个字符串向量,该向量只有一个元素,就是空行之后的所有文本拼接之后的字符串 #很多邮件都包含了非ASCII字符,因此设为latin1就可以读取 ...
- Machine Learning for hackers读书笔记_一句很重要的话
为了培养一个机器学习领域专家那样的直觉,最好的办法就是,对你遇到的每一个机器学习问题,把所有的算法试个遍,直到有一天,你凭直觉就知道某些算法行不通.
- Machine Learning for hackers读书笔记(十二)模型比较
library('ggplot2')df <- read.csv('G:\\dataguru\\ML_for_Hackers\\ML_for_Hackers-master\\12-Model_C ...
- Machine Learning for hackers读书笔记(十)KNN:推荐系统
#一,自己写KNN df<-read.csv('G:\\dataguru\\ML_for_Hackers\\ML_for_Hackers-master\\10-Recommendations\\ ...
随机推荐
- 201671010147 2017年8月27号 初学java的感想
在IT行业中,java无疑是最热门的,很多企业也青睐java,因为他的扩展性好,可以处理更多客户的数据,正是因为java有前景所以才吸引更多人去学习.在大一我们已经接触vhleC语言,大二开始就解除了 ...
- Web browse的发展演变
Web browse 译为中文是网络浏览器或网页浏览器. Web浏览器如今可谓遍地开花,无论你最终选择了什么浏览器,你可能都会举得他们的功能性想当然的,但是你们可能不知道这些Web浏览器是20年发展的 ...
- VSCode插件开发全攻略(七)WebView
更多文章请戳VSCode插件开发全攻略系列目录导航. 什么是Webview 大家都知道,整个VSCode编辑器就是一张大的网页,其实,我们还可以在Visual Studio Code中创建完全自定义的 ...
- java 静态变量 静态代码块 加载顺序问题
在网上看了一个这样的题目 public class StaticTest { public static void main(String[] args) { staticFunction(); } ...
- 【java】java反射初探 ——“当类也学会照镜子”
反射的作用 开门见山地说说反射的作用 1.为我们提供了全面的分析类信息的能力 2.动态加载类 我理解的“反射”的意义 (仅个人理解哈) 我理解的java反射机制就是: 提供一套完善而强 ...
- 工作了才发现display全忘了
CSS display属性这几天用的我头疼 人老了 健忘了 1.inline(行内元素) 是元素变成行内元素,拥有行内元素特性,共享属性,不会吃独食! 共享经济时代 inline是主导大哥 !impo ...
- Java开发瓶颈,Dubbo架构学习整理
作者:butterfly100 一. Dubbo诞生背景 随着互联网的发展和网站规模的扩大,系统架构也从单点的垂直结构往分布式服务架构演进,如下图所示: 单一应用架构:一个应用部署所有功能,此时简化C ...
- C#中四步轻松使用log4net记录本地日志(WPF有点小区别)
在这里,记录我在项目中使用log4net记录本地日志的步骤.在不会之前感觉很难,很神秘,一旦会了之后其实没那么难.其实所有的事情都是一样的,下面我就分享一下我使用log4Net的经验. 第一步:首先从 ...
- 《http权威指南》读书笔记9
概述 最近对http很感兴趣,于是开始看<http权威指南>.别人都说这本书有点老了,而且内容太多.我个人觉得这本书写的太好了,非常长知识,让你知道关于http的很多概念,不仅告诉你怎么做 ...
- 简单读!spring-mvc源码之url的暴露之路
spring中,注册controller的url有多种方式: 1. 你可以啥都不都干,直接使用 @RequestMapping 注解上体路径,然后加上 <component-scan>, ...