视觉目标跟踪算法——SRDCF算法解读
首先看下MD大神2015年ICCV论文:Martin Danelljan, Gustav Häger, Fahad Khan, Michael Felsberg. "Learning Spatially Regularized Correlation Filters for Visual Tracking." ICCV (2015).
【code: https://www.cvl.isy.liu.se/research/objrec/visualtracking/regvistrack/】
一、相关滤波跟踪算法原理回顾
相关跟踪的核心就是滤波器filters的求解,从MOSSE到KCF再到SRDCF,滤波器的模型越来越复杂,计算速度越来越慢,使得相关滤波在计算速度上的优势越来越不明显。
如上述公式所示,我们希望找到一个滤波器模板,可将样本进行滤波操作,得到响应结果,通过响应就能找到跟踪目标所在位置。因此问题就在怎么找到这个滤波器。转换成数学的线性规划或者二分类问题,就是求解高维映射下的岭回归问题。
二、存在问题
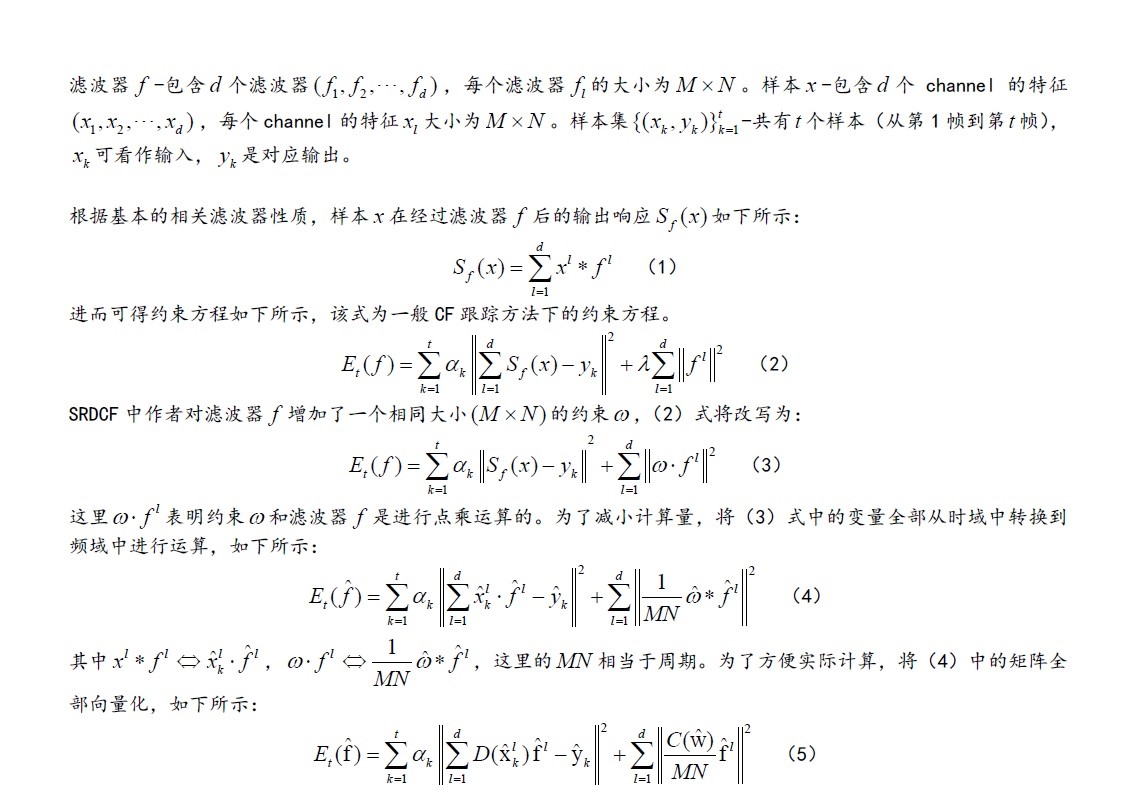
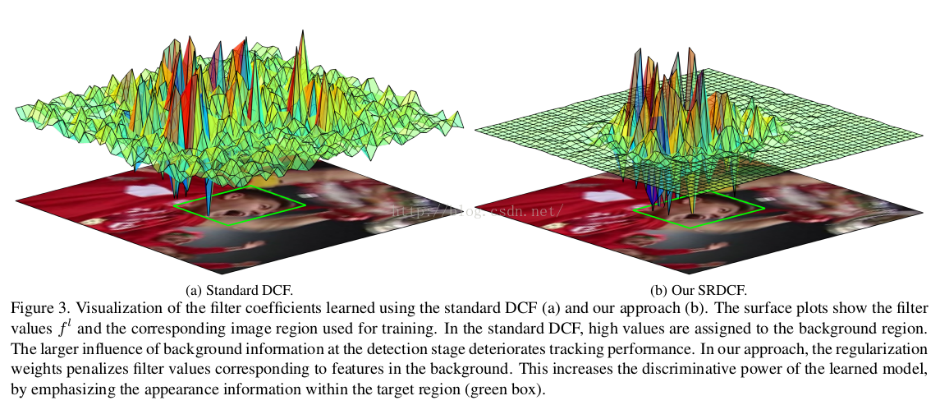
传统的相关滤波方法,通过滤波器求解响应最高位置,即为跟踪目标所在位置,公式求解通过傅里叶变换转到频率域可极大简化运算速度,甚至实现算法的实时性。但在傅里叶变换过程中,会将处理的图像窗口边缘进行循环拼接,这就导致边缘处不连续,便产生边缘效应。
三、SRDCF解决思路
主要贡献:
1、在KCF/DCF基础上改善了boundary effects,加入惩罚项[spatial
regularization function that penalizes(惩罚) filter
coefficients residing outside the target region].
2、不同的scale搜索,处理尺度的问题(暴力的分为指定个尺度,依次匹配)。
3、在求解corelation filters时,利用iterative Gauss-Seidel method在线学习。
4、融合多种特征:利用HOG(31维特征)和CN(11维特征)共计42维特征。
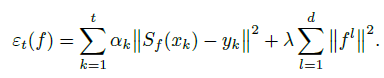
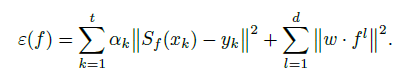
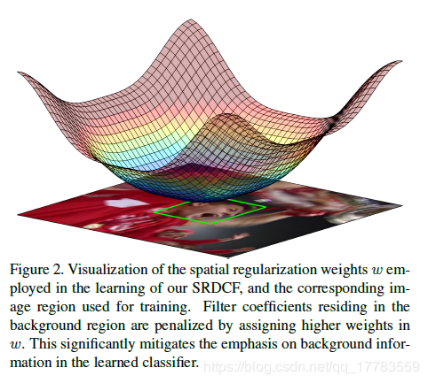
主要在于第一点:SRDCF将图像信号x尽量取大一些的尺寸,保留目标更多的真实信息,然后再通过一个空间权值系数w来惩罚距离目标中心比较远的样本。
对上述公式进行求解,作者用的Gauss-Seidel来迭代求解,我觉得这个迭代方法很一般,速度很慢,SRDCF计算速度在4fps左右,达不到实时跟踪的要求,不如ADMM(可参考知乎《交替方向乘子法(ADMM)算法的流程和原理是怎样的?》)。故就不做详细说明了。
四、公式推导(引自知乎用户)
接着如下:

由第一帧的groundtruth可以计算第一帧的情况:

随后进行迭代。
五、效果与待解决问题
正则项 www 用二次函数来构造:
w(m,n)=μ+η(m/P)2+η(n/Q) 2
1.P×QP\times QP×Q 表示目标尺寸
2.w的最小值 μ=0.1
3.正则化影响因子 η=3
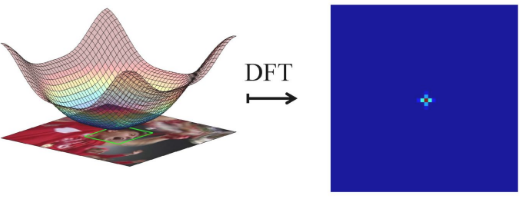
4.实际上频域下的 w只有几个值有较大的幅值,如下图所示。为保证 wˆ的稀疏特性,设置阈值来移除较小的值,结果包含约10个非零值。
5.HOG特征,cell大小为 4×44,特征大小为 M×N(M=N)
6.样本区域是目标区域的 4^2
7.初始尺度的样本M=50
8.学习率 γ=0.025,Gauss-Seidel迭代次数 NGS=4
9.在普通台式机matlab环境下5FPS
六、ADMM求解SRDCF
参见文章《相关滤波跟踪算法中ADMM的使用》,代码可下载。

最后,给出代码下载地址和搜罗的各路大神对算法解读的文章,供大家参考学习。
视觉目标跟踪算法——SRDCF算法解读的更多相关文章
- 挑战目标跟踪算法极限,SiamRPN系列算法解读
商汤科技智能视频团队首次开源其目标跟踪研究平台 PySOT.PySOT 包含了商汤科技 SiamRPN 系列算法,以及刚被 CVPR2019 收录为 Oral 的 SiamRPN++.此篇文章将解读目 ...
- 基于MeanShift的目标跟踪算法及实现
这次将介绍基于MeanShift的目标跟踪算法,首先谈谈简介,然后给出算法实现流程,最后实现了一个单目标跟踪的MeanShift算法[matlab/c两个版本] csdn贴公式比较烦,原谅我直接截图了 ...
- TLD目标跟踪算法
1. 简介 TLD目标跟踪算法是Tracking-Learning-Detection算法的简称.这个视频跟踪算法框架由英国萨里大学的一个捷克籍博士生Zdenek Kalal提出.TLD将传统的视频跟 ...
- Video Target Tracking Based on Online Learning—TLD单目标跟踪算法详解
视频目标跟踪问题分析 视频跟踪技术的主要目的是从复杂多变的的背景环境中准确提取相关的目标特征,准确地识别出跟踪目标,并且对目标的位置和姿态等信息精确地定位,为后续目标物体行为分析提供足 ...
- 【目标跟踪】相关滤波算法之MOSSE
简要 2010年David S. Bolme等人在CVPR上发表了<Visual Object Tracking using Adaptive Correlation Filters>一文 ...
- 目标跟踪算法meanshift优缺点
原博主:http://blog.csdn.net/carson2005/article/details/7341051 meanShift算法用于视频目标跟踪时,采用目标的颜色直方图作为搜索特征,通过 ...
- 目标跟踪之粒子滤波---Opencv实现粒子滤波算法
目标跟踪学习笔记_2(particle filter初探1) 目标跟踪学习笔记_3(particle filter初探2) 前面2篇博客已经提到当粒子数增加时会内存报错,后面又仔细查了下程序,是代码方 ...
- Python Opencv-contrib Camshift&kalman卡尔曼滤波&CSRT算法 目标跟踪实现
本次课题实现目标跟踪一共用到了三个算法,分别是Camshift.Kalman.CSRT,基于Python语言的Tkinter模块实现GUI与接口设计,项目一共包含三个文件: main.py: # co ...
- 【图像处理】Haar Adaboost 检测自定义目标(视频车辆检测算法代码)
阅读须知 本博客涉及到的资源: 正样本:http://download.csdn.net/detail/zhuangxiaobin/7326197 负样本:http://download.csdn.n ...
随机推荐
- JAVA WEB期末项目第二阶段成果
我们做的系统是一个基于Java web与MySQL的食堂订餐系统 班级: 计科二班 小组成员:李鉴宣.袁超 1.开发环境 开发编辑器使用:Visual Studio Code 数据库使用:MySQL8 ...
- Servlet+JSP 对外访问路径配置
servlet类似 servlet配置为: <servlet> <servlet-name>Demo01_OutWrite</servlet-name> ...
- <NOI2002>银河英雄传说の思路
emm并没有什么好说的.毕竟我这个蒟蒻都能yy出来 #include<cstring> #include<cstdio> #include<iostream> #i ...
- ubuntu采用apt-get安装pure-ftpd
apt-get install pure-ftpdcd /etc/pure-ftpd/auth #开启虚拟账户登陆;ln -s 60auth ../conf/PureDB 60auth #查看虚拟账户 ...
- PS4游戏将登陆PC:一曲属于主机的悲歌
曾经,红白机.PS游戏机等成为一代人难以磨灭的记忆.而随后的索尼PS3.微软Xbox 360.任天堂Wii U等,也称霸了次时代主机时代,成为家庭娱乐的中心.但面对着依托于PC和智能移动终端 ...
- windows下用Python把pdf文件转化为图片
依赖:PyMuPDF(pip install pymupdf) # -*- coding: utf-8 -*- """ 1.安装库 pip install pymupdf ...
- Spark ML机器学习库评估指标示例
本文主要对 Spark ML库下模型评估指标的讲解,以下代码均以Jupyter Notebook进行讲解,Spark版本为2.4.5.模型评估指标位于包org.apache.spark.ml.eval ...
- 微信小程序从开发至发布的流程
今天在公司将这几天开发的小程序,进行版本上线,在这里记录下. 首先,将微信开发工具里的代码上传到微信小程序平台里,如下所示 之后,在微信小程序平台进行审核提交,填写相应的信息即可,注意,审核提交分为紧 ...
- Golang 使用Protocol Buffer 案例
目录 1. 前言 2. Protobuf 简介 2.1 Protobuf 优点 2.2 Protobuf 缺点 2.3 Protobuf Golang 安装使用 3. Protobuf 通讯案例 3. ...
- I - A计划 HDU - 2102
A计划 Time Limit: 3000/1000 MS (Java/Others) Memory Limit: 32768/32768 K (Java/Others)Total Submiss ...