第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】

版权声明:该教程版权归北京智能佳科技有限公司所有,未经公司授权禁止引用、发布、转载等,否则将追究其法律责任。
使用前说明:本使用文档说明略微简明,请结合指导视频进行操作会更容易理解!!
第一章节 BJROBOT ROS 网络配置及移动控制
1.工控机的系统用户名为 robot,密码:bjrobot
远程登录方式:a.teamview, 输入工控机IP,密码即可登录;
b.ssh登录:ssh bjrobot@192.168.50.102 密码:bjrobot
2.RK3399 Nanopi、树莓派 4b 的系统用户名为 pi,密码也是 pi
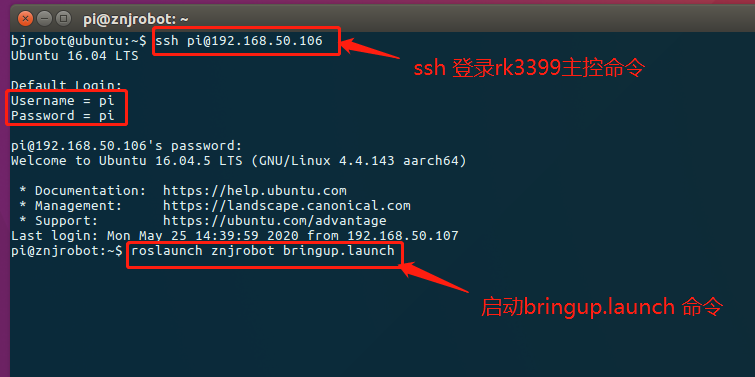
远程登录方式:a. ssh登录: ssh pi@192.168.50.100 密码:pi
b. vnc,输入用户名密码即可登录;
(需要先ssh登录到RK3399,启动/home/pi目录下的runVino.sh文件(启动命令为:./runVino.sh))
3.英伟达Nano 的系统用户名为 ubuntu, 密码:ubuntu
远程登录方式:a.vnc,输入Nano的IP,密码即可登录;
b.ssh登录: ssh ubuntu@192.168.50.106 密码:ubuntu
Teamview实现局域网内登录,需修改teamview选项中的网络设置选项中的呼入的LAN连接选项为<接受>,如下图所示:

用户名和密码是 ssh 连接的关键。
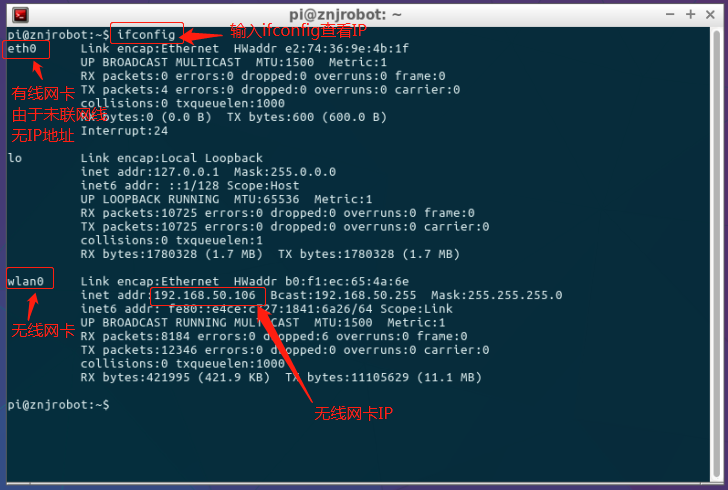
4.把小车组装好,电池充满电,小车主控接 HDMI 接口的显示器连接无线网络,进入系统,打开一个终端输入ifconfig,回车,记下小车无线网卡 ip。
5.下载资料配套虚拟机(我们提供的虚拟机已经安装好 ROS,已经编译好我们的源码与构建好相关环境),把虚拟机网络设配器设置成桥接模式。
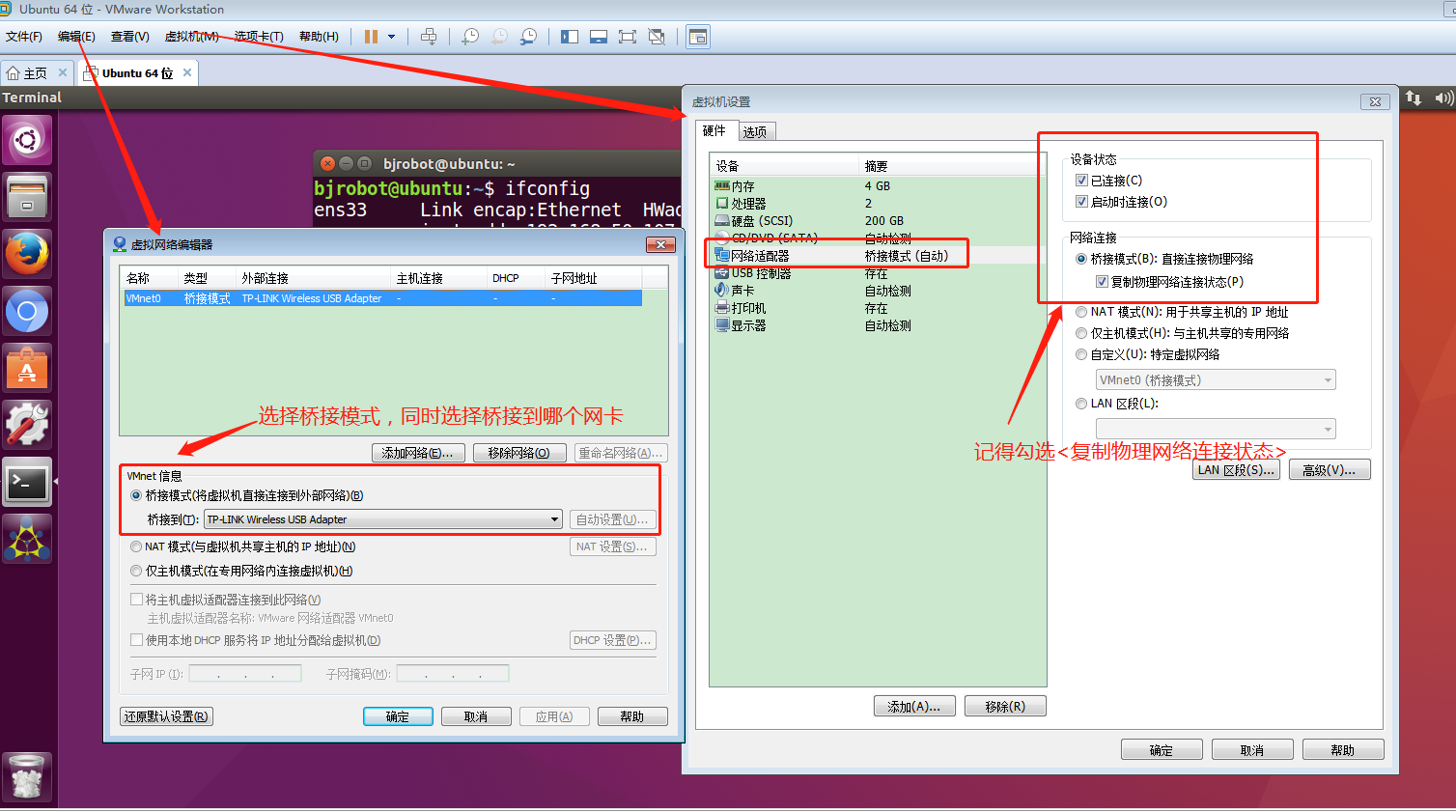
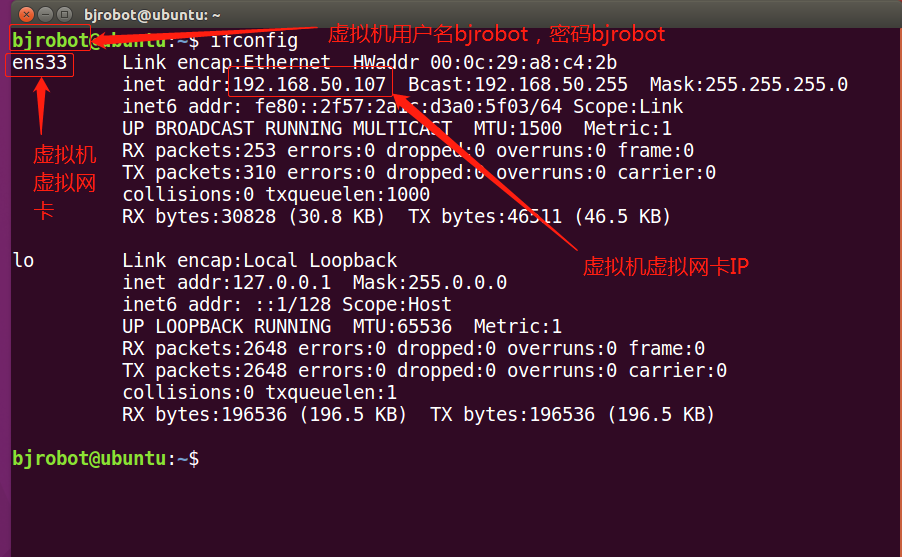
虚拟机确保桥接上PC 的网卡,并且能分配到 IP,跟小车主控连在同一个路由器的局域网内,同一网段!一定要同一网段!!(确保二者能相互ping通)
虚拟机端 vim ~/.bashrc,鼠标滚轮把光标移动到文件底端,按下图操作。
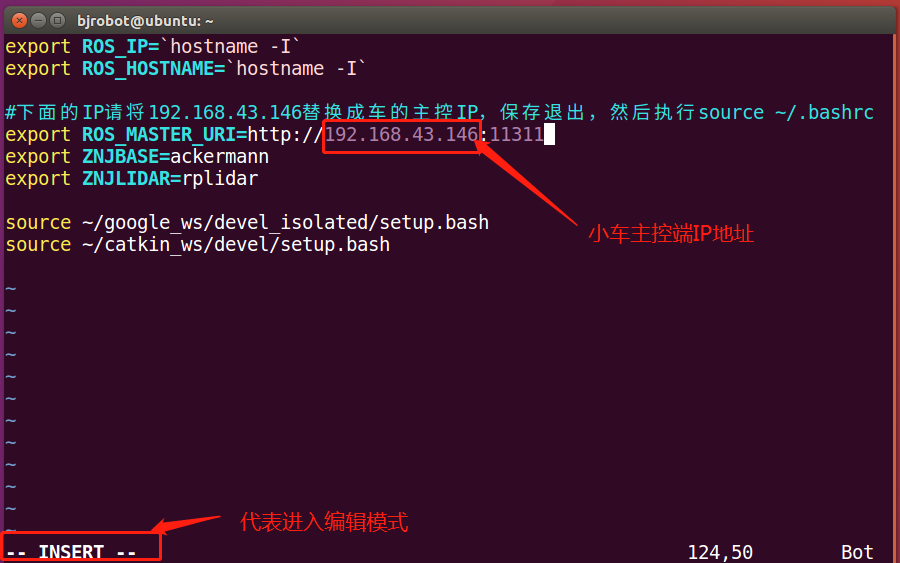
改好之后 退出编辑模式后,source ~/.bashrc 使之马上生效。
6.至此,虚拟机和主控端的控制相关配置以及设置好,接下来在虚拟机端打开一个终端ssh 过去小车主控端启动 roslaunch znjrobot bringup.launch 。
7.在虚拟机端再打开另外一个终端直接启动键盘控制。rosrunteleop_twist_keyboard teleop_twist_keyboard.py
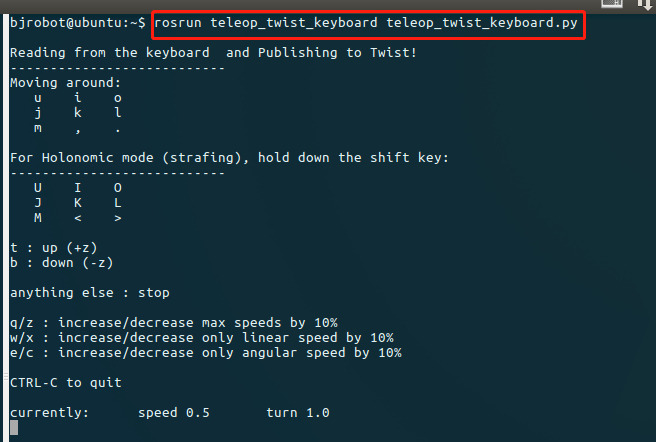
至此小车可以在虚拟机端通过键盘进行移动控制。
更多精彩视频演示和教程请点击:https://space.bilibili.com/521688736


第一章节 BJROBOT ROS 网络配置及移动控制【ROS全开源阿克曼转向智能网联无人驾驶车】的更多相关文章
- 第十五章节 BJROBOT cartographer 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第14章节 BJROBOT karto 算法构建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
建地图前说明:请确保你的小车已经校正好 IMU.角速度.线速度,虚拟机配置好 ROS 网络的前提进行,否则会造成构建地图无边界.虚拟机端无法正常收到小车主控端发布的话题数据等异常情况!! 1.把小车平 ...
- 第四章节 BJROBOT 线速度校正 【ROS全开源阿克曼转向智能网联无人驾驶车】
BJROBOT 线速度校正 1.把小车平放在地板上,用卷尺作为测量刻度,选取车头或者车尾处作为小车的起点, 打开资料里的虚拟机,打开一个终端 ssh 过去主控端启动 roslaunch znjro ...
- 第十九章节 BJROBOT 安卓手机 APP 导航【ROS全开源阿克曼转向智能网联无人驾驶车】
导航前说明:一定要确保你小车在构建好地图的基础上进行! 1.把小车平放在你想要构建地图区域的地板上,打开资料里的虚拟机,打开一个终端, ssh 过去主控端启动roslaunch znjrobot br ...
- 第十八章节 BJROBOT 安卓手机 APP 建地图【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobotbringup.launch 2.在虚拟机端再打开一个终端,ssh 过去主控端启动ro ...
- 第十七章节 BJROBOT opencv_apps 图像处理示例【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端启动roslaunch znjrobot camera.launch. 2.在虚拟机端启动 roslaunch opencv_ ...
- 第十六章节 BJROBOT 开机自启动服务【ROS全开源阿克曼转向智能网联无人驾驶车】
1.把小车平放在地板上,用资料里的虚拟机,打开一个终端 ssh 过去主控端运行rosrun robot_upstart install znjrobot/launch/bringup.launch 2 ...
- 第13章节 BJROBOT 雷达跟随【ROS全开源阿克曼转向智能网联无人驾驶车】
雷达跟随说明:注意深度摄像头的 USB 延长线,可能会对雷达扫描造成影响, 所以在雷达跟随前,把深度摄像头的 USB 延长线取下.另外雷达跟随范围大概是前方 50cm 和 120°内扫描到的物体都可以 ...
- 第十二章节 BJROBOT 摄像头寻线 【ROS全开源阿克曼转向智能网联无人驾驶车】
关于摄像头:普通摄像头, USB 免驱摄像头都可以使用. 1.如下图所示,用红色胶布在地板上贴一条线,小车摆放在线的一头处,让线在小车的中间位置,摄像头角度往下调整倾斜一点,好让摄像头识别到红线.注意 ...
随机推荐
- 关于Python中中文文本文件使用二进制方式读取后的解码UnicodeDecodeError问题
最近老猿在进行文件操作的验证测试,发现对于中文文本文件如果使用二进制方式打开,返回的类型是bytes,如果要转换成可读的字符串信息需要进行解码.可是老猿使用decode()或decode(" ...
- 第10.7节 Python包和子包的定义步骤
一. 包的定义步骤 按照包名创建或使用一个已有目录,目录名就是包名,必须注意包的目录必须位于Python加载模块的搜索路径中(具体请参考<第10.1节 Python的模块及模块导入>关于模 ...
- LoadRunner 多用户并发 登录,上传数据,登出的脚本教程
这里记录 Web/Http 模式,模拟多用户并发进行 : 登录,上传数据,退出登录一整套流程.并发的用户量多少,可自定义.这里不介绍录屏的方式,是自己写脚本去执行的. 1.安装loadRunner ...
- java后端开发学习路线
思维导图(欢迎克隆):https://www.processon.com/mindmap/5f563cd31e08531762c4e32b 主要包括:编程基础.研发工具.应用框架.运维知识(主要学会配 ...
- 在DLL中使用对话框
在 DLL 中使用对话框资源与在 EXE 中使用是有所区别的,处理不当便会造成断言失败.原因是因为 CDialog::Create 与 CreateEx 默认使用当前进程中的资源(Dialog Tem ...
- 10分钟快速入门vue.js
Vue.js是一个轻巧.高性能.可组件化的MVVM库,一套用于构建用户界面的渐进式框架,上手简单,兼容强大. 官方文档:https://cn.vuejs.org/v2/guide/ 下面我们就直接来使 ...
- STL—— 容器(vector)的数据插入之 insert()
vector 容器可以使用 vectorName.insert() 方法插入元素,vectorName.insert() 函数一共有4种重载方法: 第一种 insert() 用法:在指定地址插入单个元 ...
- Day5 - 04 函数的参数-可变参数*
传入的参数的个数是可变的. 例子:定义一个函数,通过给出一组数,返回这组数中最大值与最小值的和. def msum(numbers): r = max(numbers) + min ...
- 十、TestNG分组测试
使用 groups 属性 package com.lc.tesgFenZu; import org.testng.annotations.AfterGroups; import org.testng. ...
- Spring @Scheduled Annotation
1.Overview 这里我们将会学习Spring @Scheduled 标签,了解它是如何配置,如何设置定时任务. 关于它的使用,有两点简单的规则需要记住: ※它的方法应该是一个void返回值类型 ...