TurtleBot3使用课程-第一节b(北京智能佳)
目录
1.1 ROS安装和设置2
1.2真实机器人与仿真交叉开发 8
1.2.1目标 8
1.2.1.1网络配置 8
1.2.1.2网络设置方案1 8
1.2.1.3网络设置方案2 11
1.2.2 ROS网络设置 13
1.2.3其他设置 14
1.2.4 Turtlebot3,如何运行模拟转换 16

![]()
1.模拟运行TurtleBot
Turtlebot3支持一个可以通过仿真在虚拟环境中编程和开发机器人的环境。 有两种开发环境可供选择:使用假节点和RViz可视化工具或使用3D模拟器Gazebo。 使用假节点适合于测试机器人的模型和运动,但它具有无法使用传感器的缺点。 Gazebo推荐使用SLAM导航,因为它允许模拟各种传感器,如IMU、LIDAR和相机。
![]()
1.1ROS安装和设置
要使用turtlebot3_fake_node,需要安装turtlebot3_simulation元包。 要使用turtlebot3_simulation元包,必须安装turtlebot3元包和turtlebot3_msgs包。
[远程PC]使用以下命令安装包。

![]()
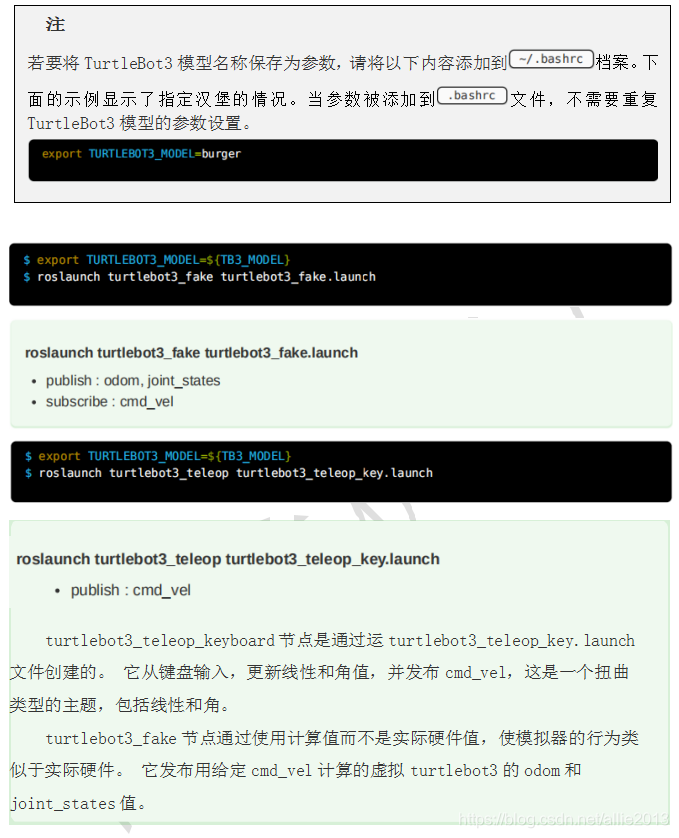
[远程PC]要运行虚拟机器人,请运行turtlebot3_fake的.launch文件,如下所示。
turtlebot3_fake是一个简单的节点,可以在不使用真正的机器人的情况下进行模拟。 在RViz中,您可以使用远程控制节点控制虚拟Turtle Bot3。
您必须首先指定turtlebot3的模型名称。 在下面的命令中指定模型的名称(汉堡、华夫、waffle_pi)到与${TB3_MODEL}对应的部分。
![]()
1.1.1 turtlebot3 在Gazebo中模拟
使用Gazebo有两种模拟方法,一种使用ROS中的turtlebot3_gazebo包,另一种使用没有ROS的turtlebot3_gazebo_plugin。在这里,我们将使用使用ROS和turtlebot3_gazebo的方法。
1.1.1.1用于Gazebo的ROS包装
当第一次在远程PC上运行Gazebo时,程序可能需要一段时间才能启动。
A.虚拟世界的例子
[远程PC]Turtle Bot3可以使用下面的命令加载到Gazebo上的一个空空间中。

![]()
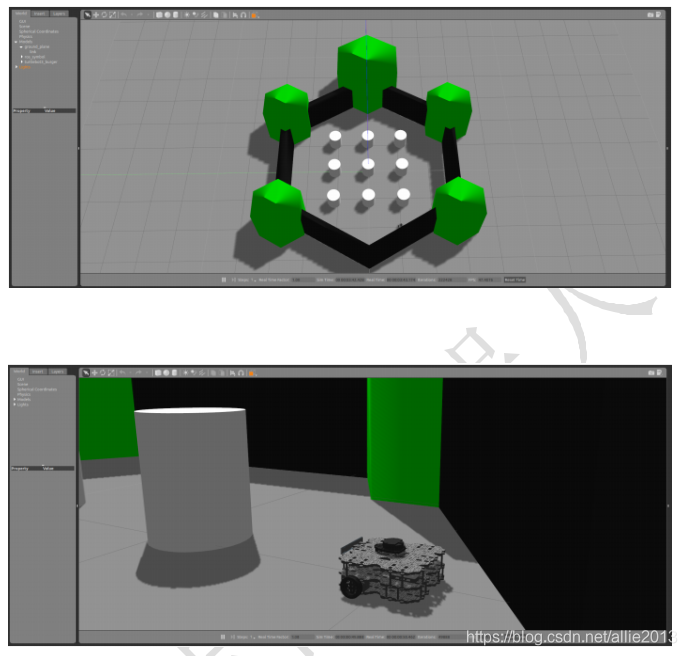
B.turtlebot3 世界例子
[远程PC]Turtle Bot3可以使用下面的命令加载到基于turtle Bot符号的地图中。

![]()
![]()
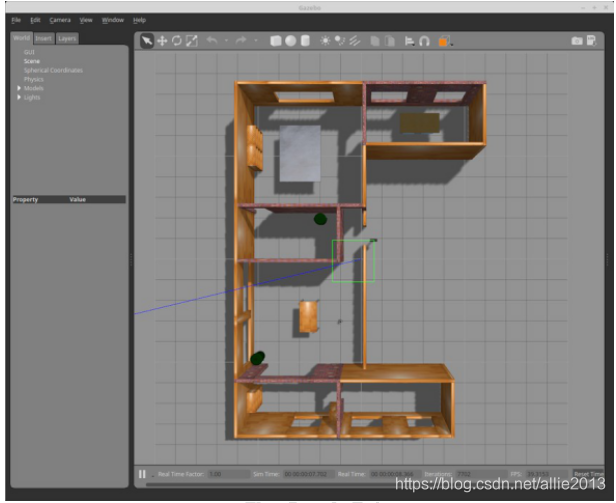
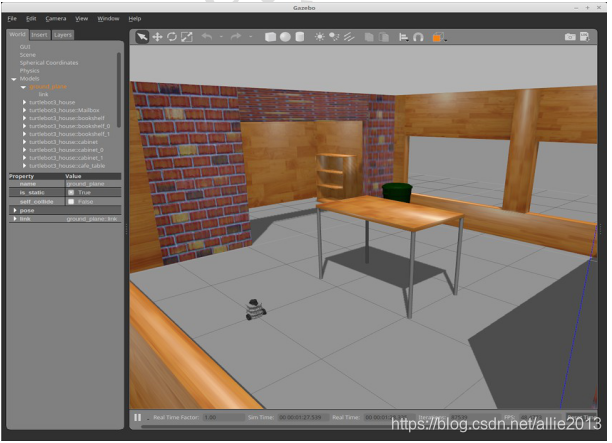
C.turtlebot3房子示例
[远程PC]Turtle Bot3可以使用下面的命令加载到虚拟建筑中。

![]()
1. 1. 1. 2. turtlebot3运行
[远程PC]打开一个新的终端窗口并使用下面的命令运行turtlebot3_teleop_key节点

![]()
1. 1. 1. 3. 避免碰撞
[远程PC]要自动移动turtlebot3世界中的turtlebot3,请关闭所有操作终端,并在新的终端窗口中输入以下命令。

![]()
[远程PC]打开一个新的终端窗口并运行下面的避免碰撞模拟节点。

![]()
1. 1. 1. 4. 运行 RViz
[远程 PC]RViz在模拟运行时可视化发布主题的数据。
您可以通过在新的终端窗口中输入以下命令来运行RViz。
![]()
1.2真实机器人与仿真交叉开发
1.2.1目标
提出了一个环境,使20个Turtlebot3点和40个模拟之间的无缝交叉开发,并提出了一个网络配置计划。
提出了交叉开发的实现方法。
1.2.1.1 网络配置
假设
所有TB3和用户PC(模拟)都有一个静态IP。
虽然用户PC即使不是静态IP也可以操作,但建议用户使用静态IP来方便ROS网络设置。
每个用户都知道用户应该使用的TB3的IP地址。
1.备选案文1
使用多个路由器(5个):4个TB3和8个人(包括模拟器)使用一个路由器(推荐)
2.备选案文2
连接到高性能路由器的40人和20TB3
1.2.1.2 网络设置(方案1)
1.路由器设置
SSID和路由器IP(IP带):每个路由器都有不同的设置方法,因此省略了详细的解释
![]()
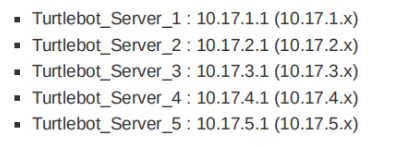
2.turtlebot3网络设置
IP地址示例(在Turtlebot_Server_1的情况)
[Turtlebot3]IP:4个单元
10.17.1.11
10.17.1.12
10.17.1.13
10.17.1.14
[用户个人电脑]IP:8
10.17.1.22
10.17.1.23
10.17.1.24
10.17.1.25
10.17.1.26
10.17.1.27
10.17.1.28
设置Turtlebot3的IP和用户PC连接到其余4台服务器,地址与上面的方法相同。
网络设置
[Turtlebot3](10.17.1.11)
1.将键盘、鼠标和监视器连接到Turtlebot,然后启动RaspberryPI。
2.打开终端窗口,更改
![]()
![]()
3.添加下面的内容

![]()
4.保存文件后重新启动

![]()
5.配置网络管理器如下图所示
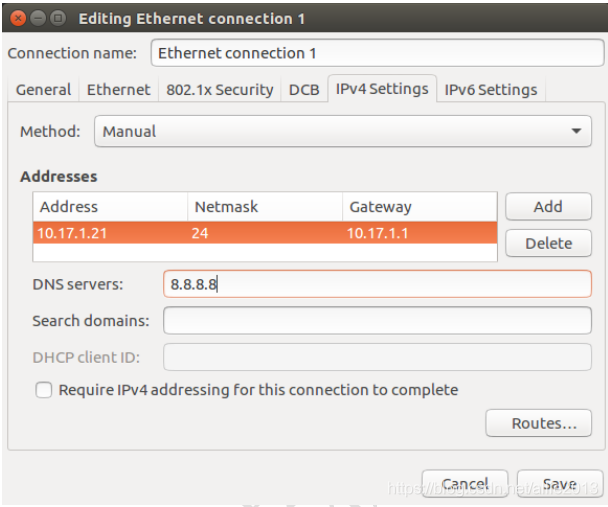
![]()
6.连接到路由器,检查IP地址
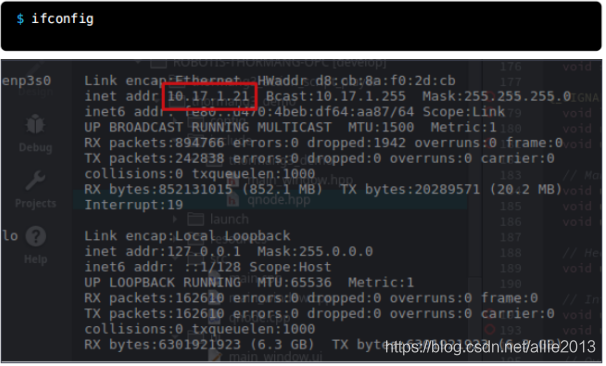
![]()
1.2.1.3网络设置(方案2)
1.路由器设置
SSID和路由器IP(IP带):每个路由器都有不同的设置方法,因此省略了详细的解释。
Turtlebot_Server:10.17.1.1(10.17.1.x)
- Turtlebot3机器人网络设置(使用静态IP方便)IP地址示例
IP地址示例
IP:20个单位
10.17.1.11~30-[用户个人电脑]IP:40台
10.17.1.1.101~140-网络设置-[Turtlebot3](10.17.1.11)
1.将键盘,鼠标和监视器连接到Turtlebot,然后启动RaspberryPI
2.打开终端窗口,更改 一部分 文件。

![]()
3.添加下面的内容

![]()
4.保存文件后重新启动

![]()
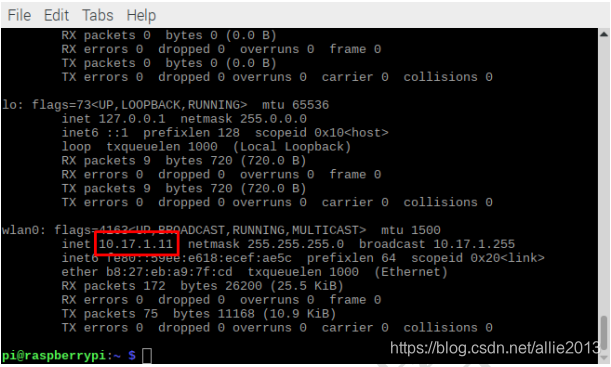
5.连接到路由器,检查IP地址。 打开一个终端,输入如下。

![]()
[用户个人电脑](10.17.1.101)
![]()
1.在网络管理器中设置后保存,如下图所示。
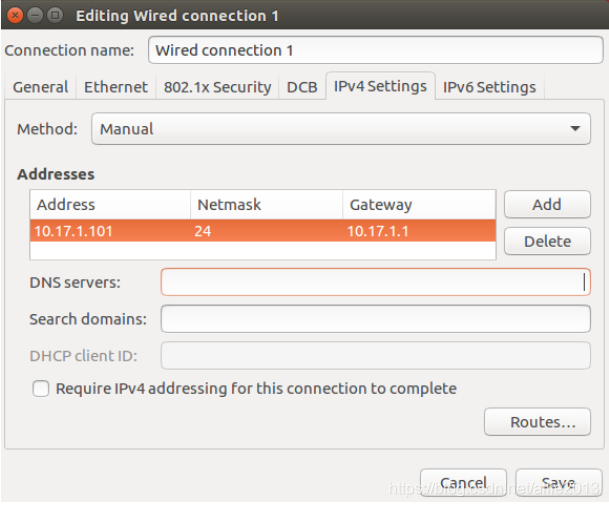
![]()
2.连接到路由器,检查IP地址
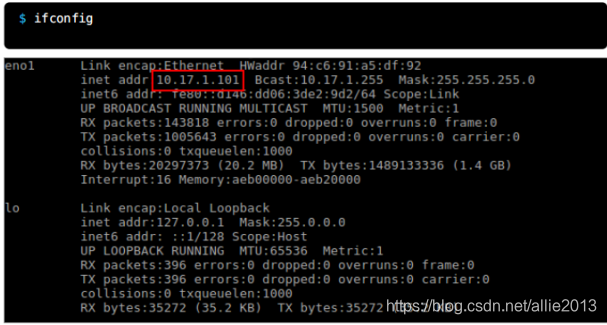
![]()
1.2.2 ROS网络设置
这里的ROS网络设置是一种不同于以前使用的方法的新方法。
通过应用此方法,无需执行

![]()
连接到后的命令TurtleBot SBC从远程PC在未来
完成设置后,您可以运行连接到网络的TurtleBot3
在远程PC上直接输入带有TurtleBot3的IP地址的命令。

![]()
1.[Turtlebot3]
不需要额外的ROS网络设置。
2.[用户个人电脑]
参考资料:e手册
用户PC IP示例:10.17.1.101
检查用户PC的IP(当输入下面的命令时,上面设置的用户PC的静态IP将被输出)

![]()
编辑 文件:修改下面的文本,如果缺少文本,则添加文本。

![]()
1.2.3其他设置
1.[Turtlebot3]
创造 使用机器标签(文件位置:)在启动文件中使用的文件:(
/home/pi)
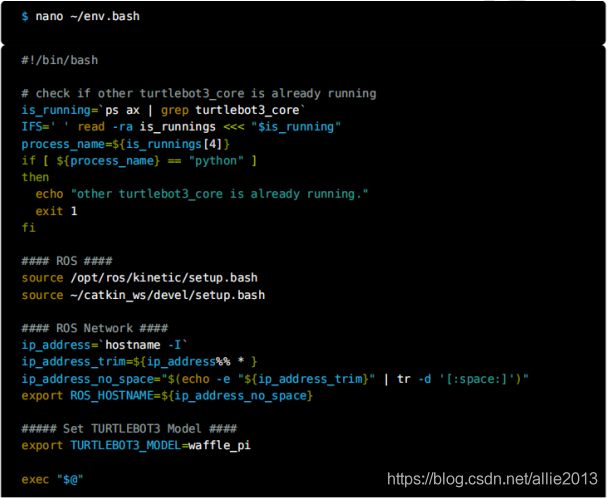
![]()
添加执行权限
![]()

![]()
2.[用户个人电脑]
生成要连接的Turtlebot3的ssh键,使用下面要创建的脚本
创建keygen脚本:使用ssh键扫描Create脚本的各种算法进行密钥生成
创建脚本
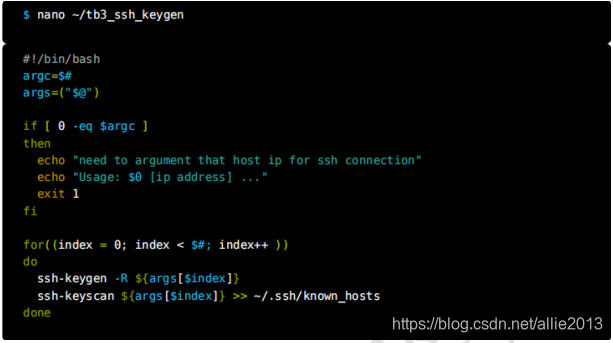
![]()
添加执行权限

![]()
运行脚本(ex。 如果TB3的IP为10.17.3.11~30,则在将静态IP设置为20TB3单元后,命令应在TB3打开后执行)

![]()
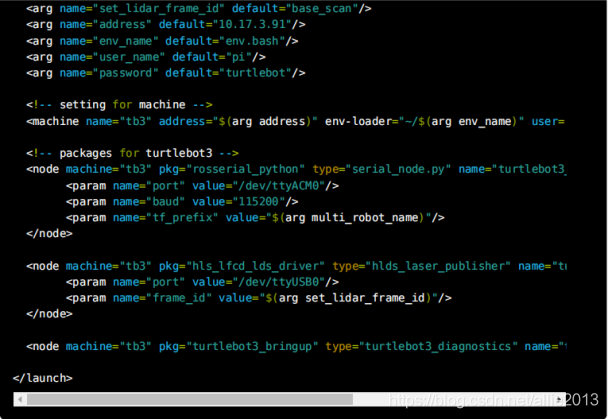
创造turtlebot3_robot_machine.发行
1.机器标记是针对节点的,因此它不能与包含标记一起工作。 turtlebot3_robot.launch文件需要修改。
2.[Turtlebot3]turtlebot3_robot.launch的候补。 不需要直接连接到3.Turtlebot,也不需要在运行时更改Turtlebot3的ROS网络设置。
在turtlebot3/turtlebot3_bringup/Launch文件夹中创建下面的文件

![]()
![]()
1.2.4 Turtlebot3,如何运行模拟转换
所有执行都在[远程PC]上执行]
1.运行TB3
roscore打开roscore终端并输入下面的命令

![]()
Turtlebot遥控器:turtlebot3_robot_machine.launch
打开另一个终端并输入下面的命令(假设连接turtlebot3的IP地址为10.17.1.11)

![]()
![]()
1.当出现SSH错误时,输入以下命令并再次运行

![]()
2.如果另一个用户正在使用Turtlebot,则在启动启动文件时会出现以下消息

![]()
打开另一个终端,输入下面的命令

![]()
Rviz
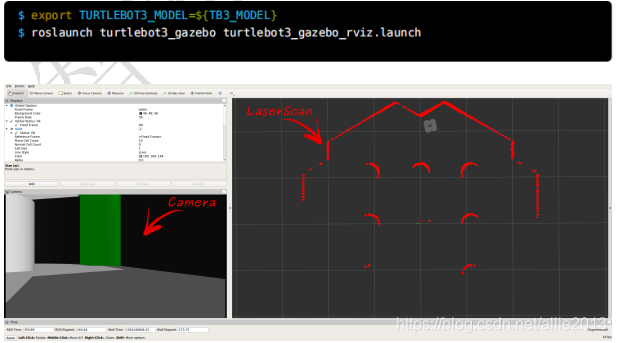
打开一个新终端,输入以下命令(如果使用WafflePI,输入waffle_pi而不是${TB3_MODEL}

![]()
2.运行模拟(Gazebo)参考:roscoree手册
打开一个终端,输入下面的命令

![]()
运行Gazebo打开另一个终端,并输入下面的命令(如果使用WafflePI,则输入waffle_pi而不是${TB3_MODEL})

![]()
Rviz
打开一个新终端,输入以下命令(如果使用WafflePI,输入waffle_pi而不是${TB3_MODEL})

![]()
![]()
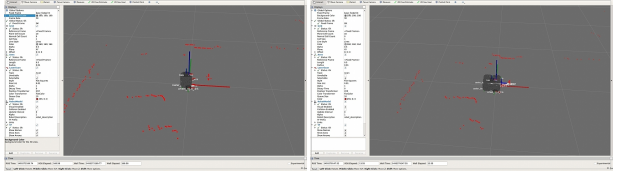
3.使用切换
实时切换:凉亭在使用/use_sim_time参数的实时切换(切换使用同时保持roscore)方面存在困难。
切换方法
关闭所有节点,包括roscore(按下 
![]()
采用上述方法切换Turtlebot3真实机器人和仿真比较。

![]()
TurtleBot3使用课程-第一节b(北京智能佳)的更多相关文章
- TurtleBot3使用课程-第一节a(北京智能佳)
目录 1.ROS设置(远程PC) 2 1.1 ROS安装和设置 2 1.1.1 设置source.list 2 1.1.2 键设置 2 1.1.3 ROS安装 2 1.1.4安装包构建的依赖关系 2 ...
- TurtleBot3使用课程-第二节b(北京智能佳)
目录 1.导航 2 1.1 运行导航节点 3 1.1.1 [远程PC]运行roscore 3 1.1.2 [turtlebot3 SBC]运行提出turtlebot3 3 1.1.3[远程PC]运行导 ...
- TurtleBot3使用课程-第二节a(北京智能佳)
目录 1.[第3类]LRF(LDS)传感器 2 1.1 传感器包安装 2 1.1.1 传感器端口访问设置 2 1.1.2 运行hlds_laser_publisher节点 2 1.1.3 在RViz中 ...
- android课程第一节(TextView控件使用)
TextView控件使用 一.TextView基本使用(创建方式) 1.在程序中创建TextView对象 如下代码: @Override protected void onCreate(Bundle ...
- 第二部分 实习操作课程 第一节 ArcGIS Online的基本功能
- 火云开发课堂 - 《使用Cocos2d-x 开发3D游戏》系列 第一节:3D时代来临!
<使用Cocos2d-x 开发3D游戏>系列在线课程 第一节:3D时代来临.Cocos2d-x程序猿的机遇和挑战! 视频地址:http://edu.csdn.net/course/deta ...
- 第一节 课程简介与HTML5概述
第一节 课程简介与HTML5概述 *********************************************************** 1.1课程简介 教学目的: 从基础入手到能够运 ...
- 我的第一节Android课
我的第一节安卓课程,今天非比寻常的一天,我开始了我程序猿之路的第一节安卓课程,安卓课程只是我的一个兴趣班,我的本专业是java开发,因为喜欢做一个属于自己的一个手机APP,就选多个一样技能,毕竟十八般 ...
- 大道至简第一章和java理论学时第一节。感受。
这周上了本学期的第一节java课程.课件上说了一些学习java的基本思想.举了个“愚公移山”的例子.这可能就像刚接触一门新的语言,来练习输出“HelloWorld”一样,已成惯例. “愚公移山”的这个 ...
随机推荐
- 第4.2节 神秘而强大的Python生成器精讲
一. 生成器(generator)概念 生成器是一个特殊的迭代器,它保存的是算法,每次调用next()或send()就计算出下一个元素的值,直到计算出最后一个元素,没有更多的元素时,抛出StopIte ...
- Python中import模块时报SyntaxError: (unicode error)utf-8 codec can not decode 错误的解决办法
老猿有个通过UE编辑(其他文本编辑器一样有类似问题)的bmi.py文件,在Python Idle环境打开文件执行时没有问题,但import时报错: SyntaxError: (unicode erro ...
- Python正则表达式re模块学习遇到的问题
Python正则表达式处理的组是什么? Python正则表达式处理中的匹配对象是什么? Python匹配对象的groups.groupdict和group之间的关系 Python正则表达式re.mat ...
- PyQt(Python+Qt)学习随笔:QTreeView树形视图的sortingEnabled属性
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 QTreeView树形视图的sortingEnabled属性用于控制视图中的数据是否启用按表头排序, ...
- Python学习随笔:使用xlwings读取和操作Execl文件
一.背景 有2种模块可以对Execl文件,一种是xlwt 方式,需要安装三个库文件 xlrd(读Excel)xlwt(写Excel)xlutils(修改Excel),也是网上介绍文章最多的一种方法,一 ...
- CNVD漏洞证书(2)
第二张CNVD的原创漏洞证书. 关于证书申请可以看我之前写的这篇博客: https://www.cnblogs.com/Cl0ud/p/12720413.html 继续加油
- linux 解压缩文件(tar和zip)
tar -zcvf /home/xahot.tar.gz /xahottar -zcvf 打包后生成的文件名全路径 要打包的目录 sudo apt install zip unzip zip -r a ...
- Scrum冲刺_Day04
一.团队展示: 1.项目:light_note备忘录 2.队名:删库跑路队 3.团队成员 队员(不分先后) 项目角色 黄敦鸿 后端工程师.测试 黄华 后端工程师.测试 黄骏鹏 后端工程师.测试 黄源钦 ...
- 微信小程序日期转换、比较、加减
直接上干货: 在utils目录下新建一个dateUtil.js,代码如下:(在需要用的地方引入这个js,调用相关方法传入对应参数就可以使用了) 该工具脚本,实用性很高,通用于各类前端项目,熟悉后亦可以 ...
- SpringBoot快速入门(实战篇一)
SpringBoot快速入门(一) 一SpringBoot简介 1.spring开发经历的阶段 Spring 诞生时是 Java 企业版(Java Enterprise Edition,JEE,也称 ...