安装arbotix simulator仿真环境--9
原创博客:转载请表明出处:http://www.cnblogs.com/zxouxuewei/ 周学伟
安装之前:首先确保已经正常制作了ros工作空间并且安装了rbx1功能包:
cd ~/catkin_ws/src
git clone https://github.com/pirobot/rbx1.git
cd rbx1
git checkout indigo-devel
cd ~/catkin_ws
catkin_make
source ~/catkin_ws/devel/setup.bash
rospack profile
1.安装simulator
sudo apt-get install ros-indigo-arbotix-*
注意:一定要删除任何早期版本的arbotix依赖。
rospack profile
2. 为了确保一切工作,确保roscore运行,然后启动模拟turtlebot如下
roslaunch rbx1_bringup fake_turtlebot.launch
输出信息如下:
.. logging to /root/.ros/log/c0433730-e414-11e5-8d90-c48e8f5baa47/roslaunch-zxwubuntu-Aspire-V3-572G-.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB. started roslaunch server http://zxwubuntu-Aspire-V3-572G:56323/ SUMMARY
======== CLEAR PARAMETERS
* /arbotix/ PARAMETERS
* /arbotix/baud:
* /arbotix/controllers/base_controller/Kd:
* /arbotix/controllers/base_controller/Ki:
* /arbotix/controllers/base_controller/Ko:
* /arbotix/controllers/base_controller/Kp:
* /arbotix/controllers/base_controller/accel_limit: 1.0
* /arbotix/controllers/base_controller/base_frame_id: base_footprint
* /arbotix/controllers/base_controller/base_width: 0.26
* /arbotix/controllers/base_controller/ticks_meter:
* /arbotix/controllers/base_controller/type: diff_controller
* /arbotix/port: /dev/ttyUSB0
* /arbotix/rate:
* /arbotix/read_rate:
* /arbotix/sim: True
* /arbotix/sync_read: True
* /arbotix/sync_write: True
* /arbotix/write_rate:
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 20.0
* /rosdistro: indigo
* /rosversion: 1.11.
* /use_sim_time: False NODES
/
arbotix (arbotix_python/arbotix_driver)
robot_state_publisher (robot_state_publisher/state_publisher) ROS_MASTER_URI=http://localhost:11311 core service [/rosout] found
process[arbotix-]: started with pid []
process[robot_state_publisher-]: started with pid []
3.使用一个模型的pi-机器人,运行命令:
roslaunch rbx1_bringup fake_pi_robot.launch
输出信息如下:
PARAMETERS
* /arbotix/baud:
* /arbotix/controllers/base_controller/Kd:
* /arbotix/controllers/base_controller/Ki:
* /arbotix/controllers/base_controller/Ko:
* /arbotix/controllers/base_controller/Kp:
* /arbotix/controllers/base_controller/accel_limit: 1.0
* /arbotix/controllers/base_controller/base_frame_id: base_link
* /arbotix/controllers/base_controller/base_width: 0.26
* /arbotix/controllers/base_controller/ticks_meter:
* /arbotix/controllers/base_controller/type: diff_controller
* /arbotix/joints/arm_elbow_flex_joint/id:
* /arbotix/joints/arm_elbow_flex_joint/invert: True
* /arbotix/joints/arm_elbow_flex_joint/max_speed:
* /arbotix/joints/arm_elbow_flex_joint/neutral:
* /arbotix/joints/arm_shoulder_lift_joint/id:
* /arbotix/joints/arm_shoulder_lift_joint/invert: True
* /arbotix/joints/arm_shoulder_lift_joint/max_speed:
* /arbotix/joints/arm_shoulder_lift_joint/neutral:
* /arbotix/joints/arm_shoulder_pan_joint/id:
* /arbotix/joints/arm_shoulder_pan_joint/invert: False
* /arbotix/joints/arm_shoulder_pan_joint/max_angle:
* /arbotix/joints/arm_shoulder_pan_joint/max_speed:
* /arbotix/joints/arm_shoulder_pan_joint/min_angle: -
* /arbotix/joints/arm_shoulder_pan_joint/neutral:
* /arbotix/joints/arm_wrist_flex_joint/id:
* /arbotix/joints/arm_wrist_flex_joint/invert: True
* /arbotix/joints/arm_wrist_flex_joint/max_angle:
* /arbotix/joints/arm_wrist_flex_joint/max_speed:
* /arbotix/joints/arm_wrist_flex_joint/min_angle: -
* /arbotix/joints/arm_wrist_flex_joint/neutral:
* /arbotix/joints/gripper_joint/id:
* /arbotix/joints/gripper_joint/invert: False
* /arbotix/joints/gripper_joint/max_angle:
* /arbotix/joints/gripper_joint/max_speed:
* /arbotix/joints/gripper_joint/min_angle: -
* /arbotix/joints/gripper_joint/neutral:
* /arbotix/joints/head_pan_joint/id:
* /arbotix/joints/head_pan_joint/invert: False
* /arbotix/joints/head_pan_joint/max_angle:
* /arbotix/joints/head_pan_joint/max_speed:
* /arbotix/joints/head_pan_joint/min_angle: -
* /arbotix/joints/head_pan_joint/neutral:
* /arbotix/joints/head_tilt_joint/id:
* /arbotix/joints/head_tilt_joint/invert: False
* /arbotix/joints/head_tilt_joint/max_angle:
* /arbotix/joints/head_tilt_joint/max_speed:
* /arbotix/joints/head_tilt_joint/min_angle: -
* /arbotix/joints/head_tilt_joint/neutral:
* /arbotix/port: /dev/ttyUSB0
* /arbotix/rate:
* /arbotix/read_rate:
* /arbotix/sim: True
* /arbotix/sync_read: True
* /arbotix/sync_write: True
* /arbotix/write_rate:
* /robot_description: <?xml version="1....
* /robot_state_publisher/publish_frequency: 20.0
* /rosdistro: indigo
* /rosversion: 1.11.
* /use_sim_time: False
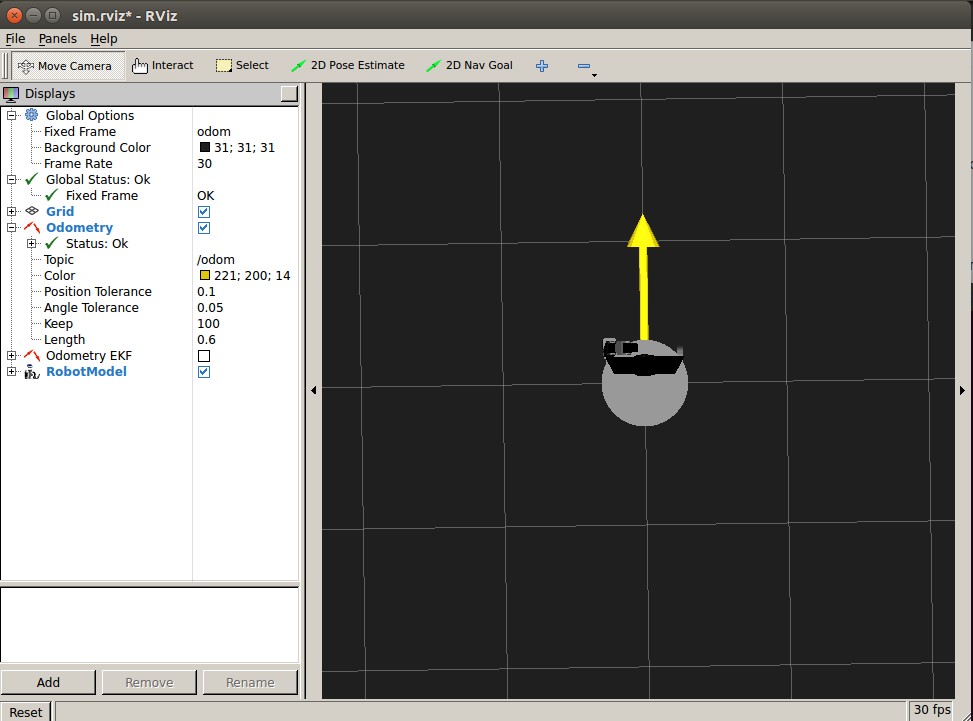
4.接下来,把rviz所以我们可以观察模拟机器人在行动:
rosrun rviz rviz -d `rospack find rbx1_nav`/sim.rviz
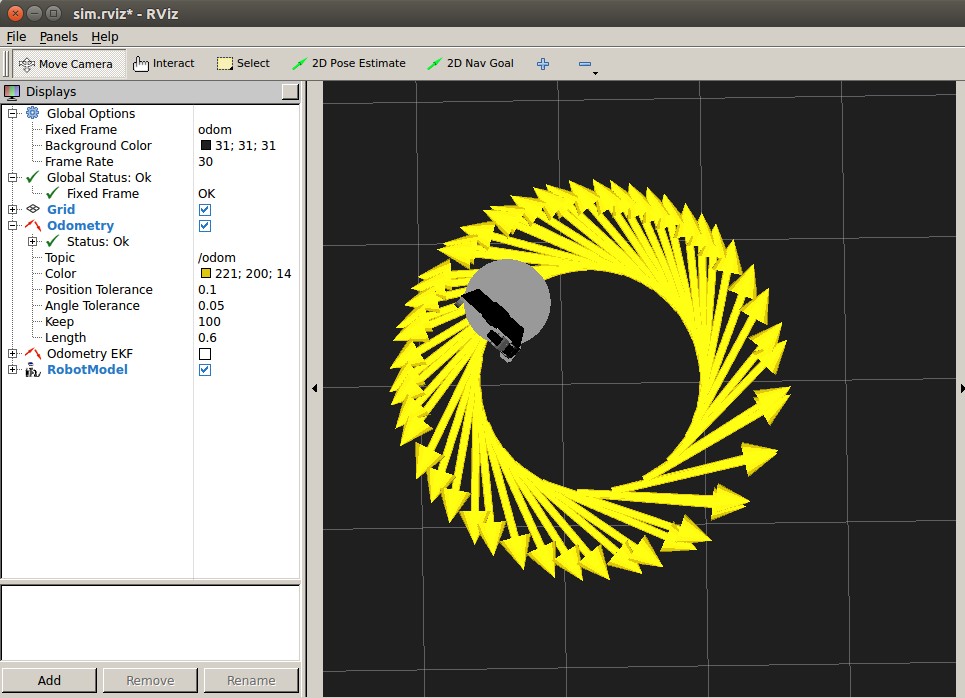
5.发布消息,使机器人移动。要测试模拟,打开另一个终端窗口,并运行以下要使模拟机器人在逆时针方向移动:
rostopic pub -r /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: , z: }, angular: {x: , y: , z: 0.5}}'
6.需要停止机器人 ,在同一个终端窗口式Ctrl-C,或者发布空Twist message:
rostopic pub - /cmd_vel geometry_msgs/Twist '{}'
安装arbotix simulator仿真环境--9的更多相关文章
- 给ros安装arbotix simulator仿真环境
首先下载程序包.编译.安装. cd ~/catkin_ws/src git clone https://github.com/pirobot/rbx1.git cd rbx1 git checkout ...
- 安装arbotix simulator仿真环境()
先安装rbx1功能包: cd ~/catkin_ws/src git clone https://github.com/pirobot/rbx1.git cd rbx1 git checkout in ...
- 基于 Mathematica 的机器人仿真环境(机械臂篇)[转]
完美的教程,没有之一,收藏学习. 目的 本文手把手教你在 Mathematica 软件中搭建机器人的仿真环境,具体包括以下内容(所使用的版本是 Mathematica 11.1,更早的版本可能缺少某些 ...
- 基于S7-PLCSIM Advanced搭建S7通信仿真环境
写在前面: 之前有专门讲过一期如何搭建西门子PLC的S7通信仿真环境,感兴趣的可以点击查看:戳↓ 1.基于TIA搭建西门子PLC仿真环境及通信方案-联合出品 2.手把手教你搭建西门子PLC仿真环境 那 ...
- 【新阁教育】穷学上位机系列——搭建STEP7仿真环境
经常有学员问我,学习上位机要不要买PLC硬件? 我一般的回答是:富则自行购买,穷则搭建仿真. PLC硬件,对于学习上位机来说,是锦上添花的事,经济条件允许,有则更好,条件不允许,我们也可以通过搭建仿真 ...
- 【探索之路】机器人篇(5)-Gazebo物理仿真环境搭建_让机器人运动起来
如果完成了前两步,那么其实我们已经可以去连接我们的现实中的机器人了. 但是,做机器人所需要的材料还没有到,所以我们这里先在电脑平台上仿真一下.这里我们用到的就算gazebo物理仿真环境,他能很好的和R ...
- 【转】linux和windows下安装python集成开发环境及其python包
本系列分为两篇: 1.[转]windows和linux中搭建python集成开发环境IDE 2.[转]linux和windows下安装python集成开发环境及其python包 3.windows和l ...
- 关于JDK 安装,以及Java环境的设置
关于JDK 安装,以及Java环境的设置 1.下载JDK1.6,选择对应的安装路径 2.配置相应的Java 环境变量 A.属性名称:JAVA_HOME 属性值:C:\Program Files\Jav ...
- Greenplum 数据库安装部署(生产环境)
Greenplum 数据库安装部署(生产环境) 硬件配置: 16 台 IBM X3650, 节点配置:CPU 2 * 8core,内存 128GB,硬盘 16 * 900GB,万兆网卡. 万兆交换机. ...
随机推荐
- C++-前缀和后缀
1,c++规定后缀形式的++操作符有一个int行的参数,被调用时,编译器自动加一个0作为参数给他 2,前缀返回一个reference,后缀返回一个const对象 /////////////////// ...
- HighAvailability和LoadBalancer
HighAvailability LoadBalancer 红帽RHCS lvs(三种工作 ...
- python遍历文件夹下的文件
在读文件的时候往往需要遍历文件夹,python的os.path包含了很多文件.文件夹操作的方法.下面列出: os.path.abspath(path) #返回绝对路径 os.path.basename ...
- RPI学习--环境搭建_串口连接
有两种, 一种是通过MAX2323芯片连接的串口,要接VCC为芯片供电. 另一种是通过PL2302芯片连接的USB,可不接VCC,用电脑USB口为芯片供电. 下面以通过MAX2323方式为例. 1,V ...
- jQuery dialog 简介
dialog是jQuery UI 库的一个UI组件,所以使用dialog时,不仅要引入jQuery.js(因为它只是轻量级的基础框架),还需要引入jQueryUI的js及相关css文件 示例: < ...
- SharePoint 2013 开发——概述
博客地址:http://blog.csdn.net/FoxDave 近来阅读SharePoint 2013开发一书,带着与大家一起分享其中的内容. 部署场景: 本地部署(On-Premise D ...
- UIlabel设置不同的颜色
NSString *string = @"注册过程中出现问题,致电400-650-5167联系会养车工作人员"; NSRange range = [string rangeO ...
- (转)Ratchet教程:Buttons组件
原文:http://www.w3cplus.com/mobile/create-buttons-with-ratchet.html Ratchet教程:Buttons组件 ...
- javascript splice
//arrayObject.splice(index,howmany,element1,.....,elementX)//index 必需.规定从何处添加/删除元素.(0)//howmany 必需.规 ...
- GNURadio For Windows编译安装脚本v1.1.1发布
GNURadio也能在Windows上运行了,安装GNURadio时,会自动化下载一系列powershell脚本,在源里进行build.然后它依赖为64位原生二进制文件,使用Visual Studio ...