【转载】 GPU地址空间的相关概念
为了结合上篇 文章 https://www.cnblogs.com/devilmaycry812839668/p/13264080.html
对RTX显卡是否能够实现P2P通信功能,同时专业级别显卡的共享内存功能是需要应用程序依托NVLINK高速访存的特性进行硬编码实现的很不是nvidia显卡或驱动原生具有的特性(这是个未验证的猜想),等,进行进一步的研究,转载下文:
https://blog.csdn.net/ZIV555/article/details/52556639
------------------------------------------------------------------------
知识点回顾:虚拟地址
一个进程要对内存的某存储单元进行读写操作时,需要该内存单元的内存位置,这个时候,通过物理寻址计算出该内存位置。然而不同的进程可能修改相同位置的内存导致程序间的相互影响,因此,计算机系统引入了虚拟地址。
- 每个进程都有自己的虚拟地址空间,相互之间无法读取其他进程的内存。
- 在大多数的系统中,虚拟地址空间分为许多页(>=4KB)。
- 虚拟地址与物理地址的映射表称为页表。这个转换过程称之为 程序的再定位。
- 32位操作系统,每个进程都有4GB大小空间的内存地址,因此一般来说,物理内存是不够用的。这个时候就引入了虚拟内存(如在磁盘中开辟空间)。
CUDA的地址空间
CUDA也使用了虚拟地址空间,为的是多个CUDA程序不会相互破坏GPU内存数据。然而,GPU没有给对内存的扩展,因此,虚拟地址通过页表转化后的物理地址必须对应物理内存。
在CUDA 1.0中,CPU与GPU各自独立拥有各自的虚拟地址空间和独立内存,必须显示的将数据拷贝才能使用对方内存中的数据。在这里,GPU可以在CPU内存中分配分页锁定内存(page-locked memory),该内存是分配在CPU物理内存中的,是DMA映射的。当数据从分页锁定内存拷贝到GPU内存中时,CUDA驱动程序会自动加速该内存拷贝的操作。
另外一点,异步拷贝操作要求CPU段的内存必须是分页锁定的,需要分页锁定内存起址信息,以确保内存复制完成之前,操作系统不会取消映射或者移动物理内存。
映射分页锁定内存 mapped memory
CUDA 2.2 提供了可映射分页锁定内存的特性。CPU端的分页锁定内存可以映射到GPU地址空间中,也就是说GPU端的页表包含了GPU虚拟地址与CPU物理地址的映射。这意味着在GPU端可以直接读取CPU端内存中的数据。这种方式我们称之为zero-copy。
需要注意几点:
- CPU端和GPU端的虚拟地址空间仍然是独立的。只不过在GPU端,页表中存在了关于CPU端分页锁定内存的映射关系。
- 由于存在不同的虚拟地址空间,因此这段映射的分页锁定内存存在两种形式:一种是,在CPU的指针,由cudaMallocHost返回;另外一种,是在GPU端的指针,需要通过 cudaHostGetDevicePointer()获得(记得之前需要调用cudaSetDeviceFlags()函数来设置cudaDeviceMapHost标志)。
- 在多卡的情况下,每个GPU都会有一个上下文。则如果我们将分页锁定内存设置为“可分享的”,即cudaHostAllocPortabled标志,那么这个映射将会存在所有GPU的CUDA上下文中。
- 随着统一虚拟地址(UVA)概念的出现,这种方式将不再推荐了。具体的见下一小节的讲解。
统一虚拟寻址 unified virtual addressing
在此之前我们讲到的两种情况,CPU端和GPU端都是独立的虚拟地址空间。在CUDA 4.0中,引入了统一虚拟寻址UVA的特性。顾名思义,在支持UVA的情况下(支持的系统会自动启动UVA),CPU内存和GPU内存的虚拟地址空间是一个整体了,不再是分开的。
几点编程上的便利:
- 对于CPU端的分页非锁定内存和GPU端的内存,CUDA可以推断出来该内存指针位于那个设备上面。因此,cudaMemcpy()函数最后的形参(拷贝方向)不需要指定具体的拷贝方向了,填写一个cudaMemcpyDefault即可,剩下的就交给CUDA来辨别拷贝方向了。
- 对于CPU端分页锁定内存,在UVA模式下,默认被映射和可分享的。而且CPU端和GPU端读写该内存的指针是相同的,只需要一个指针即可。一点例外:使用cudaHostRegister转化的CPU端分页锁定内存指针,设备端的指针还需要cudaHostGetDevicePointer()函数获得。
点对点寻址 peer-to-peer
在多卡环境下编程时,我们会碰到GPU与GPU之间的数据拷贝,使用的函数为(非点对点映射,只能称之为点对点内存拷贝):
__host__ cudaError_t cudaMemcpyPeer ( void* dst, int dstDevice, const void* src, int srcDevice, size_t count ) __host__ cudaError_t cudaMemcpyPeerAsync ( void* dst, int dstDevice, const void* src, int srcDevice, size_t count, cudaStream_t stream = 0 )
在这里的两个函数,指定了源设备和目的设备的ID,指定了拷贝的两个指针,指定了拷贝的大小。
当系统支持UVA时,我们就不必指定两个设备了,CUDA可以通过指针推断出来源于那个设备。因此,只需简化使用cudaMemcpy()函数就可以了。
__host__ cudaError_t cudaMemcpy ( void* dst, const void* src, size_t count, cudaMemcpyKind kind )
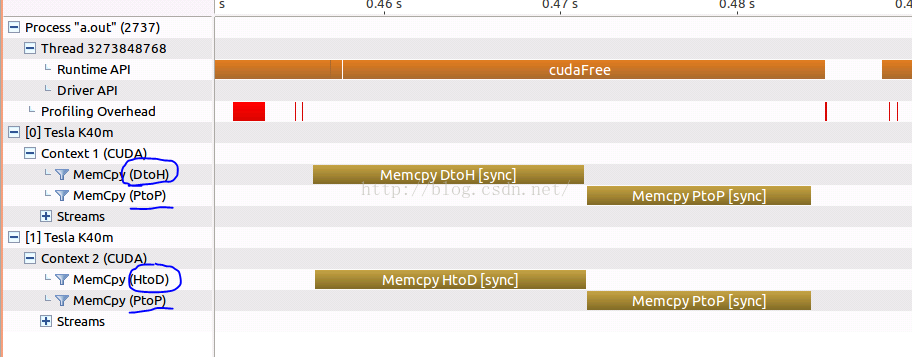
之前的这两种GPU之间数据拷贝其实是以CPU内存为媒介进行拷贝的。当我们使用nvvp软件查看GPU之间数据传输的timeline时,我们就发现整个拷贝包含两个步骤:
- SrcDevice to CPU (D2H)
- CPU to dstDevice (H2D)
这个是很耗时的。其实有一种更快的点对点寻址方式,peer-to-peer拷贝。这个特性不是默认打开的,通常我们需要这两步骤:
第一步,判断设备A是否可以通过P2P方式访问设备B:
__host__ cudaError_t cudaDeviceCanAccessPeer ( int* canAccessPeer, int device, int peerDevice )
第二步,如果可以,那么将P2P方式打开:
__host__ cudaError_t cudaDeviceEnablePeerAccess ( int peerDevice, unsigned int flags )
注意,这两步只是满足了设备A对设备B内存P2P访问,而设备B却无法对设备A P2P访问,因为这个是非对称的,仍需要使设备B对设备A做同样的操作。
当我们使用nvvp软件查看GPU之间数据传输的timeline时,我们就会发现,这是GPU之间的拷贝只包含了一个P2P的过程了。
在最后的测试用例中有相关的测试代码。
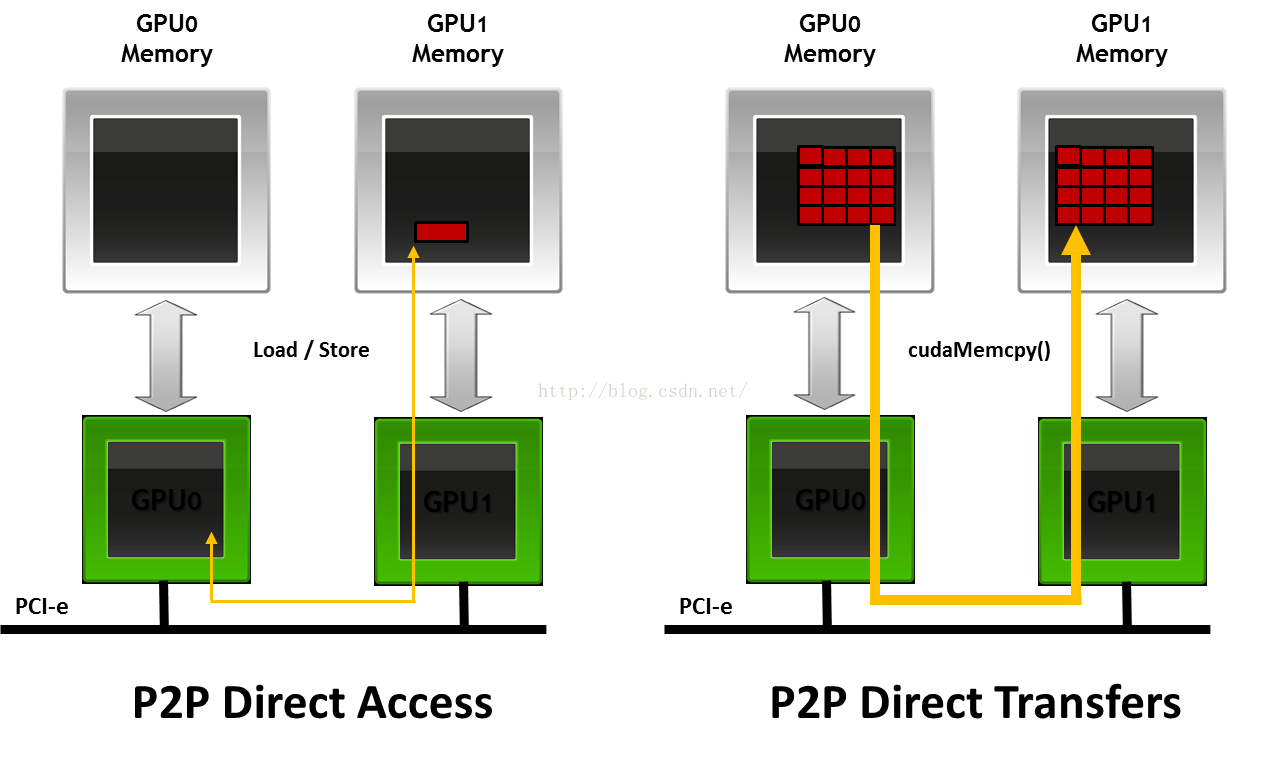
NVIDIA GPUDirect
1. 什么是GPUDirect? GPUDirect是GPU与其他设备通信的技术概括,包含了一系列的技术特性。我们在这里列举一下:

2. 2011年,增加了P2P特性,也就是我们刚才讲的GPU之间P2P的通信。因为取消了CPU内存的“媒介”功能,使得速度提升。
3. 2013年,引入了RDMA的特性,这个特性将使得GPU与第三方存储设备之间可以直接数据通信,同样取消了CPU内存的“媒介”功能。

测试用例
#include <stdio.h>
#include <stdlib.h>
#include <cuda_runtime.h>
#include <helper_functions.h>
#include <helper_cuda.h>
#include <helper_string.h> const int num = 1 << 25;
const int num_gpu = 2; int main()
{
int id_gpu;
float *data_d[num_gpu];
//malloc
for(id_gpu = 0; id_gpu < num_gpu; id_gpu++){
checkCudaErrors( cudaSetDevice(id_gpu) );
checkCudaErrors( cudaMalloc((void **)&data_d[id_gpu], num * sizeof(float)) );
}
//copy data from device 0 to device 1.
checkCudaErrors( cudaSetDevice(0) );
checkCudaErrors( cudaMemcpy(data_d[1], data_d[0], num * sizeof(float), cudaMemcpyDefault) );
//p2p copy data.
for (int i = 0; i < num_gpu; i++) {
int p2p;
for (int j = i+1; j < num_gpu; j++) {
checkCudaErrors( cudaDeviceCanAccessPeer(&p2p, i, j) );
if (p2p) {
printf("P2P support between device %d and %d.\n", i, j);
checkCudaErrors( cudaSetDevice(i) );
checkCudaErrors( cudaDeviceEnablePeerAccess(j, 0) );
checkCudaErrors( cudaSetDevice(j) );
checkCudaErrors( cudaDeviceEnablePeerAccess(i, 0) );
} else {
printf("No P2P support between device %d and %d.\n", i, j);
}
}
}
checkCudaErrors( cudaSetDevice(0) );
checkCudaErrors( cudaMemcpy(data_d[1], data_d[0], num * sizeof(float), cudaMemcpyDefault) ); //cudaFree
for(id_gpu = 0; id_gpu < num_gpu; id_gpu++){
checkCudaErrors( cudaSetDevice(id_gpu) );
checkCudaErrors( cudaFree(data_d[id_gpu]) );
} checkCudaErrors( cudaDeviceReset() );
return 0;
}
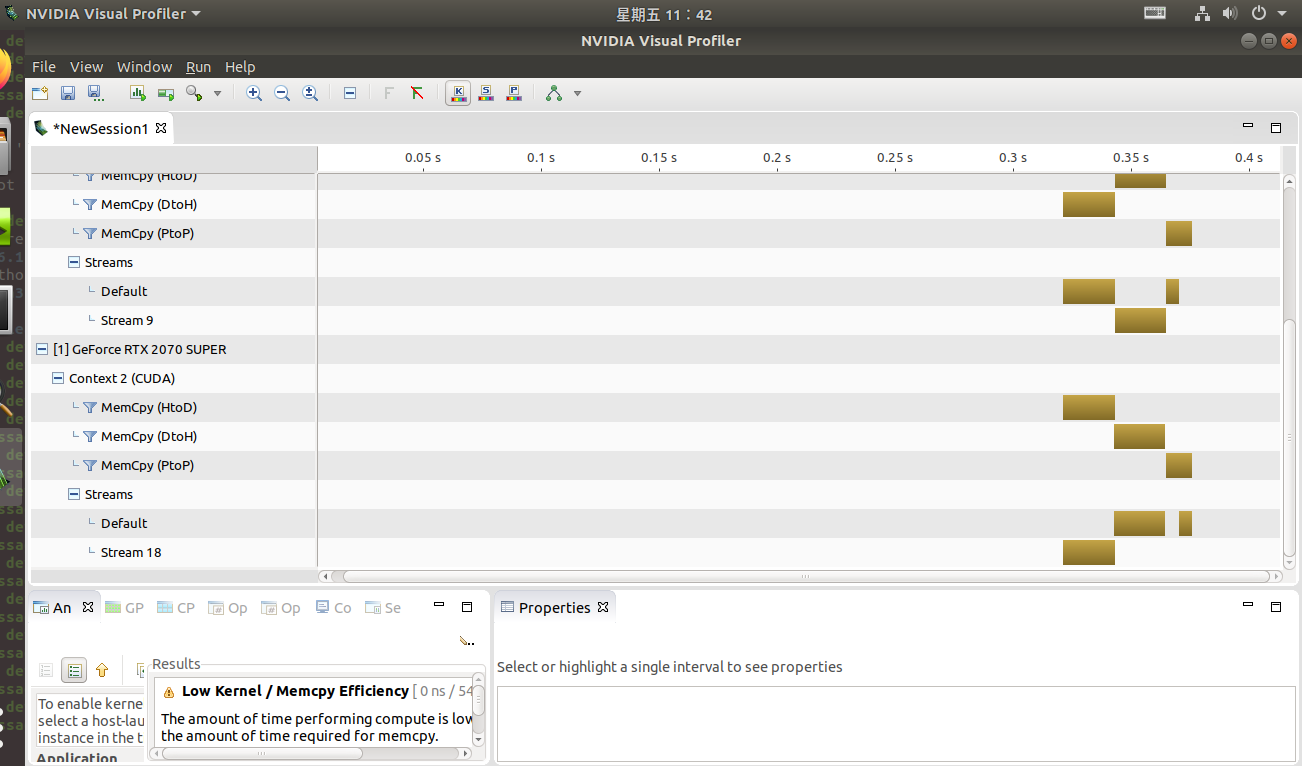
测试结果截图(nvvp):
--------------------------------------------------------------------------------
额外自测的代码:
#include <stdio.h>
#include <stdlib.h>
#include <cuda_runtime.h>
#include <helper_functions.h>
#include <helper_cuda.h>
#include <helper_string.h> const int num = 1 << 25;
const int num_gpu = 2; int main()
{
int id_gpu;
float *data_d[num_gpu];
//malloc
for(id_gpu = 0; id_gpu < num_gpu; id_gpu++){
checkCudaErrors( cudaSetDevice(id_gpu) );
checkCudaErrors( cudaMalloc((void **)&data_d[id_gpu], num * sizeof(float)) );
}
//copy data from device 0 to device 1.
checkCudaErrors( cudaSetDevice(0) );
checkCudaErrors( cudaMemcpy(data_d[1], data_d[0], num * sizeof(float), cudaMemcpyDefault) );
//copy data from device 1 to device 0.
checkCudaErrors( cudaSetDevice(1) );
checkCudaErrors( cudaMemcpy(data_d[0], data_d[1], num * sizeof(float), cudaMemcpyDefault) ); //p2p copy data.
for (int i = 0; i < num_gpu; i++) {
int p2p, p2p_0, p2p_1;
for (int j = i+1; j < num_gpu; j++) { checkCudaErrors( cudaDeviceCanAccessPeer(&p2p_0, i, j) );
checkCudaErrors( cudaDeviceCanAccessPeer(&p2p_1, j, i) );
p2p = p2p_0 & p2p_1; if (p2p) {
printf("P2P support between device %d and %d.\n", i, j);
checkCudaErrors( cudaSetDevice(i) );
checkCudaErrors( cudaDeviceEnablePeerAccess(j, 0) );
checkCudaErrors( cudaSetDevice(j) );
checkCudaErrors( cudaDeviceEnablePeerAccess(i, 0) );
} else {
printf("No P2P support between device %d and %d.\n", i, j);
}
}
} checkCudaErrors( cudaSetDevice(0) );
checkCudaErrors( cudaMemcpy(data_d[1], data_d[0], num * sizeof(float), cudaMemcpyDefault) );
checkCudaErrors( cudaSetDevice(1) );
checkCudaErrors( cudaMemcpy(data_d[0], data_d[1], num * sizeof(float), cudaMemcpyDefault) ); //syn
checkCudaErrors(cudaDeviceSynchronize()); //cudaFree
for(id_gpu = 0; id_gpu < num_gpu; id_gpu++){
checkCudaErrors( cudaSetDevice(id_gpu) );
checkCudaErrors(cudaDeviceDisablePeerAccess((id_gpu+1)%2));
checkCudaErrors( cudaFree(data_d[id_gpu]) );
} checkCudaErrors( cudaDeviceReset() );
return 0;
}




【转载】 GPU地址空间的相关概念的更多相关文章
- GPU体系架构(二):GPU存储体系
GPU是一个外围设备,本来是专门作为图形渲染使用的,但是随着其功能的越来越强大,GPU也逐渐成为继CPU之后的又一计算核心.但不同于CPU的架构设计,GPU的架构从一开始就更倾向于图形渲染和大规模数据 ...
- linux进程地址空间详解(转载)
linux进程地址空间详解(转载) 在前面的<对一个程序在内存中的分析 >中很好的描述了程序在内存中的布局,这里对这个结果做些总结和实验验证.下面以Linux为例(实验结果显示window ...
- 关于wcf,webservice,webapi或者其他服务或者接口有什么区别 WCF、WebAPI、WebService之间的区别 【转载】HTTP和SOAP完全就是两个不同的协议 WebService学习总结(一)——WebService的相关概念
wcf,webservice采用的是rpc协议,这个协议很复杂,所以每次要传递.要校验的内容也很复杂,别看我们用的很简单,但实际是frame帮我们做掉了rpc生成.解析的事情webapi遵循是rest ...
- 【转载】 GPU状态监测 nvidia-smi 命令详解
原文地址: https://blog.csdn.net/huangfei711/article/details/79230446 ----------------------------------- ...
- 【转载】 os.environ["CUDA_DEVICE_ORDER"] = "PCI_BUS_ID" os.environ["CUDA_VISIBLE_DEVICES"] = "0" (---------tensorflow中设置GPU可见顺序和选取)
原文地址: https://blog.csdn.net/Jamesjjjjj/article/details/83414680 ------------------------------------ ...
- 【转载】GPU深度发掘(一)::GPGPU数学基础教程
作者:Dominik Göddeke 译者:华文广 Contents 介绍 准备条件 硬件设备要求 软件设备要求 两者选择 初始化OpenGL GLUT OpenGL ...
- 【转载】 NVIDIA Tesla/Quadro和GeForce GPU比较
原文地址: https://blog.csdn.net/m0_37462765/article/details/74394932 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议 ...
- 双调排序--GPU/AIPU适合的排序【转载】
欢迎转载,转载请注明:本文出自Bin的专栏blog.csdn.net/xbinworld 技术交流QQ群:433250724,欢迎对算法.技术.应用感兴趣的同学加入 双调排序是data-indepen ...
- 【转载】GPU 加速下的图像处理
Instagram,Snapchat,Photoshop. 所有这些应用都是用来做图像处理的.图像处理可以简单到把一张照片转换为灰度图,也可以复杂到是分析一个视频,并在人群中找到某个特定的人.尽管这些 ...
- D3D9 GPU Hacks (转载)
D3D9 GPU Hacks I’ve been trying to catch up what hacks GPU vendors have exposed in Direct3D9, and tu ...
随机推荐
- Linux扩展篇-shell编程(五)-流程控制(三)-for语句
基本语法: 格式一 for(( 初始值; 循环控制条件; 变量变化)) do statements done 格式二 for 变量 in 值1 值2 值3 ... do statements done ...
- JavaScript执行模型笔记
JavaScript执行模型 引言 JavaScript是一个单线程(Single-threaded)异步(Asynchronous)非阻塞(Non-blocking)并发(Concurrent)语言 ...
- Mac 上切换 node 版本总结
Mac 上切换 node 版本总结 背景 在做项目的时候,往往会遇到老项目没有升级的问题,node环境版本比较低,自己电脑安装或者新项目安装了最新版本的 node 环境,那么既要支持老版本的使用也要支 ...
- elasticsearch-head插件安装及启动,关闭命令
启动插件 /elasticsearch-head目录npm run start启动elasticsearch 不能使用root账号 切换账号:su es./bin/elasticsearch 打印日志 ...
- java elasticsearch-rest-high-level-client 根据歌名搜索,创建索引,根据索引ID搜索
1.pom 导入jar <dependency> <groupId>org.elasticsearch.client</groupId> <artifactI ...
- 通俗理解GAN -- 基础认知
Smiling & Weeping ---- 你已春风摇曳,我仍一身旧雪 1.GAN的基本思想 GAN全称对抗生成网络,顾名思义是生成模型的一种,而他的训练则是一种对抗博弈状态中的.下面我们举 ...
- uniapp windows 上架 apple store
香蕉云 蒲公英 ios上架助手iOS Development 开发!先用上架助手在certificates里面生成一个p12文件在profiles里面生成mobileprovision文件就欧克了 需 ...
- Puremvc
Puremvc 框架unitypuremvc PureMVC健壮.易扩展.易维护 Many so-called Model-View-Controller frameworks today seem ...
- fseek在 fopen 带有'a'模式下不起作用
关于 fseek 在 追加写模式的注意事项 结论:fseek在 fopen 带有'a'模式的文件指针偏移不起作用. int main(int argc, char *argv[]) { FILE * ...
- Freertos学习:00-介绍
--- title: rtos-freertos-000-介绍 EntryName: rtos-freertos-00-about date: 2020-06-09 23:21:44 categori ...