MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言写。
视频演示:
http://v.youku.com/v_show/id_XMTcwNzQ5ODcxNg==.html
1.实验目的
研究智能小车结合红外探头寻迹前进。
2.实验材料
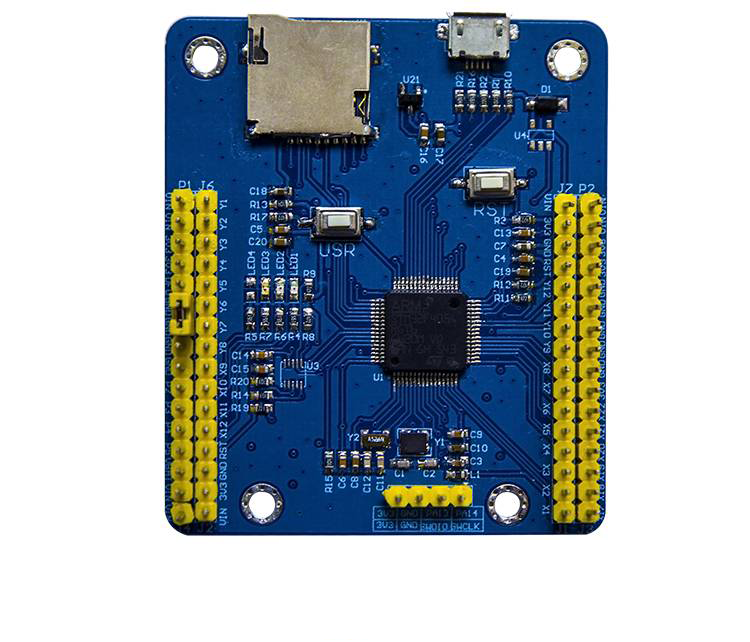
TPYBoard开发板1块(能跑python语言的开发板,小车的大脑。)
四路红外感应探头(小车的眼睛)。
数据线一根。
充电宝一个(给整个系统供电)。
智能小车底盘(包括驱动模块)。
杜邦线若干。
实验目的和实验材料准备齐了,先来介绍一下各个主要部件。
2.1PYBoard开发板
MicroPython是在单片机上可以跑的Python,也就是说,你可以通过Python脚本语言开发单片机程序。由剑桥大学的理论物理学家乔治·达明设计。和Arduino类似,但MicroPython更强大。MicroPython开发板让你可以通过Python代码轻松控制微控制器的各种外设,比如LED等,读取管脚电压,播放歌曲,和其他设备联网等等。TPYBoard是TurnipSmart公司制作的一款MicroPython开发板,这款开发板运行很流畅,关键是价格很便宜。
2.2四路红外感应探头
1、当模块检测到前方障碍物信号时,电路板上红色指示灯点亮,同时OUT端口持续输出低电平信号,该模块检测距离2~60cm,检测角度35°,检测距离可以通过电位器进行调节,顺时针调电位器,检测距离增加;逆时针调电位器,检测距离减少。
2、传感器属于红外线反射探测,因此目标的反射率和形状是探测距离的关键。其中黑色探测距离最小,白色最大;小面积物体距离小,大面积距离大。
3、传感器模块输出端口OUT可直接与单片机IO口连接即可,也可以直接驱动一个5V继电器模块或者蜂鸣器模块;连接方式:VCC-VCC;GND-GND;OUT-IO
4、比较器采用LM339,工作稳定;
5、可采用3.3V-5V直流电源对模块进行供电。当电源接通时,绿色电源指示灯点亮。
2.3智能小车底盘
双电机驱动,万向轮改变方向。这是实验中最常用到的小车底盘,使用差速的方法进行转弯。配合使用L298N电机驱动模块,使用方法很简单,不多做介绍。
3.寻迹原理
说完了原料的问题,下面说一下小车寻迹的原理。
3.1红外探头的安装
小车寻迹的原理其实就光的吸收,反射和散射。大家都知道,白色反射所有颜色的光,而黑色吸收所有颜色的光,这就为小车寻迹提供了有力的科学依据。在小车的车头上安装上红外探头(我是安装了四个),一字顺序排开。哪个探头接收不到反射或者散射回来的光时,说明这个探头此时正在黑色的寻迹带上。
3.2返回信号的判断
如果要是正前方的探头接收不到光,那么说明小车此时走在黑色的寻迹带上。可以使小车直线行走。如果左面的探头接收不到光,那么说明小车左面出现了黑色寻迹带,此时小车应该执行左转弯。右转弯同左转弯原理。
如果要是小车前面,左面,右面三个方向全都接收不到光,或者是两个方向上的探头都接收不到光,到底是左转弯,右转弯还是继续直行,这个就要看你自己在程序里怎么做判断了。
4.硬件接线:
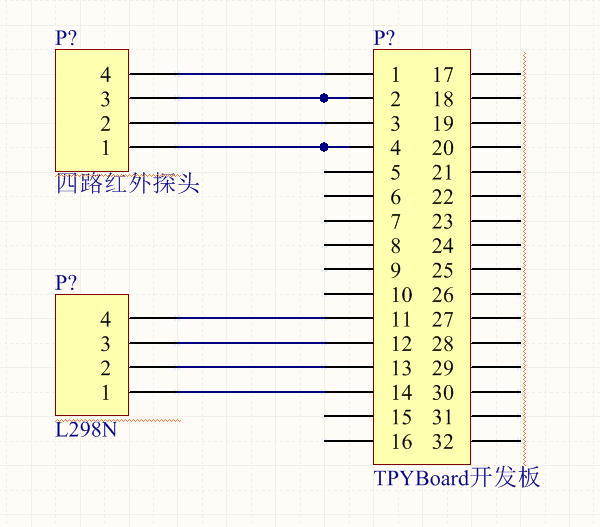
接线其实很简单四路红外探头接线很简单,虽然有十八根线,但是有十二根是三根三根的分成四组的,对应着很好接线,剩下的六根,VCC和GND不多说了,还有四根是直接接到单片结IO口上就可以的。 L298N的接线更简单了,这里不多介绍。
上个简单的帮助理解的原理图(其实我们做实验都是插线,不做PCB图和原理图的)。
再上个实物图给大家看看。
 5.运行与调试
5.运行与调试
制作完成后,剩下的就是该调试了,调试中应该注意细节和小车稳定性的优化。
6.代码编写
再把我写的程序给大家看一下,有需要的可以看一下。
源代码:
import pyb
from pyb import UART
from pyb import Pin M0 = Pin('X1', Pin.IN)
M1 = Pin('X2', Pin.IN)
M2 = Pin('X3', Pin.IN)
M3 = Pin('X4', Pin.IN)
N1 = Pin('Y1', Pin.OUT_PP)
N2 = Pin('Y2', Pin.OUT_PP)
N3 = Pin('Y3', Pin.OUT_PP)
N4 = Pin('Y4', Pin.OUT_PP) print('while')
while True:
print('while')
pyb.LED(4).off()
pyb.LED(3).off()
pyb.LED(2).off()
if(M0.value()==1):#检测到物体返回0。
pyb.LED(4).on()
pyb.delay(50)
N1.low()
N2.high()
N3.low()
N4.high()
pyb.delay(30)
#pyb.delay(5000)
if(M3.value()==1):#检测到物体返回0。
pyb.LED(3).on()
pyb.delay(50)
N1.high()
N2.low()
N3.high()
N4.low()
pyb.delay(30)
if(M2.value()&M1.value()==1):
pyb.LED(2).on()
N1.low()
N2.high()
N3.high()
N4.low()
pyb.delay(70)
MicroPython教程之TPYBoard开发板DIY红外寻迹小车的更多相关文章
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言 CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议.CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管 ...
- MicroPython实例之TPYBoard开发板控制OLED显示中文
0x00 前言 之前看到一篇文章是关于TPYBoard v102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近利用空余时间搞定了这个实验,特此将实验过程及源码分享出来,方便以 ...
- [MicroPython]TPYBoard开发板DIY小型家庭气象站
对于喜欢登山的人来说,都会非常关心自己所处的高度跟温度,海拔高度的测量方法,海拔测量一般常用的有两种方式,一是通过GPS全球定位系统,二是通过测出大气压,根据气压值算出海拔高度. BMP180是一直常 ...
- TPYBoard开发板搭建与阿里云服务发送数据
今天给大家带来的是TPYBoard V202开发板的一次测试项目使用心得.而测试项目就是给服务端发送硬件底层数据,而数据有产品名称,WF模块MAC地址,温湿度数据. 什么是MicroP ...
- Xamarin Anroid开发教程之Anroid开发工具及应用介绍
Xamarin Anroid开发教程之Anroid开发工具及应用介绍 Xamarin开发Anroid应用介绍 如今智能手机已经盛行了好几年,而针对这些智能手机的软件开发也变得异常火热.但是在Andro ...
- HealthKit开发快速入门教程之HealthKit开发概述简介
HealthKit开发快速入门教程之HealthKit开发概述简介 2014年6月2日召开的年度开发者大会上,苹果发布了一款新的移动应用平台,可以收集和分析用户的健康数据.该移动应用平台被命名为“He ...
随机推荐
- WPF水珠效果按钮组
效果图 相关知识 这部分基本就是废话,网上都能找到,我只不过是整理了以下.建议先不看,用到的时候可以回来看看 贝塞尔曲线 先来看两组图,有助于理解什么是贝塞尔曲线(图片取自维基百科,参考链接1) 二次 ...
- 多线程编程学习笔记——async和await(一)
接上文 多线程编程学习笔记——任务并行库(一) 接上文 多线程编程学习笔记——任务并行库(二) 接上文 多线程编程学习笔记——任务并行库(三) 接上文 多线程编程学习笔记——任务并行库(四) 通过前面 ...
- 来自Ext的UI边界识别函数constrain
//constrain函数 var min = 1 var max = 3; var num = 4; var result = Math.min(Math.max(num,min),max); co ...
- 在websphere上部署集群应用程序-工作记录
1) 创建web集群.client集群,添加集群托管节点,根据需求来,我的需求是两个应用部署到4个服务器上,属于1主3备模式 2) 创建webspere变量:选择你需要的集群作用域,新建资源 (作 ...
- git for c#,子文件的加入
private static void SubDirFile() { string wkDir = @"E:\DotNet2010\单位project\Git.Client\lib2Test ...
- 关于java以及JavaScript或者更多的语言中Data类的问题
关于java和JavaScript以及各类编程语言里Data类的月份问题,日子是从1开始数,但是星期和月份对应的周一和1月都不是1,这是为什么呢? 很多新手对此可能会不理解,老手觉得这没啥,但是我觉得 ...
- python运算符优先级问题
附上 对于or与and运算 其一, 在不加括号时候, and优先级大于or 其二, x or y 的值只可能是x或y. x为真就是x, x为假就是y 第三, x and y 的值只可能是x或y. x为 ...
- 【功能代码】---3 JS判断字符串是否包含某个字符串
JS判断字符串是否包含某个字符串 var str ="abc"; if(str.indexOf("bc")>-1){ alert('str中包含bc字符串 ...
- 【java】ArrayList、Iterator用法
package com.tn.collect; import java.util.ArrayList; import java.util.Iterator; class Product{ public ...
- 浅析c++和c语言的enum类型
1.先看c语言枚举类型 1.c语言定义枚举类型,每一个枚举元素都是一个整数2.注重数据类型,没有数据类型限定3.相邻枚举元素相差整数4.可以通过整数访问,不够安全 2.上代码: 1 #include& ...