DB Scan算法的分析与实现
摘自:http://www.cnblogs.com/weixliu/archive/2012/12/08/2808815.html
根据上面第二个数据集的簇的形状比较怪异,分簇结果应该是连起来的属于一个簇,但是k-means结果分出来很不如人意,所以这里介绍一种新的聚类方法,此方法不同于上一个基于划分的方法,基于划分主要发现圆形或者球形簇;为了发现任意形状的簇,用一个基于密度的聚类方法,这类方法将簇看做是数据空间中被低密度区域分割开的稠密对象区域,这一理念刚好也符合数据集的特征。
DBSCAN:一种基于高密度连通区域的基于密度的聚类方法,该算法将具有足够高密度的区域划分为簇,并在具有噪声的空间数据库中发现任意形状的簇。它将簇定义为密度相连的点的最大集合;为了理解基于密度聚类的思想,首先要掌握以下几个定义:
给定对象半径r内的邻域称为该对象的r邻域;
如果对象的r邻域至少包含最小数目MinPts的对象,则称该对象为核心对象;
给定一个对象集合D,如果p在q的r邻域内,并且q是一个核心对象,则我们说对象p从对象q出发是直接密度可达的;
如果存在一个对象链p1,p2,p3,...,pn,p1=q,pn=p,对于pi属于D,i属于1~n,p(i+1)是从pi关于r和MinPts直接密度可达的,则对象p是从对象q关于r和MinPts密度可达的;
如果存在对象o属于D,使对象p和q都是从o关于r和MinPts密度可达的,那么对于对象p到q是关于r和MinPts密度相连的;
密度可达是直接密度可达的传递闭包,这种关系非对称,只有核心对象之间相互密度可达;密度相连是一种对称的关系;
有了以上的概念接下来就是算法描述了:DBSCAN通过检查数据库中每点的r邻域来搜索簇。如果点p的r邻域包含的点多余MinPts个,则创建一个以p为核心对象的新簇。然后,DBSCAN迭代的聚集从这些核心对象直接密度可达的对象,这个过程可能涉及一些密度可达簇的合并。当没有新的点可以添加到任何簇时,该过程结束;
具体的伪代码描述如下(摘自维基百科):
DBSCAN(D, eps, MinPts)
C = 0
for each unvisited point P in dataset D //遍历
mark P as visited //已经访问
NeighborPts = regionQuery(P, eps) //计算这个点的邻域
if sizeof(NeighborPts) < MinPts //不能作为核心点
mark P as NOISE //标记为噪音数据
else //作为核心点,根据该点创建一个类别
C = next cluster
expandCluster(P, NeighborPts, C, eps, MinPts) //根据该核心店扩展类别 expandCluster(P, NeighborPts, C, eps, MinPts)
add P to cluster C //扩展类别,核心店先加入
for each point P' in NeighborPts //然后针对核心店邻域内的点,如果该点没有被访问,
if P' is not visited
mark P' as visited //进行访问
NeighborPts' = regionQuery(P', eps) //如果该点为核心点,则扩充该类别
if sizeof(NeighborPts') >= MinPts
NeighborPts = NeighborPts joined with NeighborPts'
if P' is not yet member of any cluster //如果邻域内点不是核心点,并且无类别,比如噪音数据,则加入此类别
add P' to cluster C regionQuery(P, eps) //计算邻域
return all points within P's eps-neighborhood
这个算法的时间复杂度的限制主要在于邻域的计算,如果存在索引,则能够降低时间复杂度,如果不存在索引,则邻域计算需要遍历所有点,这样时间复杂度就比较高,相当于双层的n的循环,所以时间复杂度为O(n2);
不过针对相同时间复杂度的时间,每个人的算法的运行时间也不尽相同,如果能够做很多的优化,一些常数时间的减少也能够减少时间,由于我这里仅仅是针对伪代码的实现,没有进行数据结构的优化,相对的数据结构也是利用了k-means用的数据结构进行了一些补充,比如添加一些基于密度需要的属性,比如是否被访问,是否为噪音,是否被添加至邻域中等等,跑起来针对数据集1的规模能够很快的得出结果,但是针对数据集2的数据量30W左右的点就存在很多问题,时间很慢,甚至不能容忍,release优化下好一些,debug下基本上无法等待出结果的,所以任何程序都要进行优化的,优化到你个人的最优;
接下来是这个算法的具体实现:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
|
COLORREF colorfultmp[]={RGB(192,192,192),RGB(255,255,0),RGB(227,207,87),RGB(255,153,18),RGB(235,142,85),RGB(255,227,132),RGB(255,97,0),RGB(176,224,230),RGB(65,105,230),RGB(0,255,255),RGB(56,94,15),RGB(8,46,84),RGB(128,42,42),RGB(34,139,34),RGB(160,32,240),RGB(255,0,0),RGB(176,48,96),RGB(176,23,31),RGB(0,0,0)};void Cluster::dbscan(vector<AbstractDataPT*> pts,double eps,int MinPts){ int categroy=0; int i,length=pts.size(); vector<AbstractDataPT*> neightpts,tmpneightpts; //遍历所有的点 for (i=0;i<length;i++) { //Sleep(1000); //如果没有访问,标记为访问 if (!pts[i]->m_bVisited) { pts[i]->m_bVisited=TRUE; //计算邻域 neightpts=pts[i]->regionQuery(pts,pts[i],eps); //include //噪音标记 if (neightpts.size()<MinPts) { pts[i]->categroy=0;//NOISE pts[i]->m_isNoise=TRUE; pts[i]->m_colorPT=colorfultmp[pts[i]->categroy%18]; } else { //核心点,聚类 categroy++; pts[i]->categroy=categroy; pts[i]->m_colorPT=colorfultmp[pts[i]->categroy%18]; //邻域内的点标记已经被添加 for (int k=0;k<neightpts.size();k++) { neightpts[k]->m_isInclude=TRUE; } //继续扩大此聚集类 int j=1; //因为邻域的规模组建增大,所以利用while while (j<neightpts.size()) { //没有类别则加入该类别,扩大的类别 if (neightpts[j-1]->categroy==0) { neightpts[j-1]->categroy=categroy; neightpts[j-1]->m_colorPT=colorfultmp[neightpts[j-1]->categroy%18]; } //标记访问 if (!neightpts[j-1]->m_bVisited) { neightpts[j-1]->m_bVisited=TRUE; //计算邻域 tmpneightpts=neightpts[j-1]->regionQuery(pts,neightpts[j-1],eps); //合并核心点的邻域 if (tmpneightpts.size()>=MinPts) { //合并 int m,n; //已经添加则不进行添加 for (m=0;m<tmpneightpts.size();m++) { /* if (tmpneightpts[m]->categroy==0) { neightpts.push_back(tmpneightpts[m]); } */ //不重复添加 //感觉这里限制程序时间的瓶颈 if (!tmpneightpts[m]->m_isInclude) { neightpts.push_back(tmpneightpts[m]); tmpneightpts[m]->m_isInclude=TRUE; } /* BOOL exist=FALSE; for (n=0;n<neightpts.size();n++) { if (tmpneightpts[m]==neightpts[n]) { exist=TRUE; } } if (!exist) { neightpts.push_back(tmpneightpts[m]); } */ } } } //继续 j++; } } } }} |
计算邻域的代码如下(循环所有点进行计算):
|
1
2
3
4
5
6
7
8
9
10
11
12
13
|
vector<AbstractDataPT*> DataPT2D::regionQuery(vector<AbstractDataPT*> pts,AbstractDataPT* pt,double eps){ vector<AbstractDataPT*> neighbor; int i,length=pts.size(); for (i=0;i<length;i++) { if (pt->calculateD(pts[i])<=eps) { neighbor.push_back(pts[i]); } } return neighbor;} |
时间表现非常慢,仍需要改进;
数据类型如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
|
#pragma once#include <vector>using namespace std;class AbstractDataPT{public: AbstractDataPT(void); virtual ~AbstractDataPT(void); virtual double calculateD(AbstractDataPT* otherPT)=0; virtual void drawSelf(CDC* pDc)=0; virtual void drawNormalSelf(CDC* pDc)=0; virtual vector<AbstractDataPT*> calculateMeans(vector<AbstractDataPT*> pts,int k)=0; virtual double calculateE(vector<AbstractDataPT*> pts,vector<AbstractDataPT*> kMeans)=0; virtual vector<AbstractDataPT*> regionQuery(vector<AbstractDataPT*> pts,AbstractDataPT* pt,double eps)=0;public: //属于哪一个类别 int categroy; COLORREF m_colorPT; BOOL m_bVisited; BOOL m_isInclude; BOOL m_isNoise;};#pragma once#include "abstractdatapt.h"class DataPT2D : public AbstractDataPT{public: DataPT2D(void); DataPT2D(double cx,double cy); DataPT2D(double cx,double cy,COLORREF color); ~DataPT2D(void); double calculateD(AbstractDataPT* otherPT); void drawSelf(CDC* pDc); void drawNormalSelf(CDC* pDc); vector<AbstractDataPT*> calculateMeans(vector<AbstractDataPT*> pts,int k); double calculateE(vector<AbstractDataPT*> pts,vector<AbstractDataPT*> kMeans); vector<AbstractDataPT*> regionQuery(vector<AbstractDataPT*> pts,AbstractDataPT* pt,double eps); double m_fCX; double m_fCY;}; |
release下经过N久之后终于有结果了,截图如下:

结果有点诡异,因为颜色只定义了18种,类别循环使用的颜色
修正:第二题目预处理的时候这里忽略了一些数据的问题,所以第二个数据集聚类出效果不是很好,这里修正一下,不只是取出白色的点,这里过滤条件增强,去除稍微浅色的点,这里暂时设置如下:
|
1
2
3
4
|
if (nCR>235&&nCG>235&&nCB>235) { continue; } |
这样处理还有一个好处就是过滤了一部分点,点的数量降低了;
这样就可以得到一个比较清晰的图像了,截图如下,这里图形进行了放大,所以显示出来有部分没有显示:

这里找到了一种提高时间效率的方法,书中给出的DBSCAN提高时间效率的方法是利用空间索引,这里查到一种RTree的方法,但是实现代价比较昂贵,而且不知道如何实现,下载了RTree实现的源代码有时间学习学习这一个数据结构~
这里存在另外一种方法同样提高效率,针对这个数据同样能够降低很多时间复杂度,针对此数据实现的较好应该能够达到线性时间,这里能够在5分钟内跑出结果,其实这也是很慢的了,因为我的程序实现很多地方比较冗余,比较杂乱,程序写的修改质量不高,也不好修改,5分钟已经达到我的目标,所以我就不进行修改了,如果你看到这个利用这个原理,也许能够达到一分钟以内的哟,亲;
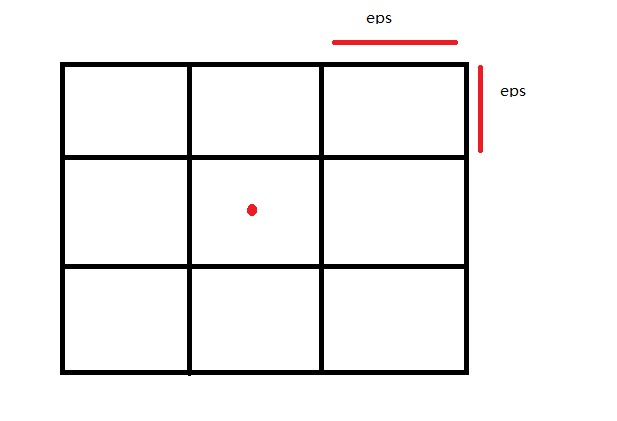
原理如下,针对每个点,计算其邻域的时候首先按照半径将图划分成矩形的格子;然后每个点只需要计算其周围的9个格子的内容,针对此数据可以看错做常数时间~预处理为线性;
主要代码如下:
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
|
vector<AbstractDataPT*> DataPT2D::regionQuery(vector<AbstractDataPT*> pts,AbstractDataPT* pt,double eps){ int index = regionNum(pt,eps); //index-1-x_2d_max/eps,index-x_2d_max/eps;index+1-x_2d_max/eps //index-1,index,index+1 //index-1+x_2d_max/eps,index+x_2d_max/eps;index+1+x_2d_max/eps int num = x_2d_max/eps; vector<AbstractDataPT*> tmp; int i,j,k,length=pts.size(); for (i=-1;i<2;i++) { for (j=-1;j<2;j++) { int tmpindex = index+i+num*j; if (tmpindex<0) { tmpindex=0; } int size = Region[tmpindex]->regionBy.size(); for (k=0;k<size;k++) { tmp.push_back(Region[index+i+num*j]->regionBy[k]); } } } vector<AbstractDataPT*> neighbor; length=tmp.size(); for (i=0;i<length;i++) { if (pt->calculateD(tmp[i])<=eps) { neighbor.push_back(tmp[i]); } } return neighbor;}int DataPT2D::regionNum(AbstractDataPT* pt,double eps){ //转换 DataPT2D* tmpDatapt=(DataPT2D*)pt; int x_index=tmpDatapt->m_fCX/eps; int y_index=tmpDatapt->m_fCY/eps; int num = x_2d_max/eps; int result=x_index+y_index*num; return result;} |
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
|
void Cluster::dbscan(vector<AbstractDataPT*> pts,double eps,int MinPts){ //清空region数据结构 Region.clear(); int categroy=0; int i,length=pts.size(); //初始化region数据结构 //这里直接将region初始化足够长,偷懒 for (i=0;i<BIGMAX;i++) { Region.push_back(new regionvector()); } //根据半径初始化Region数据 for(i=0;i<length;i++) { Region[pts[i]->regionNum(pts[i],eps)]->regionBy.push_back(pts[i]); //? } vector<AbstractDataPT*> neightpts,tmpneightpts; //遍历所有的点 for (i=0;i<length;i++) { //Sleep(1000); //如果没有访问,标记为访问 if (!pts[i]->m_bVisited) { pts[i]->m_bVisited=TRUE; //计算邻域 neightpts=pts[i]->regionQuery(pts,pts[i],eps); //include //噪音标记 if (neightpts.size()<MinPts) { pts[i]->categroy=0;//NOISE pts[i]->m_isNoise=TRUE; pts[i]->m_colorPT=colorfultmp[pts[i]->categroy%18]; } else { //核心点,聚类 categroy++; pts[i]->categroy=categroy; pts[i]->m_colorPT=colorfultmp[pts[i]->categroy%18]; //邻域内的点标记已经被添加 for (int k=0;k<neightpts.size();k++) { neightpts[k]->m_isInclude=TRUE; } //继续扩大此聚集类 int j=1; //因为邻域的规模组建增大,所以利用while while (j<neightpts.size()) { //没有类别则加入该类别,扩大的类别 if (neightpts[j-1]->categroy==0) { neightpts[j-1]->categroy=categroy; neightpts[j-1]->m_colorPT=colorfultmp[neightpts[j-1]->categroy%18]; } //标记访问 if (!neightpts[j-1]->m_bVisited) { neightpts[j-1]->m_bVisited=TRUE; //计算邻域 tmpneightpts=neightpts[j-1]->regionQuery(pts,neightpts[j-1],eps); //合并核心点的邻域 if (tmpneightpts.size()>=MinPts) { //合并 int m,n; //已经添加则不进行添加 for (m=0;m<tmpneightpts.size();m++) { /* if (tmpneightpts[m]->categroy==0) { neightpts.push_back(tmpneightpts[m]); } */ //不重复添加 //感觉这里限制程序时间的瓶颈 if (!tmpneightpts[m]->m_isInclude) { neightpts.push_back(tmpneightpts[m]); tmpneightpts[m]->m_isInclude=TRUE; } /* BOOL exist=FALSE; for (n=0;n<neightpts.size();n++) { if (tmpneightpts[m]==neightpts[n]) { exist=TRUE; } } if (!exist) { neightpts.push_back(tmpneightpts[m]); } */ } } } //继续 j++; } } } }} |
只是增加了根据半径初始化格子的代码,修改计算时候的部分,其他的均未修改;
DB Scan算法的分析与实现的更多相关文章
- 010 Editor v8.0.1(32 - bit) 算法逆向分析、注册机编写
010 Editor 的逆向分析整体算下来还是比较简单的,将程序拖入OD,通过字符串搜索定位到核心代码,经过分析,主要是如下图所示的两个关键函数,返回正确的值,才算是注册成功. 00409C9B 这个 ...
- 磁盘寻道时间算法之----------------SCAN算法和最短寻道时间优先调度算法
若干个等待访问磁盘者依次要访问的柱面编号为:80,40,74,14,60,31,61,假设每移动一个柱面需要4毫秒时间,移动到当前位于35号柱面,且当前的移动方向向柱面号增加的方向.请计算: (1)若 ...
- 深入浅出数据结构C语言版(17)——有关排序算法的分析
这一篇博文我们将讨论一些与排序算法有关的定理,这些定理将解释插入排序博文中提出的疑问(为什么冒泡排序与插入排序总是执行同样数量的交换操作,而选择排序不一定),同时为讲述高级排序算法做铺垫(高级排序为什 ...
- 3.2_k-近邻算法案例分析
k-近邻算法案例分析 本案例使用最著名的”鸢尾“数据集,该数据集曾经被Fisher用在经典论文中,目前作为教科书般的数据样本预存在Scikit-learn的工具包中. 读入Iris数据集细节资 ...
- 变动性算法源代码分析与使用示例(copy_backward、 transform、 replace_copy_if 等)
首先回顾前面的文章,我们把for_each 归类为非变动性算法,实际上它也可以算是变动性算法,取决于传入的第三个参数,即函数 指针.如果在函数内对容器元素做了修改,那么就属于变动性算法. 变动性算法源 ...
- 非变动性算法源代码分析与使用示例( for_each、min_element 、find_if、search 等)
非变动性算法代码分析与示例: 一.for_each C++ Code 1 2 3 4 5 6 7 8 9 10 11 12 13 14 // TEMPLATE FUNCTION for_eac ...
- 背景建模技术(二):BgsLibrary的框架、背景建模的37种算法性能分析、背景建模技术的挑战
背景建模技术(二):BgsLibrary的框架.背景建模的37种算法性能分析.背景建模技术的挑战 1.基于MFC的BgsLibrary软件下载 下载地址:http://download.csdn.ne ...
- 基于Qt的A*算法可视化分析
代码地址如下:http://www.demodashi.com/demo/13677.html 需求 之前做过一个无人车需要自主寻找最佳路径,所以研究了相关的寻路算法,最终选择A算法,因为其简单易懂, ...
- 凸包Graham Scan算法实现
凸包算法实现点集合中搜索凸包顶点的功能,可以处理共线情况,可以输出共线点也可以不输出而只输出凸包顶点.经典的Graham Scan算法,点排序使用极角排序方式,并对共线情况做特殊处理.一般算法是将共线 ...
随机推荐
- python 解压 压缩包
转 http://m.blog.csdn.net/blog/wice110956/26597179# 这里讨论使用Python解压如下五种压缩文件: .gz .tar .tgz .zip .rar ...
- 在Centos中部署redis运行状态图形化监控工具 — RedisLive
写在前面 前两天看到张善友老师的一篇文章<先定个小目标, 使用C# 开发的千万级应用>,里面给出了一张腾讯OA基础服务中redis运行情况的一张监控图,然后想到自己的项目中前不久也上了re ...
- instanceof操作符
instanceof是Java.php的一个二元操作符(运算符),和==,>,<是同一类东西.由于它是由字母组成的,所以也是Java的保留关键字.它的作用是判断其左边对象是否为其右边类的实 ...
- [codevs1743]反转卡片
[codevs1743]反转卡片 试题描述 [dzy493941464|yywyzdzr原创] 小A将N张卡片整齐地排成一排,其中每张卡片上写了1~N的一个整数,每张卡片上的数各不相同. 比如下图是N ...
- 一对一还是一对多? MVP设计前提
设计MVP之前,先要确定好以下模块之间是一对多还是一对一的关系: View ---> Presenter --> Model --> Interface(URL) 就是一个View只 ...
- 解决Unsupported major.minor version 51.0错误
解决Unsupported major.minor version 51.0错误使用jdk6运行项目时发生了Unsupported major.minor version 51.0错误.经过网上搜索发 ...
- 使用keychain保存用户名和密码等敏感信息 KeychainItemWrapper和SFHFKeychainUtils
iOS的keychain服务提供了一种安全的保存私密信息(密码,序列号,证书等)的方式,每个ios程序都有一个独立的keychain存储.相对于 NSUserDefaults.文件保存等一般方式,ke ...
- 12. UITextField
1. UITextField 的认识 UItextField通常用于外部数据输入,以实现人机交互.比如我们QQ.微信的登录界面中让你输入账号和密码的地方 2. UITextField 控件的属性设置 ...
- c#线程间操作无效: 从不是创建控件“textBox1”的线程访问它
线程开始前: Control.CheckForIllegalCrossThreadCalls = false;
- Spring+SpringMvc+Mybatis框架集成搭建教程
一.背景 最近有很多同学由于没有过SSM(Spring+SpringMvc+Mybatis , 以下简称SSM)框架的搭建的经历,所以在自己搭建SSM框架集成的时候,出现了这样或者那样的问题,很是苦恼 ...