移植mavlink协议到STM32详细教程
1准备材料,



#define MAVPACKED( __Declaration__ ) __pragma( pack(push,1)) __Declaration__ __pragma( pack(pop))
#define MAVPACKED( __Declaration__ ) __Declaration__


#defineinline __INLINE
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}int dcm_j =(dcm_i +1)%3;int dcm_k =(dcm_i +2)%3;float s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER void mavlink_dcm_to_quaternion(constfloat dcm[3][3],float quaternion[4]){int dcm_j,dcm_k;float s;float tr = dcm[0][0]+ dcm[1][1]+ dcm[2][2];if(tr >0.0f){float s = sqrtf(tr +1.0f);quaternion[0]= s *0.5f;s =0.5f/ s;quaternion[1]=(dcm[2][1]- dcm[1][2])* s;quaternion[2]=(dcm[0][2]- dcm[2][0])* s;quaternion[3]=(dcm[1][0]- dcm[0][1])* s;}else{/* Find maximum diagonal element in dcm* store index in dcm_i */int dcm_i =0;int i;for(i =1; i <3; i++){if(dcm[i][i]> dcm[dcm_i][dcm_i]){dcm_i = i;}}dcm_j =(dcm_i +1)%3;dcm_k =(dcm_i +2)%3;s = sqrtf((dcm[dcm_i][dcm_i]- dcm[dcm_j][dcm_j]-dcm[dcm_k][dcm_k])+1.0f);quaternion[dcm_i +1]= s *0.5f;s =0.5f/ s;quaternion[dcm_j +1]=(dcm[dcm_i][dcm_j]+ dcm[dcm_j][dcm_i])* s;quaternion[dcm_k +1]=(dcm[dcm_k][dcm_i]+ dcm[dcm_i][dcm_k])* s;quaternion[0]=(dcm[dcm_k][dcm_j]- dcm[dcm_j][dcm_k])* s;}}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);uint8_t*ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
MAVLINK_HELPER uint16_t mavlink_msg_to_send_buffer(uint8_t*buffer,constmavlink_message_t*msg){uint8_t*ck;memcpy(buffer,(constuint8_t*)&msg->magic, MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck = buffer +(MAVLINK_NUM_HEADER_BYTES +(uint16_t)msg->len);ck[0]=(uint8_t)(msg->checksum &0xFF);ck[1]=(uint8_t)(msg->checksum >>8);return MAVLINK_NUM_NON_PAYLOAD_BYTES +(uint16_t)msg->len;}
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_int8_t(msg, wire_offset)(constint8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(constuint8_t)_MAV_PAYLOAD(msg)[wire_offset]
#define _MAV_RETURN_char(msg, wire_offset)(constchar)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_int8_t(msg, wire_offset)(int8_t)_MAV_PAYLOAD(msg)[wire_offset]#define_MAV_RETURN_uint8_t(msg, wire_offset)(uint8_t)_MAV_PAYLOAD(msg)[wire_offset]
移植mavlink协议到STM32详细教程的更多相关文章
- 移植mavlink到stm32详细教程,后面附快速移植方法
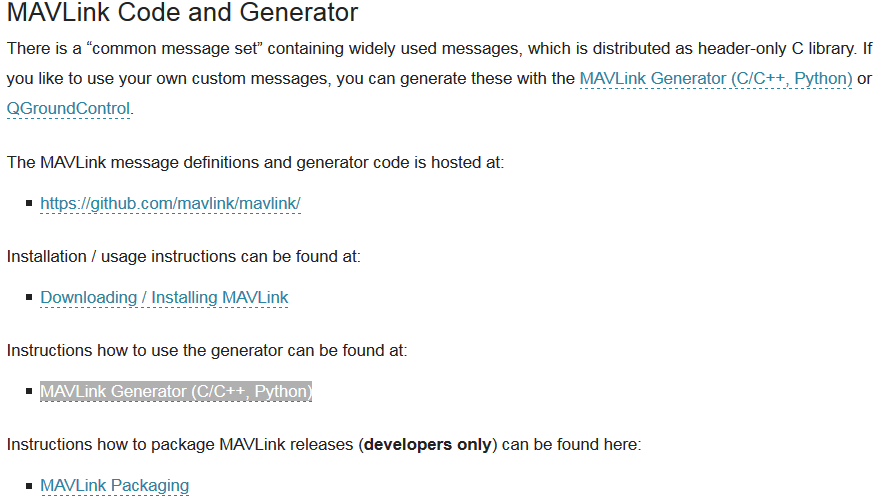
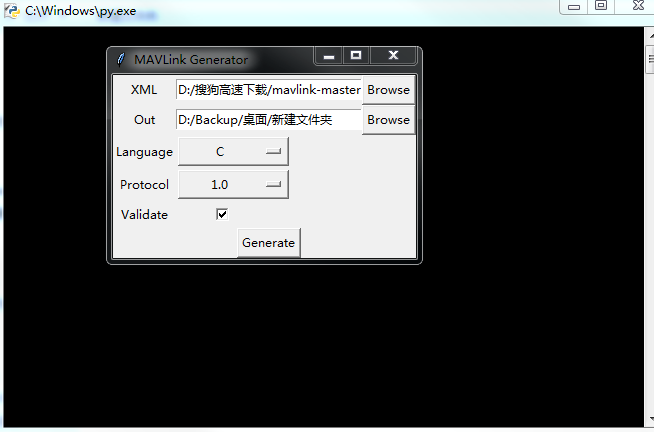
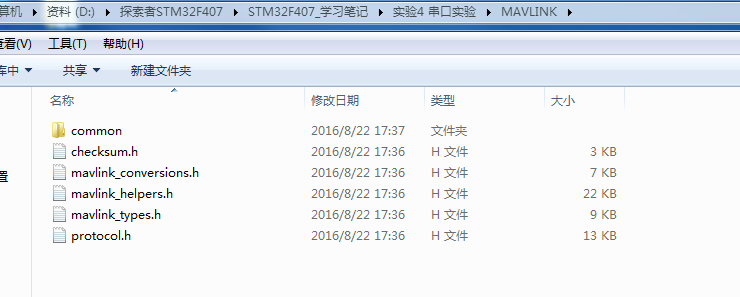
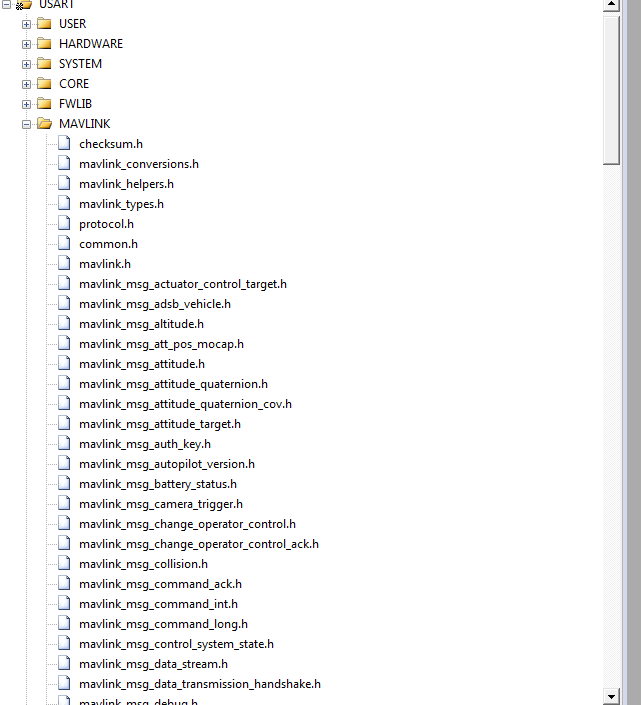
一:准备材料: mavlink源码 stm32串口程序 1.mavlink源码: a.进入mavlink官网(http://qgroundcontrol.org/mavlink/s ...
- 移植MAVLINK到STM32详细教程之三
在前面教程的基础上继续移植优化,之前的没有加缓冲区,没有接收函数功能,这里进行统一的讲解 作者:恒久力行 qq:624668529 缓冲区对于接 ...
- Xilinx zynq-7000系列FPGA移植Linux操作系统详细教程
Xilinx zynq-7000系列FPGA移植Linux操作系统详细教程 一:前言 最近手上压了一块米联客的Miz7035,一块xilinx zynq-7000系列的开发板,想着正好学习一下linu ...
- mavlink协议移植问题
mavlink协议移植问题 mavlink源代码是一个代码库,使用的时候只需要将mavlink.h头文件包含到工程项目中即可. mavlink通信协议是无状态的连接,一般采用心跳消息跟踪系统是否存在. ...
- git详细教程
Table of Contents 1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 Git配置 1.3.1 ...
- GitHub详细教程(转载)
1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 Git配置 1.3.1 用户信息 1.3.2 高亮显示 1 ...
- GitHub详细教程
GitHub详细教程 Table of Contents 1 Git详细教程 1.1 Git简介 1.1.1 Git是何方神圣? 1.1.2 重要的术语 1.1.3 索引 1.2 Git安装 1.3 ...
- 【原创】车载实时路况信息接收终端移植于Smart210开发板 --- 综合教程
[原创]车载实时路况信息接收终端移植于Smart210开发板 --- 综合教程 所用工具: windows电脑 Ubuntu12.04 Smart210开发板 4g以上SD卡 U盘 步骤: 1. ...
- Ymodem协议(参考STM32)
相信很多人都希望,不开盖就可以对固件进行升级吧,就像手机那些.下文中的bootload就来实现这样的功能. 前段时间有项目关于Bootload设计.所以就仔细的去了研究了一翻.以前都是用的stm32官 ...
随机推荐
- tcpdump网络数据抓包
tcpdump,就是:dump the traffic on a network,根据使用者的定义对网络上的数据包进行截获的包分析工具. tcpdump可以将网络中传送的数据包的“头”完全截获下来提供 ...
- Reporting Services无法连接ORACLE,提示:System.Data.OracleClient 需要 Oracle 客户端软件 8.1.7 或更高版本
Reporting Services无法连接ORACLE,在服务器安装ORACLE 11客户端版本后仍然提示以下错误: System.Data.OracleClient 需要 Oracle 客户端软件 ...
- java连接sqlserver2005数据库
java连接sqlserver2005数据库 首先得下载驱动程序到微软网站下载Microsoft JDBC Driver 4.0 for SQL Server 下载地址 :http://msdn. ...
- 11、perl语言的记录分割符$/ $\
参考:https://www.jianshu.com/p/8ffd53b1bd41 perl自带的perldoc文档.perldoc -v '$/' :perldoc -f join $/ #输入记 ...
- python笔记——均值、方差、中位数计算
from __future__ import print_function # 均值计算 data = [3.53, 3.47, 3.51, 3.72, 3.43] average = float(s ...
- Spring入门第六课
XML配置里的Bean自动装配 Spring IOC容器可以自动装配Bean.需要做的仅仅是在<bean>的autowire属性里指定自动装配的模式 ByType(根据类型自动装配):若I ...
- hdu1058
#include<iostream> #include<string> using namespace std; int const N = 4; int map[N] = { ...
- C# 字节转换
1.字符串与字节数组 System.Text.Encoding.UTF-8.GetBytes() 汉字转换后3个字节,数字转换和数字位数一样 GetString() 2.Int32值类型与字节数组 B ...
- CentOS6.5内核升级FATAL: Module scsi_wait_scan not found
系统为CentOS6.5的虚拟机内核升级至版本4.6.0-1,重启后,报以下错误: Module scsi_wait_scan not found. 无法进入系统. 问题描述详见:Known Issu ...
- 二进制数(dp,记忆化搜索)
二进制数(dp,记忆化搜索) 给定k个<=1e6的正整数x(k不大于10),问最小的,能被x整除且只由01组成的数. 首先,dp很好写.用\(f[i][j]\)表示i位01串,模ki的值是j的数 ...