强化学习--Policy Gradient
Policy Gradient综述:
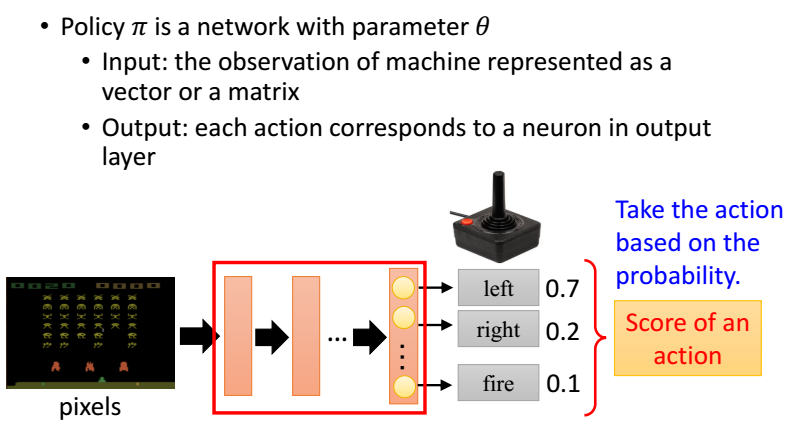
Policy Gradient,通过学习当前环境,直接给出要输出的动作的概率值。
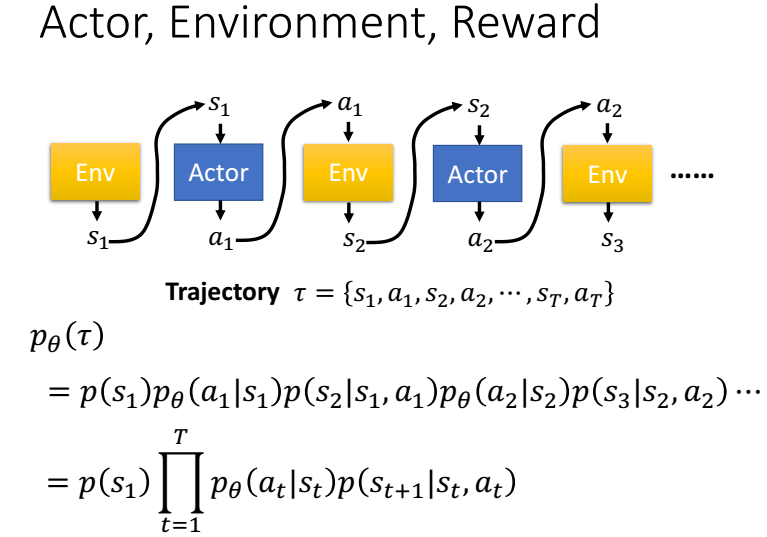
Policy Gradient 不是单步更新,只能等玩完一个epoch,再更新参数,采取动作与动作评价是同一个函数,所以是一个on-policy
Policy Gradient 需要计算每一个state的期望reward,这个期望reward通过整个epoch的reward_list计算。所以只能等玩完1个epoch才能更新。
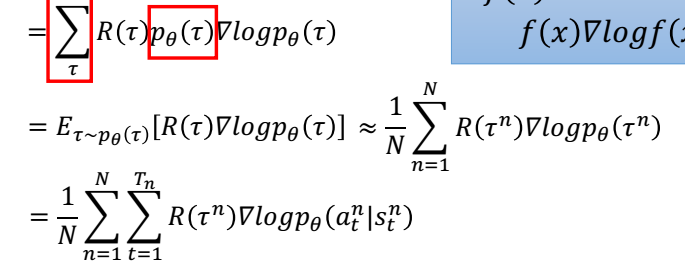
数学推导
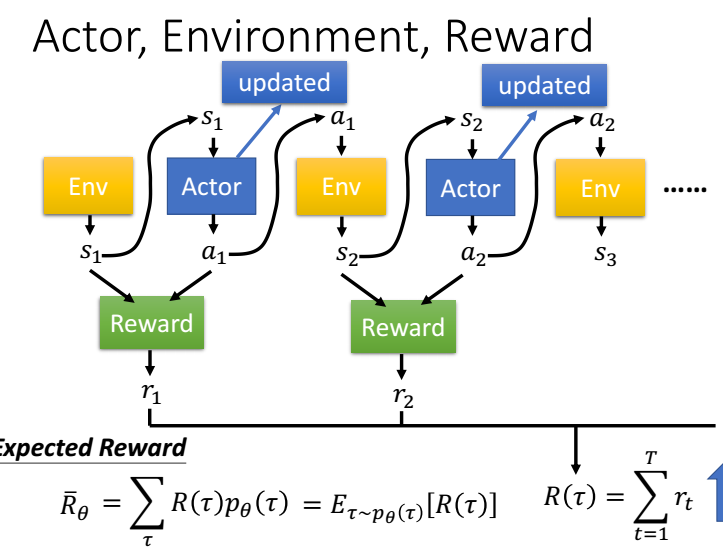
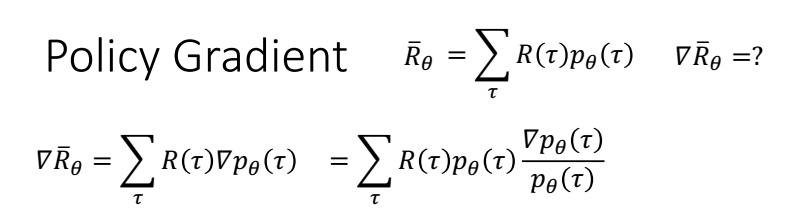
最大化R,,用梯度下降,需要求R的梯度。
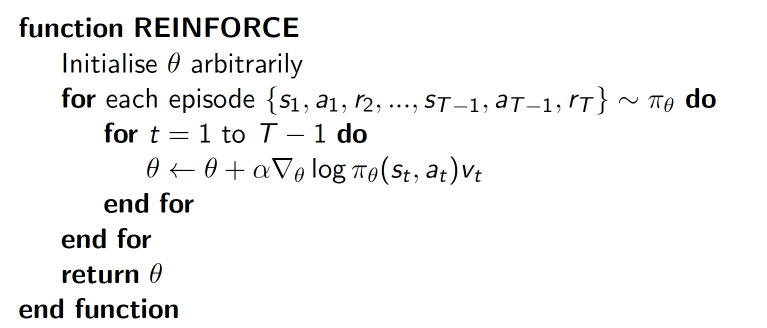
vt的计算
Policy Gradient 不是单步更新,只能等玩完一个epoch,得到每个epoch的observation_list \ action\_list reward_list
学习的时候,根据这三个list更新参数,其中下图公式中的vt 根据reward_list算出来。
vt的计算
Policy Gradient 不是单步更新,只能等玩完一个epoch,得到每个epoch的observation_list \ action\_list reward_list
学习的时候,根据这三个list更新参数,其中下图公式中的vt 根据reward_list算出来。
实现方式
神经网络分类模型,但是在算loss 的时候,logloss需要乘一个系数vt,这个系数与奖励Reward相关,如果采用当前动作,
在接下来的游戏中获得的Reward越大,那么在更新梯度的时候加大当前梯度下降的速度。
算法步骤
vt的计算
Policy Gradient 不是单步更新,只能等玩完一个epoch,得到每个epoch的observation_list \ action\_list reward_list
学习的时候,根据这三个list更新参数,其中下图公式中的vt 根据reward_list算出来。
代码
"""
This part of code is the reinforcement learning brain, which is a brain of the agent.
All decisions are made in here. Policy Gradient, Reinforcement Learning. View more on my tutorial page: https://morvanzhou.github.io/tutorials/ Using:
Tensorflow: 1.0
gym: 0.8.0
""" import numpy as np
import tensorflow as tf # reproducible
np.random.seed(1)
tf.set_random_seed(1) class PolicyGradient:
def __init__(
self,
n_actions,
n_features,
learning_rate=0.01,
reward_decay=0.95,
output_graph=False,
):
self.n_actions = n_actions
self.n_features = n_features
self.lr = learning_rate
self.gamma = reward_decay #每个epoch的observation \ action\ reward
self.ep_obs, self.ep_as, self.ep_rs = [], [], [] self._build_net() self.sess = tf.Session() if output_graph:
# $ tensorboard --logdir=logs
# http://0.0.0.0:6006/
# tf.train.SummaryWriter soon be deprecated, use following
tf.summary.FileWriter("logs/", self.sess.graph) self.sess.run(tf.global_variables_initializer()) def _build_net(self):
with tf.name_scope('inputs'):
self.tf_obs = tf.placeholder(tf.float32, [None, self.n_features], name="observations")
self.tf_acts = tf.placeholder(tf.int32, [None, ], name="actions_num")
self.tf_vt = tf.placeholder(tf.float32, [None, ], name="actions_value")
# fc1
layer = tf.layers.dense(
inputs=self.tf_obs,
units=10,
activation=tf.nn.tanh, # tanh activation
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc1'
)
# fc2
all_act = tf.layers.dense(
inputs=layer,
units=self.n_actions,
activation=None,
kernel_initializer=tf.random_normal_initializer(mean=0, stddev=0.3),
bias_initializer=tf.constant_initializer(0.1),
name='fc2'
) self.all_act_prob = tf.nn.softmax(all_act, name='act_prob') # use softmax to convert to probability with tf.name_scope('loss'):
# to maximize total reward (log_p * R) is to minimize -(log_p * R), and the tf only have minimize(loss)
neg_log_prob = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=all_act, labels=self.tf_acts) # this is negative log of chosen action
# or in this way:
# neg_log_prob = tf.reduce_sum(-tf.log(self.all_act_prob)*tf.one_hot(self.tf_acts, self.n_actions), axis=1)
loss = tf.reduce_mean(neg_log_prob * self.tf_vt) # reward guided loss with tf.name_scope('train'):
self.train_op = tf.train.AdamOptimizer(self.lr).minimize(loss) def choose_action(self, observation):
prob_weights = self.sess.run(self.all_act_prob, feed_dict={self.tf_obs: observation[np.newaxis, :]})
action = np.random.choice(range(prob_weights.shape[1]), p=prob_weights.ravel()) # select action w.r.t the actions prob
return action def store_transition(self, s, a, r):
self.ep_obs.append(s)
self.ep_as.append(a)
self.ep_rs.append(r) def learn(self):
# discount and normalize episode reward
discounted_ep_rs_norm = self._discount_and_norm_rewards() # train on episode
self.sess.run(self.train_op, feed_dict={
self.tf_obs: np.vstack(self.ep_obs), # shape=[None, n_obs]
self.tf_acts: np.array(self.ep_as), # shape=[None, ]
self.tf_vt: discounted_ep_rs_norm, # shape=[None, ]
}) self.ep_obs, self.ep_as, self.ep_rs = [], [], [] # empty episode data
return discounted_ep_rs_norm def _discount_and_norm_rewards(self):
# discount episode rewards
discounted_ep_rs = np.zeros_like(self.ep_rs)
running_add = 0
for t in reversed(range(0, len(self.ep_rs))):
running_add = running_add * self.gamma + self.ep_rs[t]
discounted_ep_rs[t] = running_add # normalize episode rewards
discounted_ep_rs -= np.mean(discounted_ep_rs)
discounted_ep_rs /= np.std(discounted_ep_rs)
return discounted_ep_rs
强化学习--Policy Gradient的更多相关文章
- 深度增强学习--Policy Gradient
前面都是value based的方法,现在看一种直接预测动作的方法 Policy Based Policy Gradient 一个介绍 karpathy的博客 一个推导 下面的例子实现的REINFOR ...
- 强化学习(十三) 策略梯度(Policy Gradient)
在前面讲到的DQN系列强化学习算法中,我们主要对价值函数进行了近似表示,基于价值来学习.这种Value Based强化学习方法在很多领域都得到比较好的应用,但是Value Based强化学习方法也有很 ...
- 深度学习课程笔记(十三)深度强化学习 --- 策略梯度方法(Policy Gradient Methods)
深度学习课程笔记(十三)深度强化学习 --- 策略梯度方法(Policy Gradient Methods) 2018-07-17 16:50:12 Reference:https://www.you ...
- 强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods)
强化学习读书笔记 - 13 - 策略梯度方法(Policy Gradient Methods) 学习笔记: Reinforcement Learning: An Introduction, Richa ...
- Deep Learning专栏--强化学习之从 Policy Gradient 到 A3C(3)
在之前的强化学习文章里,我们讲到了经典的MDP模型来描述强化学习,其解法包括value iteration和policy iteration,这类经典解法基于已知的转移概率矩阵P,而在实际应用中,我们 ...
- 深度学习-深度强化学习(DRL)-Policy Gradient与PPO笔记
Policy Gradient 初始学习李宏毅讲的强化学习,听台湾的口音真是费了九牛二虎之力,后来看到有热心博客整理的很细致,于是转载来看,当作笔记留待复习用,原文链接在文末.看完笔记再去听一听李宏毅 ...
- 强化学习七 - Policy Gradient Methods
一.前言 之前我们讨论的所有问题都是先学习action value,再根据action value 来选择action(无论是根据greedy policy选择使得action value 最大的ac ...
- 深度学习课程笔记(十四)深度强化学习 --- Proximal Policy Optimization (PPO)
深度学习课程笔记(十四)深度强化学习 --- Proximal Policy Optimization (PPO) 2018-07-17 16:54:51 Reference: https://b ...
- DRL之:策略梯度方法 (Policy Gradient Methods)
DRL 教材 Chpater 11 --- 策略梯度方法(Policy Gradient Methods) 前面介绍了很多关于 state or state-action pairs 方面的知识,为了 ...
随机推荐
- odoo 权限设置
*权限管理的四个层次 # 菜单级别:不属于指定菜单所包含组的用户看不到该菜单,不客全,只是隐藏 菜单,若知道菜单ID,仍然可以通过指定URL访问 # 对象级 ...
- 抽屉之Tornado实战(4)--发帖及上传图片
对于链接,点击获取标题时,本质发送ajax请求,然后去链接抓取信息,发布又是发送ajax请求 发布信息,还要有发布者的信息,并在信息表需要记录发布者的用户名,发布者的头像,发布者的id,而这些信息可以 ...
- LeetCode 953 Verifying an Alien Dictionary 解题报告
题目要求 In an alien language, surprisingly they also use english lowercase letters, but possibly in a d ...
- Struts2中.properties文件放置路径(classpath)
一.web应用的classpath简介 classpath路径,即WEB-INF下面的classes目录,所有src目录下面的java.xml.properties等文件编译后都会在此. Stru ...
- Master-Worker集群计算demo
Task为要执行的任务实体类: package com.viewhigh.mdop.bi.test; /** * Created by zzq on 2017/5/11. */ public clas ...
- 【python基础】sys
sys模块 参考: https://blog.csdn.net/qq_38526635/article/details/81739321 http://www.cnblogs.com/cherishr ...
- MyBatis的核心组件
MyBatis的核心组件主要分为4个部分 SqlSessionFactoryBuilder(构造器):它会根据配置或者代码来生成SqlSessionFactory,采用的是分步构建的Builder模式 ...
- Docker 容器(六)
镜像(Image)和容器(Container)的关系,就像是面向对象程序设计中的 类 和 实例 一样,镜像是静态的定义,容器是镜像运行时的实体.容器可以被创建.启动.停止.删除.暂停等. 容器的实质是 ...
- Machine Learning in action --LogisticRegession 逻辑回归
本系列主要参考<机器学习实战>,使用python3编译环境,实现书中的相关代码. 1.基本算法 关于梯度上升算法和随机梯度上升算法的选择: 当数据集较小时,使用梯度上升算法: 当数据集较大 ...
- 初识Shell与Shell脚本
初识Shell Shell 是一个用 C 语言编写的程序,Shell 既是一种命令语言,又是一种程序设计语言. Shell 是指一种应用程序,这个应用程序提供了一个界面,用户通过这个界面访问操作系统内 ...