TPS6116x 1-wire总线的分析与驱动实现
1-wire总线的特点
1-wire协议是用一条数据线作为总线进行数据通信的协议。
1-wire总线有以下特点:
1. 可以组建网络,个数没有限制。
2. 使用GPIO的特性就可以,不需要专门的控制器。
3. 总线网络中只有一个主动设备,其它设备均为从设备。主设备发起通信,从设备应答。从设备不能发起通信。
4. 属于串行异步通信。
5. 通信时序严格,在操作系统中,必须在数据通信阶段阶段关闭调度(调度带来的延迟可以能有数毫秒,将破坏时序)。
6. 不同的1-wire设备,通信协议和时序很可能不一样。组建网络时,确保使用遵守相同协议和时序的设备。
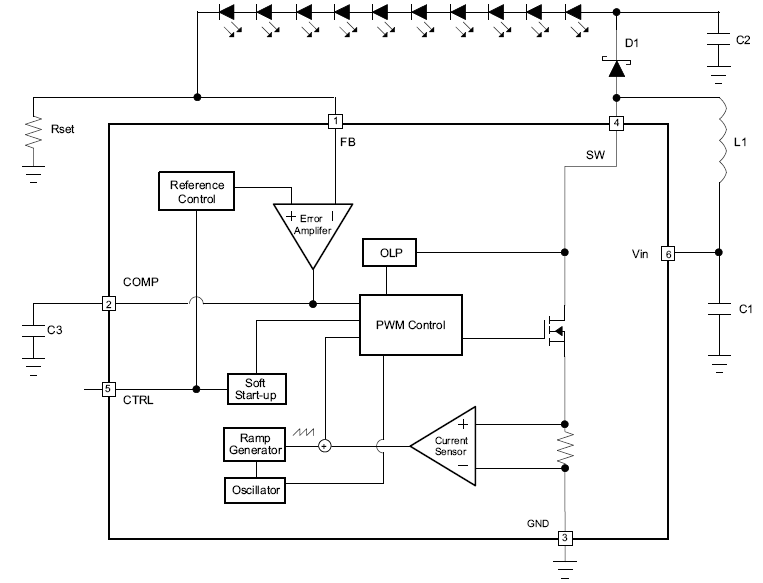
TPS6116x的功能框图
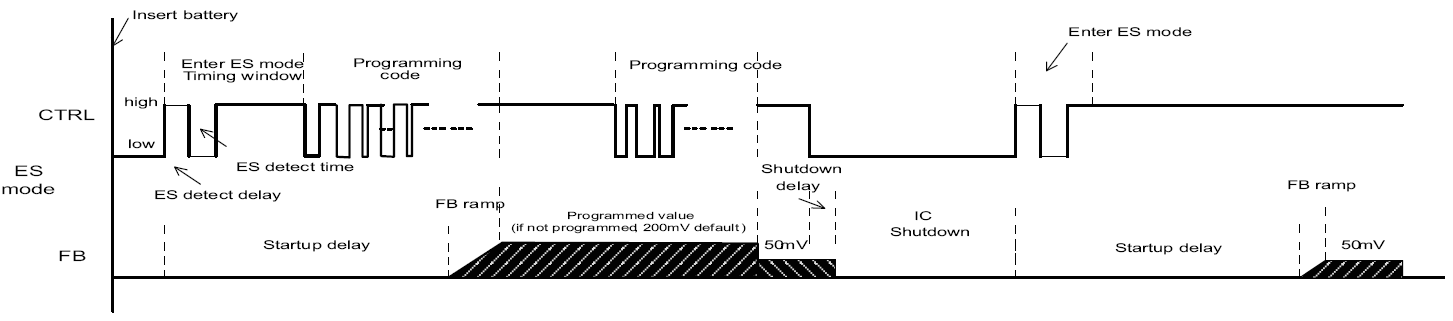
1. 从上电谈起
上电后,默认工作在PWM模式,参考电压为200mV. 如果要让设备工作在1-wire模式,则要按照时序要求设置CTRL。
上电的时候,如果CTRL是高电平,对是否1-wire模式的侦测被立即触发。如果CTRL不符合时序要求,则退出侦测。
任何时候,如果CTRL是低电平,且维持2.5ms以上,则设备关机。
2. 无论是PWM模式,还是1-wire模式,都是在设置参考电压(Reference Control).
FB的目标值是参考电压(Error Amplier)。FB与参考电压的误差值被输入PWM Control,以修正PWM的有效宽度。
3. Rset电阻用来调整最大亮度。参考电压的最大值为200mV,这样,如果Rset的阻值为10欧姆,那么LED的最大电流是20mA。
4. PWM的频率是600KHz.
5. 设备Shut down的时候(CTRL一直为低),没有PWM输出。Vin可以直接流向LED.所以Vin在设计上要小于LEDs的开启电压。
6. 设备从Shut down状态复位时(CTRL变高触发复位,设备开机)。开机时如果FB寄存器值(用来设置参考电压的寄存器)为0(范围0-31),则FB寄存器被设定为31(200mV)。
开机时如果FB寄存器不为0,则不会修改FB寄存器的值。Datasheet中指出,不要直接设定FB寄存器值为0,如果想关机,可以令设备Shutdown(CTRL置低2.5ms)。
7. Soft start-up控制电路控制电压一级一级往上升,以避免电流冲击。
TPS6116x的时序
在TPS6116x的Datasheet中,6.6节详细列出时序要求。
| 名字 | 含义 | 电平 | 最小值 | 最大值 | 单位 |
| tvalACKN | ACK准备时间,从设备在此区间准备ACK. TPS6116x只有在数据最高位(RFA)为1时,从设备返回ACK。并且从设备是OpenDrain输出的。 | 高 | 2 | us | |
| tACKN | ACK的有效区间。数据线被从设备拉低。 | 低 | 512 | us | |
| toff | 设备关机时间。相当于电脑的长按开机键进行强制关机。 | 低 | 2500 | us | |
| tes_det | EasyScale模式侦测的真正开始。260us超过PWM模式的最大低电平宽度(5kHz, 200us). | 低 | 260 | 2500 | us |
| tes_delay | TPS6116x从Shutdown状态退出(2.5ms后变高)时开始侦测EasyScale模式的进入。必须维持至少100us的高位。也可能一直高。 | 高 | 100 | us | |
| tes_win | EasyScale模式侦测的总体时间。TPS6116x从Shutdown状态退出(2.5ms后变高)时开始侦测EasyScale模式的进入。包括tes_delay和tes_det。 | 1000 | us | ||
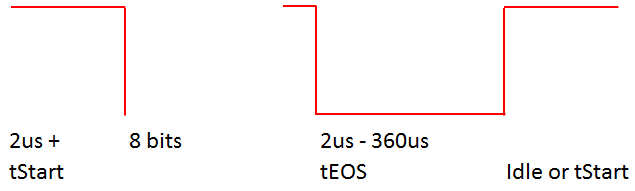
| tSTART | 字节处理的预备时间。也可以理解为字节之间的间隔。 | 高 | 2 | us | |
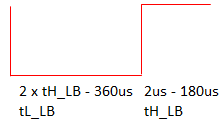
| tEOS | 字节的结束。相当于UART的STOP位。 | 低 | 2 | 360 | us |
| tH_LB | 逻辑0的高电平时间 | 高 | 2 | 180 | us |
| tL_LB | 逻辑0的低电平时间 | 低 | 2 × tH_LB | 360 | us |
| tL_HB | 逻辑1的低电平时间 | 低 | 2 | 180 | us |
| tH_HB | 逻辑1的高电平时间 | 高 | 2 × tL_HB | 360 | us |
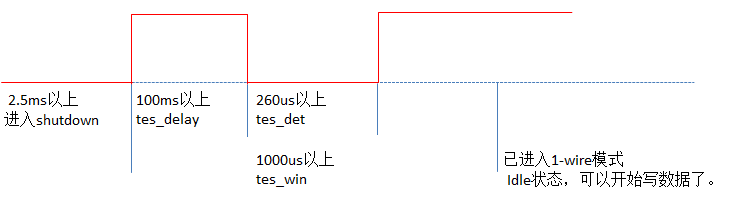
1. 上电
如果CTRL PIN引脚电平是高,进入tes_win,开始判断是进入EasyScale的1-wire模式,还是进入PWM模式。
如果CTRL PIN引脚电平是低,2.5ms之后设备shutdown,进入低耗电模式。
2. 进入EasyScale的1-wire模式。
1. 为了避免不确定的时序状态,先置CTRL PIN引脚电平为低3秒。设备进入shutdown状态。
static void tps6116_shutdown(unsigned int gpio) {
gpio_set_value(gpio, );
mdelay(); // tps6116 shut down.
}
2. 置CTRL PIN为高,进入tes_win。tes_win遵循下面的时序要求,以进入EasyScale的1-wire模式。
static void tps6116_reset(unsigned int gpio){
gpio_set_value(gpio, );
mdelay(); // tps6116 shut down.
gpio_set_value(gpio, ); // reset, FB = 200mv. start EasyScale detection window.
usleep(); // tes_delay. min 100us
preempt_disable(); // avoid the possbile shutdown. let me do it over.
gpio_set_value(gpio, );
usleep(); // tes_det, min 260us
gpio_set_value(gpio, );
preempt_enable();
usleep(); // tes_win, min 1000us. 500 + 300 + 500 = 1300 > 1000
}
3. 发送字符1。
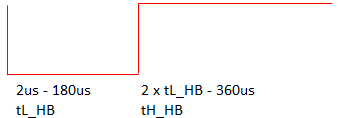
static void tps6116_send_bit_1(unsigned int gpio){
gpio_set_value(gpio, );
udelay(); // pull low for 20us
gpio_set_value(gpio,);
udelay(); // pull high for 80us
}
4. 发送字符0。
static void tps6116_send_bit_0(unsigned int gpio){
gpio_set_value(gpio, );
udelay(); // pull low for 80us
gpio_set_value(gpio,);
udelay(); // pull high for 20us
}
5. 发送字节。
static void tps6116_send_byte(unsigned int gpio, unsigned char value){
int i;
int bit;
udelay(); // start
for (i = ; i >= ; i--){
bit = value & ( << i); // High bit first
if (bit){
tps6116_send_bit_1(gpio);
}
else{
tps6116_send_bit_0(gpio);
}
}
gpio_set_value(gpio, ); // End of start
udelay();
gpio_set_value(gpio, ); // idle
}
6. 发送帧。
数据帧包含两个字节,第一个字节是地址0x72(固定的)。第二个地址是数据,bit[0-4]是FB寄存器值(0-31),bit[5-6]是设备地址(0),bit[7]是RFA,表示是否希望设备传回ACK。使用RFA,通信会更复杂,驱动还要改变GPIO方向,并且由于设备CTRL是OpenDrain的,主机端要加4.7K的上拉电阻。
// irq code running time is very short, assume it does not effect the timming here.
// if disable irq, the performance of the system will be effected.
static void tps6116_set_fb_value(unsigned int gpio, unsigned char value){
value = value & 0x1F; // RFA: 0, A1=A0=0
preempt_disable(); // let me do it over.
tps6116_send_byte(gpio, 0x72); // address: 0x72
tps6116_send_byte(gpio, value);
preempt_enable();
}
TPS6116x的Linux驱动的其它部分
1. 设置好平台驱动的数据结构。
static struct platform_driver tps6116_bl_driver = {
.driver = {
.name = "tps6116-bl",
.pm = &tps6116_bl_pm_ops,
.of_match_table = of_match_ptr(tps6116_bl_of_match),
},
.probe = tps6116_bl_probe,
.remove = tps6116_bl_remove,
.shutdown = tps6116_bl_shutdown,
};
module_platform_driver(tps6116_bl_driver);
2. probe的工作
1. 分配设备私有数据。
2. 从dts中获取必要的信息: default-brightness, max_brightness, gpio。
3. 初始化gpio。
4. 注册背光驱动。
5. 初始设置背光。
6. 设置平台驱动数据。 这样,从平台设备可以得到背光设备结构,从背光设备结构可以得到设备数据。这对应那些回调函数是很有必要的。
struct backlight_device *bl = platform_get_drvdata(pdev);
struct tps6116_bl *tps6116_bl = bl_get_data(bl);
最快的方法是找一个相似的背光驱动,比如pwm_bl.c,看它是怎么与驱动框架交互的。
后语
看Data sheet或者看别人写的示例代码,会忽略很多细节。而在整理资料的过程当中,为了把内容细致、逻辑地呈现出来,就会反复阅读和理解手头的资料,很多细节就被挖掘出来。所以养成资料整理的习惯是很有必要的。
TPS6116x 1-wire总线的分析与驱动实现的更多相关文章
- i2c总线,设备,驱动之间的关系
------ 总线上先添加好所有具体驱动,i2c.c遍历i2c_boardinfo链表,依次建立i2c_client, 并对每一个i2c_client与所有这个线上的驱动匹配,匹配上,就调用这个驱动的 ...
- 《Linux总线、设备与驱动》USB设备发现机制
说明:本分析基于mstar801平台Linux2.6.35.11内核,其他内核版本仅供参考. 一.程序在内核中的位置 1.usb host做为pci总线下的一个设备存在(嵌入式系统中有可能也会直接挂在 ...
- 利用FPGA实现PCI总线接口及Windows驱动实现
利用FPGA实现PCI总线接口及Windows驱动实现 关于PCI总线协议,资料网上.书本都是.这里我们仅仅对重点对利用FPGA实现PCI总线接口问题进行简单分析.下图是PCI总线接口信号: 配置空间 ...
- 从需求的角度去理解Linux系列:总线、设备和驱动
笔者成为博客专家后整理以前原创的嵌入式Linux系列博文,现推出以让更多的读者受益. <从需求的角度去理解linux系列:总线.设备和驱动>是一篇有关如何学习嵌入式Linux系统的方法论文 ...
- 迅为4412开发板Linux驱动教程——总线_设备_驱动注册流程详解
本文转自:http://www.topeetboard.com 视频下载地址: 驱动注册:http://pan.baidu.com/s/1i34HcDB 设备注册:http://pan.baidu.c ...
- linux设备驱动归纳总结(九):1.platform总线的设备和驱动【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-111745.html linux设备驱动归纳总结(九):1.platform总线的设备和驱动 xxxx ...
- linux设备驱动归纳总结(八):2.总线、设备和驱动的关系【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-110295.html linux设备驱动归纳总结(八):2.总线.设备和驱动的关系 xxxxxxxxx ...
- linux设备驱动归纳总结(八):1.总线、设备和驱动【转】
本文转载自:http://blog.chinaunix.net/uid-25014876-id-109733.html linux设备驱动归纳总结(八):1.总线.设备和驱动 xxxxxxxxxxxx ...
- Linux 总线、设备、驱动模型 与 设备树
1.总线.设备.驱动模型 本着高内聚.低耦合的原则,Linux 把设备驱动模型分为了总线.设备和驱动三个实体,这三个实体在内核里的职责分别如下: 设备和驱动向总线进行注册,总线负责把设备和对应的驱动绑 ...
随机推荐
- C++ 变长模板参数
转载自: http://www.cnblogs.com/liyiwen/archive/2013/04/13/3018608.html C++11 语言核心的改进中,最为关注的有 rvalue ref ...
- Error while Installing APKs
这一篇帖子 会写的比较简单 不过相信大家也可能遇到这些问题 为了怕自己忘记 记录下来 顺便也和大家一起分享 描述:在一些机型上安装软件 提示卸载原先的软件 但是又安装不上新软件DELETE_ ...
- java接口自动化基础知识(二)
二.HttpClient+testNG实现对接口的测试及校验 在上面第一篇中已经实现了基础配置和测试用例数据准备,本篇文章将以登录举例进行测试执行. 这是之前login接口的代码 @Test(grou ...
- unity读取txt,并且生成vector3的数组
读取txt的脚本: public void ReadFileTX(){ var str = File.ReadAllText(Application.streamingAssetsPath + &qu ...
- linux服务安装与配置(二):安装xinetd服务
linux服务安装与配置(二):安装xinetd服务 xinetd即extended internet daemon,xinetd是新一代的网络守护进程服务程序,又叫超级Internet服务器.经常用 ...
- spring-boot-starter-thymeleaf 避坑指南
第一步:pom配置环境 先不要管包是做什么的 总之必须要有 否则进坑 <!--避坑包--> <dependency> <groupId>net.sourceforg ...
- neo4j 学习笔记
1.参考 https://blog.csdn.net/appleyk/article/category/7408344 系列文章 (不支持 spring boo 2.0 以下的,入门可做参考) 2.底 ...
- kvm虚拟化1
计算机的五大组成部分: 运算器,控制器,存储器,输入,输出 虚拟化是对cpu ,内存,,磁盘, 网络,IO 的虚拟 cpu的虚拟 以时间分片形式进行,这样使得cpu可以运行多个进程 内存进行了空间 ...
- Java设计模式之建造者模式(生成器模式)
建造者模式: 也叫生成器模式.用来隐藏复合对象的创建过程,他把复合对象的创建过程加以抽象,通过子类继承和重载的方式,动态地创建具有复合属性的对象. 总结一句就是封装一个对象的构造过程,并允许按步骤构造 ...
- 99%的Linux运维工程师必须要掌握的命令及运用
本为同步于微信公众号[IT行业技术圈]关注即可查看更多相关知识点~ Linux对于程序员来并不陌生,随着图形化界面的深入人心,渐渐地命令行开始淡出了我们的视野,随着时间的推移也变得生疏且陌生起来.在此 ...