目标检测 | Point Cloud RoI Pooling
目标检测 | Point Cloud RoI Pooling
Point Cloud RoI Pooling 概述
Points Cloud RoI Pooling(点云RoI池化)是3d点云目标检测中一个相对重要的机制,RoI Pooling Layer是two-stage detector(二阶段检测网络)中最为核心的模块之一,使其与one-stage detector(一阶段检测网络)区别。据调研,其最早出自于Shaoshuai Shi等人的文章PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud,在文章中被称为Point cloud region pooling(点云区域池化)。
Point Cloud RoI Pooling机制顾名思义,是为了处理点云而在RoI Pooling基础上进行改进得到的,与RoI Pooling的目的和原理基本一致。
Pooling
首先,我们先从深度学习中,最基础且最熟悉不过的Pooling说起。Pooling最早是使用在LeNet,其用于减少特征图的尺寸并提取最显著的特征,从而降低模型复杂性并减少计算量,有助于防止过拟合,相对于是一个对特征subsampling的过程。
一般常用的有Max Pooling和Average Pooling,在某些做global descriptor的网络中还会使用Global Pooling
- Max Pooling(最大池化):对每个池化窗口内的特征取最大值作为该区域的代表特征。
- Average Pooling(平均池化):对每个池化窗口内的特征取平均值作为该区域的代表特征。
- Global Pooling(全局池化):将整个特征图进行池化,通常是全局平均池化或全局最大池化,将整个特征图降为一个单一的值或向量。
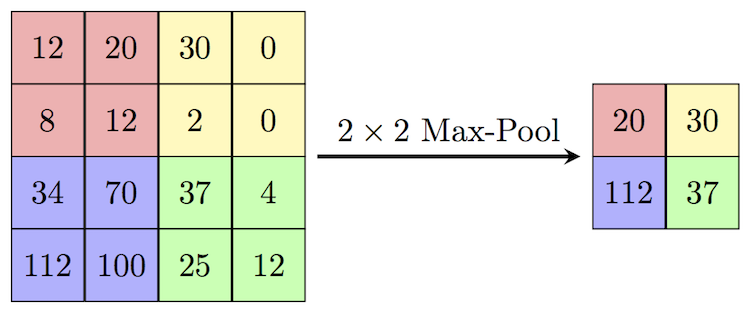
就以Max Pooling为例,其实现是通过滑动固定大小的\(N\times N\)窗口(图中是\(2\times 2\))在特征图上移动,对每个窗口内的特征进行汇总或提取,产生一个新的特征图。这个过程可以减小特征图的尺寸,保留最重要的特征信息,并减少参数数量和计算量。
此外如果是Average Pooling,还可以看作是卷积核为\(N\times N\)的全\(1\)矩阵,\(\text{stride}=N\)的卷积操作。
RoI Pooling
RoI Pooling最早出现Ross Girshick等人的文章Fast R-CNN。这篇文章提出了一种称为Fast R-CNN的目标检测方法,其中RoI Pooling被用于从卷积特征图中提取固定大小的特征表示,以用于后续的分类和边界框回归任务。
RoI Pooling机制的引入,使得网络可以将不同尺寸的RoI映射到固定大小的特征图上,这样就可以通过一个固定维度的全连接层处理所有的RoI了。
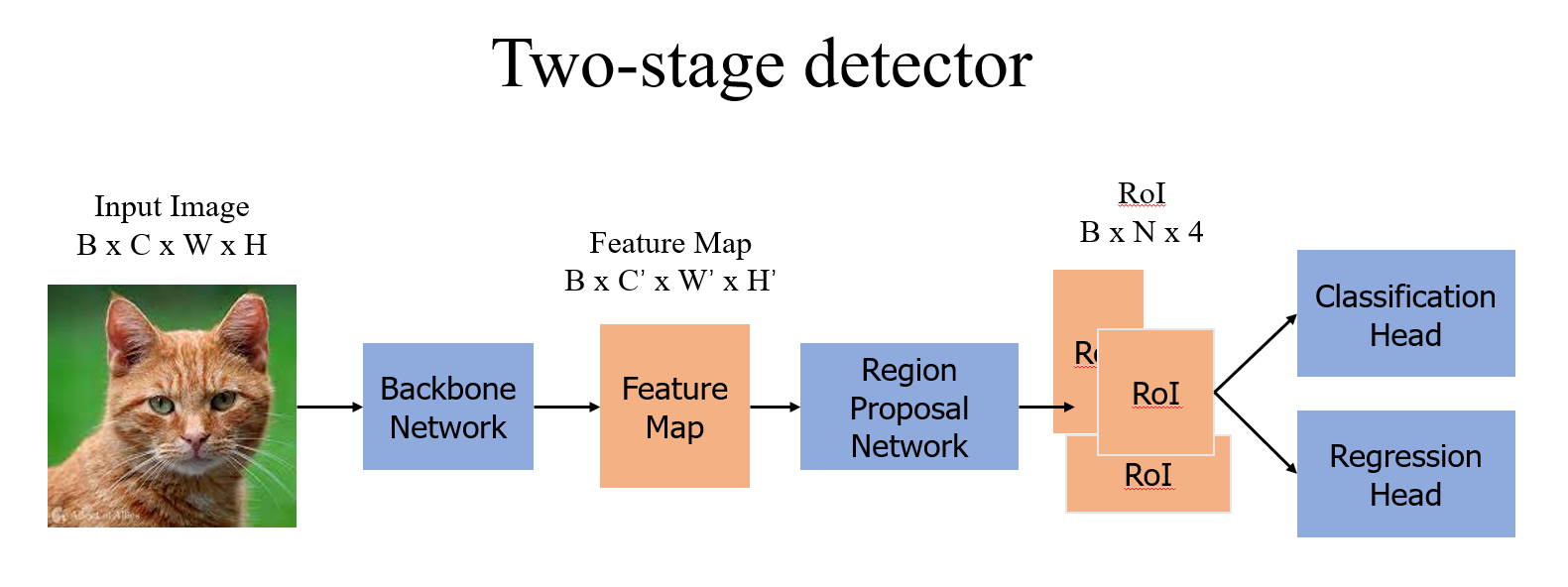
我们首先回顾一下two-stage detector的结构,如下图所示,其一共可以被分为三个部分:
Backbone Network (骨干网络)
Backbone Network负责从原始输入图像中提取特征。通常是一系列的卷积层、池化层和其他操作的堆叠,用于捕获图像的低级到高级特征。
其输出一般为比原始图像要小且通道数更高的\(B\times C^\prime\times W^\prime\times H^\prime\)矩阵
Region Proposal Network(RPN,区域建议网络)
RPN 是用于提出RoI(Region of Interest,感兴趣区域)的神经网络组件。它在骨干网络的基础上,通过滑动窗口或锚框技术,生成可能包含物体的RoI。
其输出一般为\(B\times N \times 4\)的矩阵,每一个RoI由\((x,y,w,h)\)的四维向量所表示,\((x,y)\)表示该RoI的中心点坐标,\((w,h)\)表示该RoI的长与宽,共有\(N\)个。
Classification Head(分类头)与Regression Head(回归头)
Classification Head用于对候选框内的目标物体进行分类,而Regression Head用于对候选框进行细化。Classification Head和Regression Head一般都是由固定大小的全连接层组成,通过RoI提取特征之后输入其中得到最终的目标检测结果。
如果我们关注RPN与Classification Head之间的连接,我们就会发现一个问题:得到的每一张RoI区域形状不一(长与宽不是固定的),那么其中包含的feature也将不是固定维度的,无法输入固定大小的Classification Head进行处理。
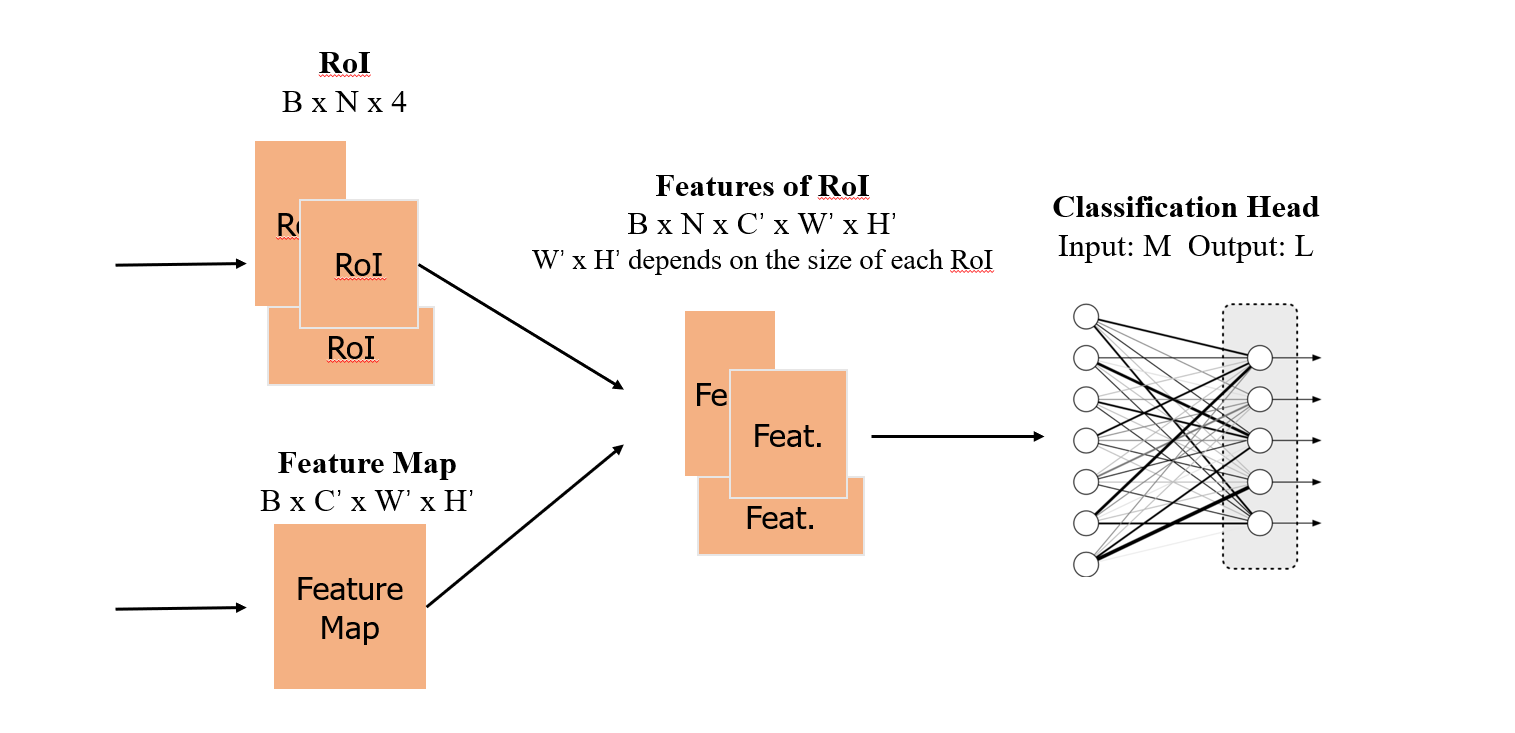
为此,我们需要通过一种机制将所有不同的\(W^\prime\times H^\prime\)的特征图处理为固定长度为\(M\)的特征,这就是RoI Pooling机制在发挥的作用了。
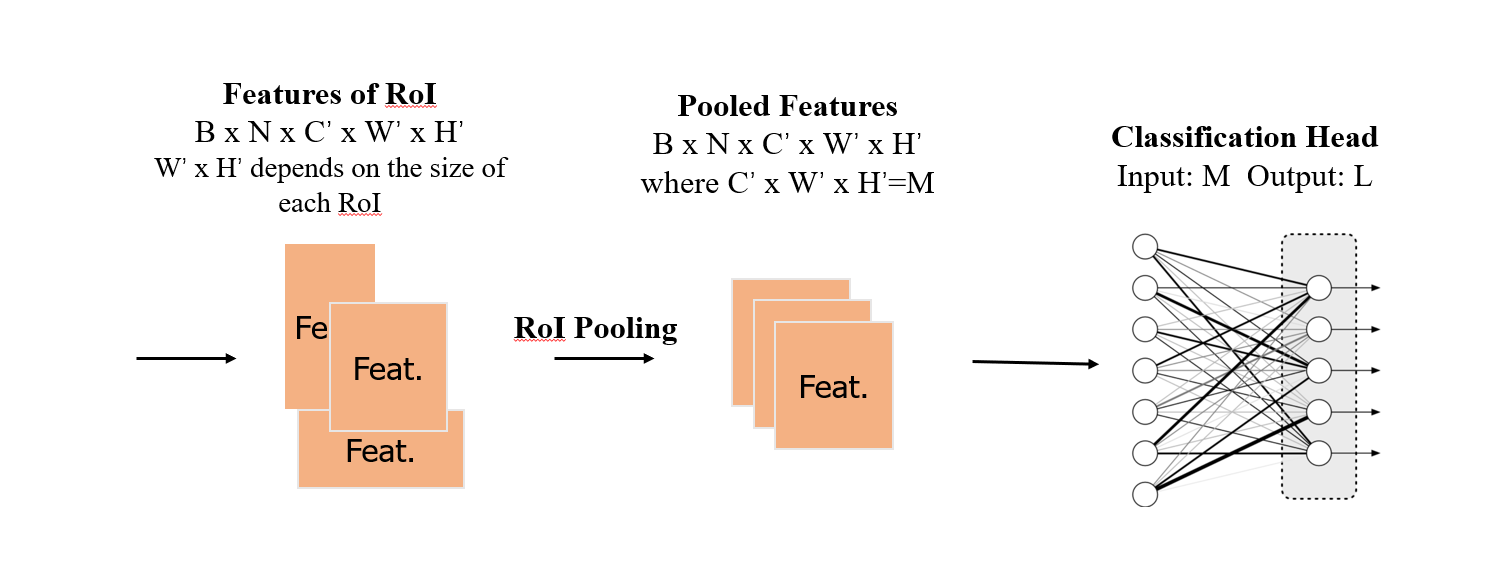
RoI Pooling任意的大小为\(C\times W^\prime \times H^\prime\)的RoI特征映射为固定大小为\(M=C\times W^{\prime\prime} \times H^{\prime\prime}\)的RoI特征,其中RoI Pooling可以被分为三步。
- 对齐RoI区域
- 划分RoI区域
- 池化RoI区域
下图简单地描述了RoI Max-pooling中的三个步骤

此外,还有一种称为RoI Align的机制是在RoI Pooling的基础上通过爽线性插值进行池化,因为与本随笔主题关系不大就不在此赘述了。
Point Cloud RoI Pooling
Point Cloud RoI Pooling顾名思义,是点云3d目标检测版本的RoI Pooling,据调研,最早见于Shaoshuai Shi等人的文章PointRCNN: 3D Object Proposal Generation and Detection from Point Cloud,在文章中被称为Point cloud region pooling(点云区域池化)。
点云的RoI Pooling相比于RGB图像的RoI Pooling发生了如下的改变:
- RoI和目标框由2d变为3d,这就意味着其参数由四维的\((x,y,w,h)\)上升为七维的\((x,y,z,l,w,h,\theta)\),其中\(\theta\)是目标框的yaw(偏航角)。虽然是3d目标检测,但是一般来说很少会有超过两个自由度的任务,所以使用一个七个参数就足以表示了。
- RGB图像是有序的点阵图,可以直接通过坐标查询,而点云的结构化程度低,无法直接通过坐标查询。其中点云是通过大小为\(B\times N\times(3+C)\)的矩阵进行表示,\(N\)是点云数量,\(3+C\)表示每个点云的特征(\(x,y,z\)坐标以及提取特征)。
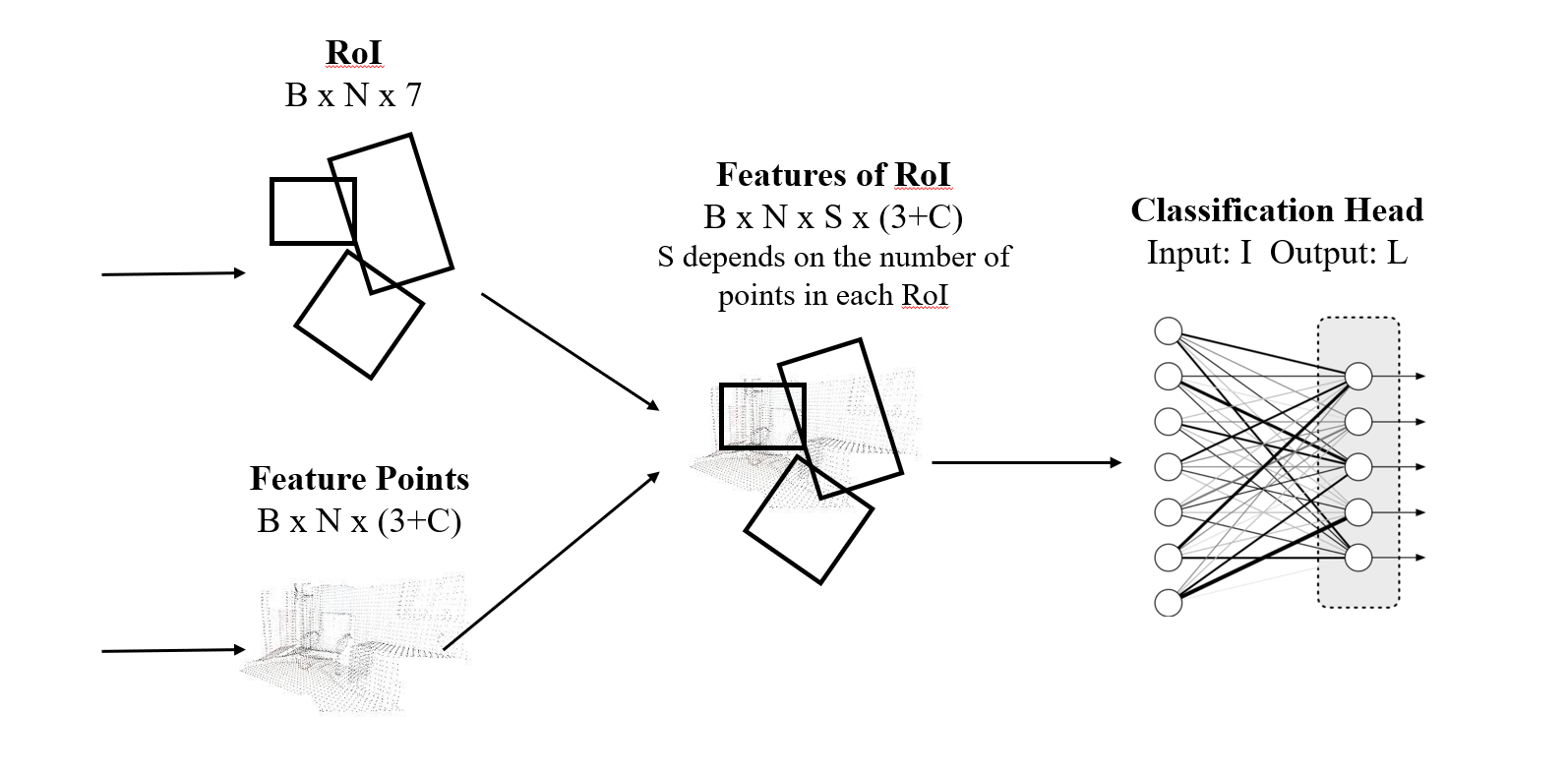
同样的,给定采样数量\(S^\prime\),Point Cloud RoI Pooling也可以被划分为以下几个步骤:
- pts assign,计算出每个点所属的RoI区域,输出大小为\(B\times M \times N\)的布尔矩阵pts assign,如果第\(B\)个batch中第\(M\)个点处于第\(N\)个RoI,那么\([B][M][N]=\textbf{true}\),反之\([B][M][N]=\textbf{false}\)。
- pts pool,通过第一步得到的布尔矩阵pts assign,计算出每个RoI区域中所拥有的点,并通过随机采样的方式将点的数量由\(S\)对齐为固定大小的\(S^\prime\),输出大小为\(B\times M \times S^\prime\)的index矩阵pts pool,其中每个元素都是点在点云中的index。
- feature forward,,将从第二步得到的大小为\(B\times M \times S^\prime\)的index矩阵pts pool映射成大小为\(B\times M \times S^\prime \times (3+C)\)的pooled feature(池化特征)
最后我们所得到固定大小为\(B\times M \times S^\prime \times (3+C)\)的池化特征,输入到分类头中,其输入大小为\(I=S^\prime \times (3+C)\),这样就完成了Point cloud pooling的操作。
Point Cloud RoI Pooling 实现细节
(未完待续)
目标检测 | Point Cloud RoI Pooling的更多相关文章
- CVPR2020论文解读:3D Object Detection三维目标检测
CVPR2020论文解读:3D Object Detection三维目标检测 PV-RCNN:Point-Voxel Feature Se tAbstraction for 3D Object Det ...
- ROI pooling
R-CNN需要大量的候选框,对每个候选框都提取特征,速度很慢,无法做到实时检测,无法做到端到端.ROI pooling层实现training和testing的显著加速,并提高检测accuracy. R ...
- 目标检测(二)SSPnet--Spatial Pyramid Pooling in Deep Convolutional Networks for Visual Recognotion
作者:Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun 以前的CNNs都要求输入图像尺寸固定,这种硬性要求也许会降低识别任意尺寸图像的准确度. ...
- 目标检测--Spatial pyramid pooling in deep convolutional networks for visual recognition(PAMI, 2015)
Spatial pyramid pooling in deep convolutional networks for visual recognition 作者: Kaiming He, Xiangy ...
- 目标检测中的pooling操作
1.SPPnet池化过程 假设这个feature map的尺寸是M*N*256,将这个feature map的每一个channel以4*4,2*2和1*1来划分格子,每个格子里面做max poolin ...
- 目标检测中roi的有关操作
1.roi pooling 将从rpn中得到的不同Proposal大小变为fixed_length output, 也就是将roi区域的卷积特征拆分成为H*W个网格,对每个网格进行maxpooling ...
- 定位、识别;目标检测,FasterRCNN
定位: 针对分类利用softmax损失函数,针对定位利用L2损失函数(或L1.回归损失等) 人关节点检测 针对连续变量和离散变量需要采用不同种类的损失函数. 识别: 解决方案: 1.利用滑动窗口,框的 ...
- 目标检测方法总结(R-CNN系列)
目标检测方法系列--R-CNN, SPP, Fast R-CNN, Faster R-CNN, YOLO, SSD 目录 相关背景 从传统方法到R-CNN 从R-CNN到SPP Fast R-CNN ...
- 目标检测之R-CNN系列
Object Detection,在给定的图像中,找到目标图像的位置,并标注出来. 或者是,图像中有那些目标,目标的位置在那.这个目标,是限定在数据集中包含的目标种类,比如数据集中有两种目标:狗,猫. ...
- 利用更快的r-cnn深度学习进行目标检测
此示例演示如何使用名为“更快r-cnn(具有卷积神经网络的区域)”的深度学习技术来训练对象探测器. 概述 此示例演示如何训练用于检测车辆的更快r-cnn对象探测器.更快的r-nnn [1]是r-cnn ...
随机推荐
- 传统的MVC开发模式和前后端分离开发模式
1. 引言 在当今互联网时代,移动应用和网页应用的发展极大地推动了前后端分离开发模式的兴起.传统的后端渲染方式已经不能满足用户对高性能和优质用户体验的需求,于是前后端分离逐渐成为了一种主流的开发模式. ...
- 报错AttributeError: Attempted to set WANDB to False, but CfgNode is immutable
问题 今天在跑代码的时候,使用到了wandb记录训练数据. 我在23服务器上跑的好好的,但将环境迁移到80服务器上重新开始跑时,却遇到了如下报错 看这个报错信息是由于wandb没有apis这个属 ...
- FreeRTOS 中的调度算法
FreeRTOS 中的调度算法 01 调度算法概述 调度算法的作用: 实时系统的调度需求 相应时间要求 任务优先级 资源利用率 FreeRTOS 调度算法的目标 提供可预测的任务调度 实现任务的优先级 ...
- 爽。。。一键导出 MySQL 表结构,告别手动梳理表结构文档了。。。
背景 系统需要交付,客户要求提供交维材料,包括系统的表结构,安排开发人员进行梳理,效率比较慢,遂自己花点时间捣鼓一下,发现有此插件,记录一下方便与同事分享 前提条件 必须有 go语言环境,有的话直接看 ...
- the solution of Mining Your Own Business
the description of problem (我看的是 PDF 里面的原题所以这里描述会和题目不一样,但是大意一致) 给定一个未必连通的无向图,问最少在几个点设置出口,可以保证任意一个点坍塌 ...
- 文心一言 VS 讯飞星火 VS chatgpt (109)-- 算法导论10.1 7题
七.用go语言,说明如何用两个队列实现一个栈,并分析相关栈操作的运行时间. 文心一言: 在Go语言中,我们可以用两个队列(queue1和queue2)实现一个栈.以下是实现代码: package ma ...
- vue 基于原生动画的自动滚动表格
前言 公司展示大屏需要写滚动表格,通过滚动播放数据,自己随便摸了一个基于动画的自动滚动表格 原理 根据每行的大小和设置的每行滚动时间设置滚动位置,动态添加动画,并把数组第一项移动到最后一项,并订阅该动 ...
- [CISCN 2019华东南]Web11
看到下面connection 里面的内容有一点像抓包出来的 就抓包试试 似乎感觉也没有什么用 看到这个东西,那么就想到改IP 添加X-Forwarded-For:127.0.0.1 发现这个IP随着我 ...
- 手撕Vue-查找指令和模板
接着上一篇文章,我们已经实现了提取元素到内存的过程,接下来我们要实现的是查找指令和模板. 大致的思路是这样的: 遍历所有的节点 需要判断当前遍历到的节点是一个元素还是一个文本 如果是一个元素, 我们需 ...
- [glibc] 带着问题看源码 —— exit 如何调用 atexit 处理器
前言 之前在写 apue 系列的时候,曾经对系统接口的很多行为产生过好奇,当时就想研究下对应的源码,但是苦于 linux 源码过于庞杂,千头万绪不知从何开启,就一直拖了下来. 最近在查一个问题时无意间 ...