HOG算法基础
实现思路步骤:
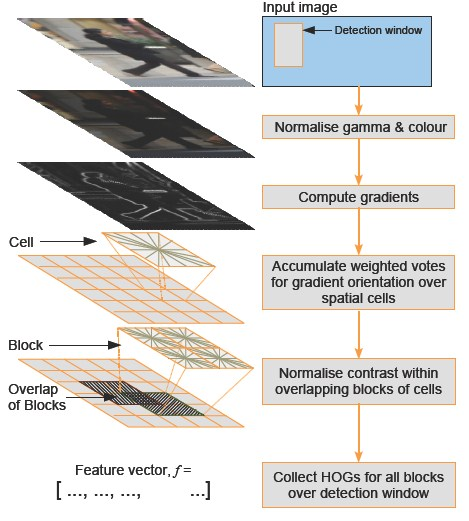
1.对原图像gamma校正,img=sqrt(img);
2.求图像竖直边缘,水平边缘,边缘强度,边缘斜率。
3.将图像每16*16(取其他也可以)个像素分到一个cell中。对于256*256的lena来说,就分成了16*16个cell了。
4.对于每个cell求其梯度方向直方图。通常取9(取其他也可以)个方向(特征),也就是每360/9=40度分到一个方向,方向大小按像素边缘强度加权。
5.每2*2(取其他也可以)个cell合成一个block,所以这里就有(16-1)*(16-1)=225个block。最后归一化直方图。
6.所以每个block中都有2*2*9个特征,一共有225个block,所以总的特征有225*36个。
当然一般HOG特征都不是对整幅图像取的,而是对图像中的一个滑动窗口取的。
形象化的用一个流程图显示:

matlab实现代码:参考别人的修改的
clear;clc;
img=imread('E:\mat\lena.jpg');%图片位置
%获取图像,尺寸,并将图像resize成step的最近整数倍
img=double(img);
figure;imshow(img,[]);%显示图像
step=; %step*step个像素作为一个cell
[m1 ,n1]=size(img);%获取图像尺寸
img=imresize(img,[floor(m1/step)*step,floor(n1/step)*step],'nearest');
[m,n]=size(img);
%伽马校正
img=sqrt(img);
figure; imshow(img,[]);%显示图像
%滤波,求梯度
fy=[- ]; %定义竖直模板
fx=fy'; %定义水平模板
Iy=imfilter(img,fy,'replicate'); %竖直边缘
Ix=imfilter(img,fx,'replicate'); %水平边缘
Ied=sqrt(Ix.^+Iy.^); %边缘强度 求梯度的长度
Iphase=Iy./Ix; %边缘斜率,有些为inf,-inf,nan,其中nan需要再处理一下
figure; imshow(Ied,[]); %显示梯度提取后的值
%求cell
orient=; %方向直方图的方向个数
angular=/orient; %每个方向包含的角度数,划分角度区间,0到40度一个区间...
Cell=cell(,); %所有的角度直方图,cell是可以动态增加的,先设了一个
%% 开始获取orient个方向的特征向量
ii=;
jj=;
for i=:step:m-step %如果处理的m/step不是整数,最好是i=:step:m-step
ii=;
for j=:step:n
tmpx=Ix(i:i+step-,j:j+step-); %水平
tmped=Ied(i:i+step-,j:j+step-); %边缘强度
tmped=tmped/sum(sum(tmped)); %% 局部边缘强度归一化
tmpphase=Iphase(i:i+step-,j:j+step-);%% 边缘斜率局部提取
Hist=zeros(,orient); %% 创建直方图
%当前step*step像素块统计角度直方图,就是cell %% 统计一个cell里面的梯度信息
for p=:step
for q=:step
%% 判断是不是一个数字True for Not-a-Number.如果不是一个数字,就归零
if isnan(tmpphase(p,q))== %因为会遇到0/0的情况
tmpphase(p,q)=;
end
%% 进行区间的划分
ang=atan(tmpphase(p,q)); %atan求的是[- ]度之间
ang=mod(ang*/pi,); %全部变正,-90变270
if tmpx(p,q)< %根据x方向确定真正的角度
if ang< %如果是第一象限
ang=ang+; %移到第三象限
end
if ang> %如果是第四象限
ang=ang-; %移到第二象限
end
end
ang=ang+0.0000001; %防止ang为0
Hist(ceil(ang/angular)) = Hist(ceil(ang/angular))+tmped(p,q); %ceil向上取整,使用边缘强度加权
end
end
%% 方向直方图归一化
Hist=Hist/sum(Hist);
Cell{ii,jj}=Hist; %放入Cell中
ii=ii+; %针对Cell的y坐标循环变量
end
jj=jj+; %针对Cell的x坐标循环变量
end %% 下面是求feature,*2个cell合成一个block,没有显式的求block
[m2, n2]=size(Cell);
feature=cell(,(m2-)*(n2-));
for i=:m2-
for j=:n2-
f=[];
f=[f Cell{i,j}(:)' Cell{i,j+1}(:)' Cell{i+,j}(:)' Cell{i+1,j+1}(:)'];
feature{(i-)*(n2-)+j}=f;
end
end
%以上就可以得到我们需要的所有的HOG特征了,以下部分主要是为了显示
l=length(feature);
f=[];
for i=:l
f=[f;feature{i}(:)'];
end
figure
mesh(f)
当然看文献发现我们还可以对得到的HOG特征进行PCA降维处理来提高计算速率的同时,降低噪声的影响。----有点矛盾吧,HOG我感觉实际上是采用不断划分cell和block的过程增加描述图像的特征,而PCA则是降低图像特征描述的维数。
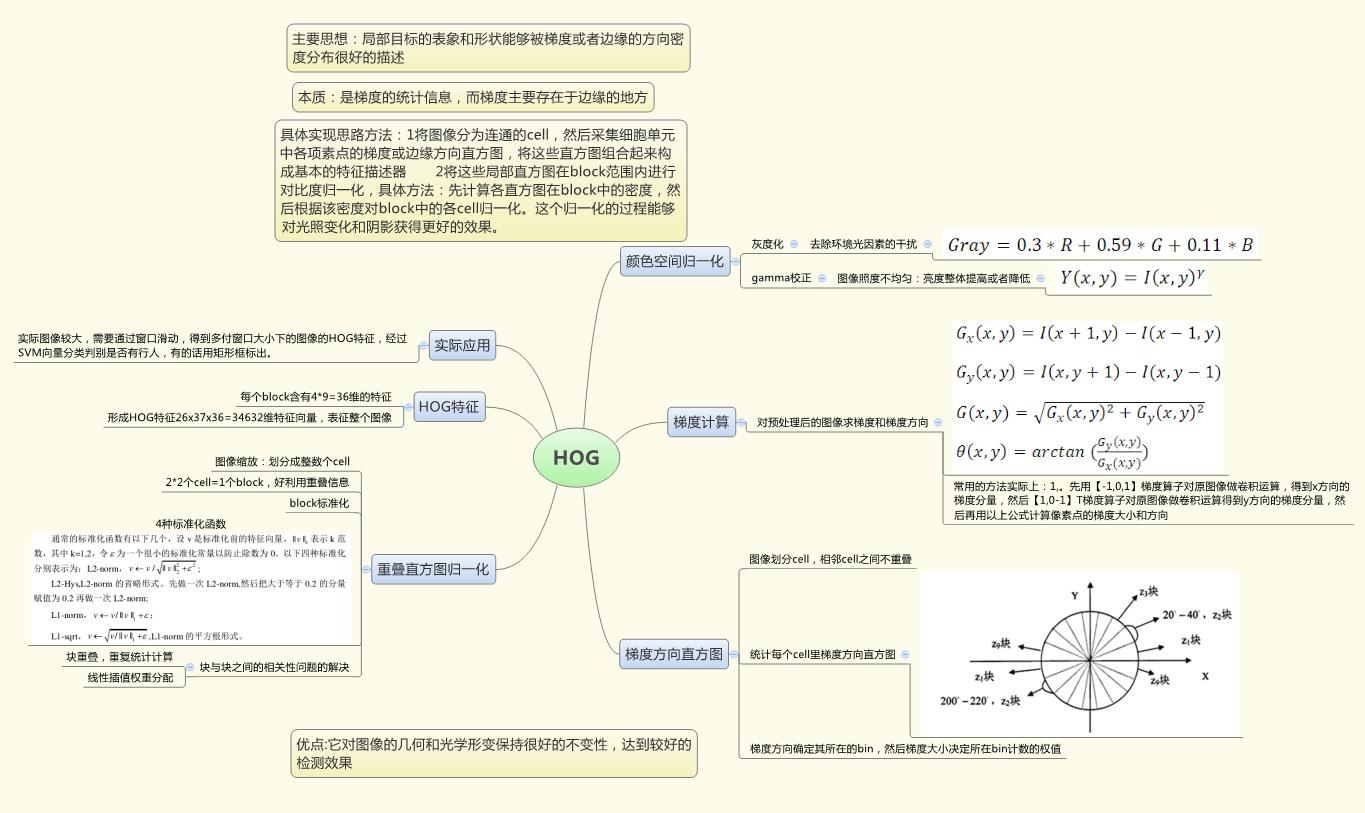
附一个基础整理的mind图:
亲测可用的程序
clear all; close all; clc;
%img=double(imread('lena.jpg'));
%img=imread('man.png');
img=imread('C:\Users\ding\Desktop\Test.jpg');
img=rgb2gray(img); %简单起见,彩图转灰度图。后续可以改进。
img=imresize(img, [ ]);
img=double(img);
[h, w, ~] = size(img);
%下面是求cell
cell_size=; %step*step个像素作为一个cell. cell_size=pixels_per_cell
orient=; %方向直方图包含的方向数
angle_range=/orient; %每个方向包含的角度数
h=round(h/cell_size)*cell_size;
w=round(w/cell_size)*cell_size;
img=img(:h,:w,:);
img = sqrt(img); %伽马校正。J=AI^r 此处取A=,r=0.5
% 下面是求边缘
fy=[- ]; %定义竖直模版
fx=fy'; %定义水平模版
Gy=imfilter(img, fy, 'replicate'); %竖直梯度
Gx=imfilter(img, fx, 'replicate'); %水平梯度
Gmag=sqrt(Gx.^+Gy.^); %梯度幅值
%为每个cell计算其decriptor(梯度方向直方图,即一个1*orient规格的向量)
cell_descriptors=zeros(orient, h/cell_size, w/cell_size);
idx_y=;
for y=:cell_size:h
idx_x=;
for x=:cell_size:w
tmpx=Gx(y:y+cell_size-, x:x+cell_size-);
tmpy=Gy(y:y+cell_size-, x:x+cell_size-);
tmped=Gmag(y:y+cell_size-,x:x+cell_size-);
tmped=tmped/sum(sum(tmped)); %每个cell的局部边缘强度归一化
cell_hist=zeros(, orient); %当前cell_size*cell_size像素统计角度直方图,就是cell
for p=:cell_size
for q=:cell_size
ang=atan2(tmpy(p,q), tmpx(p,q)); %atan2返回的是[-pi,pi]之间的弧度值
ang=mod(ang*/pi, ); %先转角度,再划归到[,)之间。因为mod的参数现在不是整数,因此会大于179.
ang=ang+0.0000001; %防止ang为0
bin_id = ceil(ang/angle_range);%得到的bin_id \in [,]
cell_hist(bin_id)=cell_hist(bin_id)+tmped(p,q); %ceil向上取整,使用边缘强度加权。此处根据梯度方向进行vote,权值为梯度幅值
end
end
cell_descriptors(:,idx_y,idx_x) = cell_hist;
idx_x = idx_x + ;
end
idx_y = idx_y + ;
end
%下面是计算feature,block_size*block_size个cell合成一个block
%比如block_size取2
[sw, h, w]=size(cell_descriptors);
block_size=; %cells_per_block=,即每个block_size=*=16像素
%d得到横竖方向数分别有几个block,用于计算总的特征数量
stride=;
h_max=floor((h-block_size)/stride)+;
w_max=floor((w-block_size)/stride)+;
block_descriptors=zeros(block_size*block_size*orient, h_max, w_max);
for i=:h_max
for j=:w_max
blk_mat=cell_descriptors(:,i:i+block_size-, j:j+block_size-);%得到每个block的特征值
%%L2范数归一化就是向量中每个元素除以向量的L2范数
for k=:
A=reshape(blk_mat(k,:,:),,);
normed_blk_mat(k)=norm(A,);
% blk_mat1=
end
normed_blk_mat1=norm(normed_blk_mat,);
normed_blk_mat2=blk_mat/normed_blk_mat1;
reshaped_blk_mat=reshape(normed_blk_mat2, [ block_size*block_size*orient]);
block_descriptors(:,i,j)=reshaped_blk_mat;
end
end
%将block_descriptors进行拼接,得到final_descriptor
[d1,d2,d3]=size(block_descriptors);
dimensions=d1*d2*d3;
final_descriptor=zeros(, dimensions);
k=;
for i=:d2
for j=:d3
final_descriptor(k:k+d1-)=block_descriptors(:,i,j);
k=k+d1;
end
end
HOG算法基础的更多相关文章
- Levenberg-Marquardt算法基础知识
Levenberg-Marquardt算法基础知识 (2013-01-07 16:56:17) 转载▼ 什么是最优化?Levenberg-Marquardt算法是最优化算法中的一种.最优化是寻找使 ...
- 解读Raft(一 算法基础)
最近工作中讨论到了Raft协议相关的一些问题,正好之前读过多次Raft协议的那paper,所以趁着讨论做一次总结整理. 我会将Raft协议拆成四个部分去总结: 算法基础 选举和日志复制 安全性 节点变 ...
- 腾讯2017年暑期实习生编程题【算法基础-字符移位】(C++,Python)
算法基础-字符移位 时间限制:1秒 空间限制:32768K 题目: 小Q最近遇到了一个难题:把一个字符串的大写字母放到字符串的后面,各个字符的相对位置不变,且不能申请额外的空间. 你能帮帮小Q吗? ...
- 算法基础_递归_求杨辉三角第m行第n个数字
问题描述: 算法基础_递归_求杨辉三角第m行第n个数字(m,n都从0开始) 解题源代码(这里打印出的是杨辉三角某一层的所有数字,没用大数,所以有上限,这里只写基本逻辑,要符合题意的话,把循环去掉就好) ...
- 毕业设计预习:SM3密码杂凑算法基础学习
SM3密码杂凑算法基础学习 术语与定义 1 比特串bit string 由0和1组成的二进制数字序列. 2 大端big-endian 数据在内存中的一种表示格式,规定左边为高有效位,右边为低有效位.数 ...
- Python之算法基础
1>递归相关: 递归:递归算法是一种直接或间接地调用自身算法的过程,在计算机编写程序中,递归算法对解决一大类问题是十分有效的,它往往使算法的描述简洁而且 易于 ...
- Python 迭代器&生成器,装饰器,递归,算法基础:二分查找、二维数组转换,正则表达式,作业:计算器开发
本节大纲 迭代器&生成器 装饰器 基本装饰器 多参数装饰器 递归 算法基础:二分查找.二维数组转换 正则表达式 常用模块学习 作业:计算器开发 实现加减乘除及拓号优先级解析 用户输入 1 - ...
- 算法基础:BFS和DFS的直观解释
算法基础:BFS和DFS的直观解释 https://cuijiahua.com/blog/2018/01/alogrithm_10.html 一.前言 我们首次接触 BFS 和 DFS 时,应该是在数 ...
- 2020牛客寒假算法基础集训营2 J题可以回顾回顾
2020牛客寒假算法基础集训营2 A.做游戏 这是个签到题. #include <cstdio> #include <cstdlib> #include <cstring ...
随机推荐
- C#——反射,自动生成添加的SQL语句
C#中的反射.是C#中特别重要也是特别神奇的特性,对后面学习框架,了解框架的原理.以及自己写框架,都是必不可少的.学习反射的过程中.总给我一种茅塞顿开的感觉,以前不懂的,现在懂了 反射的介绍:http ...
- 关于wireshark的使用
1.简介 Wireshark(前称Ethereal)是一个网络封包分析软件.网络封包分析软件的功能是撷取网络封包,并尽可能显示出最为详细的网络封包资料.Wireshark使用WinPCAP作为接口,直 ...
- 《C++语言导学》小记
我看的这本是Bjarne Stroustrup写的,南开大学的杨巨峰和王刚译的.这本书不适合初学者看,我就是大概翻了翻其中感兴趣的章节. 这本书第14章的标题是“历史和兼容性”,这节内容我看了收获很深 ...
- ASP.NET ZERO 学习 导航菜单
定义PageNames和PermissionName PageNames : Web/App_Start/Navigation/PageNames.cs public const string Das ...
- 物体检测中常用的几个概念迁移学习、IOU、NMS理解
1.迁移学习 迁移学习也即所谓的有监督预训练(Supervised pre-training),我们通常把它称之为迁移学习.比如你已经有一大堆标注好的人脸年龄分类的图片数据,训练了一个CNN,用于人脸 ...
- UVA 10158 并查集的经典应用
这个题目一看就是用并查集,有N个国家代表,在M行给出两两之间的关系,敌人或者朋友,(当然如果该关系跟已知关系冲突,则输出-1) 关系的几个约束条件时这样的 在朋友方面,朋友的朋友就是自己的朋友,这个就 ...
- LeetCode——560. 和为K的子数组
给定一个整数数组和一个整数 k,你需要找到该数组中和为 k 的连续的子数组的个数. 示例 1 : 输入:nums = [1,1,1], k = 2 输出: 2 , [1,1] 与 [1,1] 为两种不 ...
- leetcode中二分查找的具体应用
给定一个按照升序排列的整数数组 nums,和一个目标值 target.找出给定目标值在数组中的开始位置和结束位置. 你的算法时间复杂度必须是 O(log n) 级别. 如果数组中不存在目标值,返回 [ ...
- layui select恢复默认值
- Kali 安装 Google 中文输入法
前言 安装了 Linux 并设置中文后,为了操作起来更便捷准备安装一个中文输入法 之前安装搜狗输入法,由于搜狗输入法基于 qt4,估计短期是 GG 了 所以这次选择了 Google 输入法 以下是安装 ...