ROS tf-深入Time和TF
博客转载自:https://www.ncnynl.com/archives/201702/1313.html
ROS与C++入门教程-tf-深入Time和TF
说明:
- 介绍使用waitForTransform函数去等待TF树中的变换生效
TF和Time
- 在前面的教程中,我们了解了tf如何跟踪坐标系树。
- 此树随时间变化,tf存储每个变换的时间快照(默认情况下最多为10秒)。
- 直到现在,我们使用lookupTransform()函数来获取该tf树中最新的可用变换,而不知道什么时候记录变换。
- 本教程将教您如何在特定时间获取转换。
- 在上个教程的文件上修改:
$ roscd learning_tf
$ vim src/turtle_tf_listener.cpp
- 找到代码:
try{
listener.lookupTransform("/turtle2", "/carrot1",
ros::Time(0), transform);
- 修改为:
try{
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time(0), transform);
- 更改/turtle2跟随/turtle1,不是/carrot1,我们指定了时间为0,即获得最新有效的变换。
- 改变获取当前时间的变换,即改为now(), 修改代码:
try{
listener.lookupTransform("/turtle2", "/turtle1",
ros::Time::now(), transform);
- 编译运行:
$ catkin_make
$ roslaunch learning_tf start_demo.launch
- lookupTransform()函数提示失败:
[ERROR] [1287871653.885277559]: You requested a transform that is 0.018 miliseconds in the past, but the most recent transform in the tf buffer is 7.681 miliseconds old.
When trying to transform between /turtle1 and /turtle2.
- 这是为什么? 每个监听器有一个缓冲区,它存储来自不同tf广播者的所有坐标变换。 当广播者发出变换时,变换进入缓冲区之前需要一些时间(通常是几个毫秒)。 因此,当您在时间“now”请求坐标系变换时,您应该等待几毫秒以获得该信息。
等待变换
- tf提供了一个很好的工具,它将等待,直到变换可用。
- 修改代码为:
try{
ros::Time now = ros::Time::now();
listener.waitForTransform("/turtle2", "/turtle1",
now, ros::Duration(3.0));
listener.lookupTransform("/turtle2", "/turtle1",
now, transform);
waitForTransform() 四个参数:
- 1.需要等待变换从坐标系turtle2
- 2.到坐标系turtle1
- 3.在now时间
- 4.超时时间,不要等待超过此最大持续时间
注意:使用ros::Time::now()是为了这个例子。通常这将是希望被转换的数据的时间戳。
所以waitForTransform()实际上会阻塞直到两个海龟之间的变换可用(这通常需要几毫秒)
或者如果变换不可用,直到达到超时。
编译运行:
$ catkin_make
$ roslaunch learning_tf start_demo.launch
- 但等待,您可能仍会看到错误一次(错误msg可能会有所不同):
[ERROR] [1287872014.408401177]: You requested a transform that is 3.009 seconds in the past, but the tf buffer only has a history of 2.688 seconds.
When trying to transform between /turtle1 and /turtle2.
这是因为turtle2需要非零时间来生成并开始发布tf帧。 因此,第一次请求现在时间的/turtle2坐标系可能不存在,当请求转换时,转换可能不存在,并且第一次失败。 在第一次变换之后,所有的变换都存在,
并且乌龟的行为如预期的那样。
检查结果
- 现在,你应该能够使用箭头键(确保你的终端窗口是活跃的,而不是你的模拟器窗口),你会看到第二只乌龟跟随第一只乌龟!
- 所以,你注意到乌龟的行为没有明显的区别。 这是因为实际的时间差只有几个毫秒。 但是为什么我们从Time(0)到now()进行这种改变? 只是教你关于tf缓冲区和与它相关的时间延迟。对于真实的tf用例,使用Time(0)通常是完全正常的。
ROS与C++入门教程-tf-Time travel(时间穿梭
说明:
- 介绍tf的高级时间穿梭功能
Time travel
- 利用上一个教程的文件。
- 打开src/turtle_tf_listener.cpp,找到25-30,如下:
try{
ros::Time now = ros::Time::now();
listener.waitForTransform("/turtle2", "/turtle1",
now, ros::Duration(1.0));
listener.lookupTransform("/turtle2", "/turtle1",
now, transform);
- 现在,不是让turtle2去到turtle1当前时间的地方,而让turtle2去turtle1是5秒前的地方:
try{
ros::Time past = ros::Time::now() - ros::Duration(5.0);
listener.waitForTransform("/turtle2", "/turtle1",
past, ros::Duration(1.0));
listener.lookupTransform("/turtle2", "/turtle1",
past, transform);
- 编译运行:
$ make or catkin_make
$ roslaunch learning_tf start_demo.launch
你会期望看到什么? 在第一个5秒钟,第二只乌龟不知道去哪里,因为我们还没有第一只乌龟5秒的历史。
但是这5秒后呢?效果图:

类似截图,你的海龟是不可控制? 那么发生了什么?
我们问TF:相对于/turtle2 5秒前,/turtle1 5秒前的姿势是什么?
这意味着我们控制/turtle2基于5秒前的位置以及/turtle1在5秒前的位置。
那应该问:相对于/turtle2目前的位置,/turtle1 5秒前的姿势是什么?
高级API
- 回答上面问题,依赖高级API,示例代码:
try{
ros::Time now = ros::Time::now();
ros::Time past = now - ros::Duration(5.0);
listener.waitForTransform("/turtle2", now,
"/turtle1", past,
"/world", ros::Duration(1.0));
listener.lookupTransform("/turtle2", now,
"/turtle1", past,
"/world", transform);
这个lookupTransform()API,有六个参数:
- 变换从坐标系turtle2
- 在now时间
- 到turtle1坐标系
- 在past时间
- 指定不随时间改变的坐标系,这里是world
- 变换结果保存的变量
waitForTransform()跟lookupTransform()一样有6个相应参数。
效果图示:
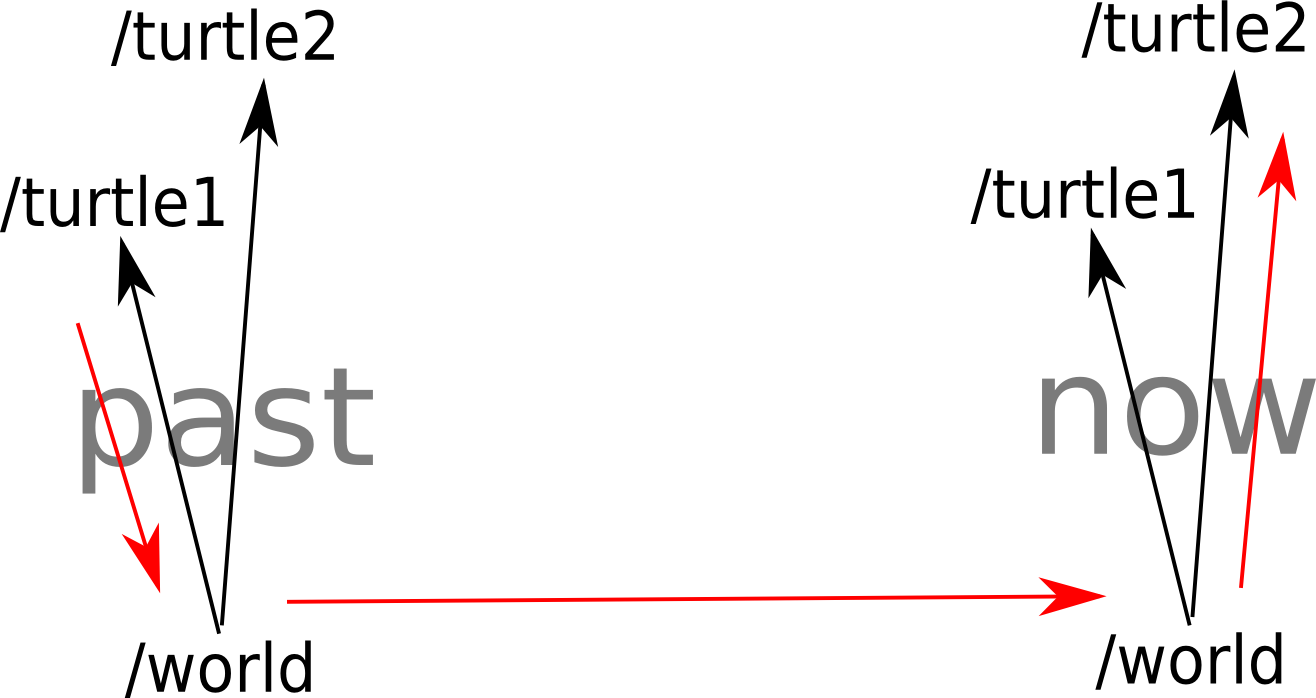
这个图显示了tf在后台做什么。
在past时间,它计算从turtle1到world坐标系的变换。
在world坐标系,tf时间从past到now。
在now时间,tf计算从world到turtle2坐标系的变换。
检查结果:
- 编译运行:
$ catkin_make
$ roslaunch learning_tf start_demo.launch
- 效果:turtle2是指向turtle1 5秒前的地方!
ROS tf-深入Time和TF的更多相关文章
- tf.nn.conv2d 和 tf.nn.max_pool 中 padding 分别为 'VALID' 和 'SAME' 的直觉上的经验和测试代码
这个地方一开始是迷糊的,写代码做比较分析,总结出直觉上的经验. 某人若想看精准的解释,移步这个网址(http://blog.csdn.net/fireflychh/article/details/73 ...
- 深度学习原理与框架-图像补全(原理与代码) 1.tf.nn.moments(求平均值和标准差) 2.tf.control_dependencies(先执行内部操作) 3.tf.cond(判别执行前或后函数) 4.tf.nn.atrous_conv2d 5.tf.nn.conv2d_transpose(反卷积) 7.tf.train.get_checkpoint_state(判断sess是否存在
1. tf.nn.moments(x, axes=[0, 1, 2]) # 对前三个维度求平均值和标准差,结果为最后一个维度,即对每个feature_map求平均值和标准差 参数说明:x为输入的fe ...
- TF之RNN:TF的RNN中的常用的两种定义scope的方式get_variable和Variable—Jason niu
# tensorflow中的两种定义scope(命名变量)的方式tf.get_variable和tf.Variable.Tensorflow当中有两种途径生成变量 variable import te ...
- 深度学习原理与框架-Tensorflow基本操作-变量常用操作 1.tf.random_normal(生成正态分布随机数) 2.tf.random_shuffle(进行洗牌操作) 3. tf.assign(赋值操作) 4.tf.convert_to_tensor(转换为tensor类型) 5.tf.add(相加操作) tf.divide(相乘操作) 6.tf.placeholder(输入数据占位
1. 使用tf.random_normal([2, 3], mean=-1, stddev=4) 创建一个正态分布的随机数 参数说明:[2, 3]表示随机数的维度,mean表示平均值,stddev表示 ...
- tensorflow中 tf.train.slice_input_producer 和 tf.train.batch 函数(转)
tensorflow数据读取机制 tensorflow中为了充分利用GPU,减少GPU等待数据的空闲时间,使用了两个线程分别执行数据读入和数据计算. 具体来说就是使用一个线程源源不断的将硬盘中的图片数 ...
- TensorFlow 辨异 —— tf.add(a, b) 与 a+b(tf.assign 与 =)、tf.nn.bias_add 与 tf.add(转)
1. tf.add(a, b) 与 a+b 在神经网络前向传播的过程中,经常可见如下两种形式的代码: tf.add(tf.matmul(x, w), b) tf.matmul(x, w) + b 简而 ...
- tensorflow中共享变量 tf.get_variable 和命名空间 tf.variable_scope
tensorflow中有很多需要变量共享的场合,比如在多个GPU上训练网络时网络参数和训练数据就需要共享. tf通过 tf.get_variable() 可以建立或者获取一个共享的变量. tf.get ...
- tensorflow中 tf.train.slice_input_producer 和 tf.train.batch 函数
tensorflow数据读取机制 tensorflow中为了充分利用GPU,减少GPU等待数据的空闲时间,使用了两个线程分别执行数据读入和数据计算. 具体来说就是使用一个线程源源不断的将硬盘中的图片数 ...
- tensorflow 基本函数(1.tf.split, 2.tf.concat,3.tf.squeeze, 4.tf.less_equal, 5.tf.where, 6.tf.gather, 7.tf.cast, 8.tf.expand_dims, 9.tf.argmax, 10.tf.reshape, 11.tf.stack, 12tf.less, 13.tf.boolean_mask
1. tf.split(3, group, input) # 拆分函数 3 表示的是在第三个维度上, group表示拆分的次数, input 表示输入的值 import tensorflow ...
- 关于 tf.nn.softmax_cross_entropy_with_logits 及 tf.clip_by_value
In order to train our model, we need to define what it means for the model to be good. Well, actuall ...
随机推荐
- golang中逗号ok模式_转
,ok,第一个参数是一个值或者nil,第二个参数是true/false或者一个错误error.在一个需要赋值的if条件语句中,使用这种模式去检测第二个参数值会让代码显得优雅简洁.这种模式在go语言编码 ...
- 【转】高性能网络编程6--reactor反应堆与定时器管理
反应堆开发模型被绝大多数高性能服务器所选择,上一篇所介绍的IO多路复用是它的实现基础.定时触发功能通常是服务器必备组件,反应堆模型往往还不得不将定时器的管理囊括在内.本篇将介绍反应堆模型的特点和用法. ...
- linux /bin/bash^M: bad interpreter的解决办法
linux下执行shell脚本时报错:-bash: ./a.sh: /bin/bash^M: bad interpreter: No such file or directory. 原因是window ...
- Python入门篇-内建函数
Python入门篇-内建函数 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.常见的内建函数案例 1>.标识id 返回对象的唯一标识,CPython返回内存地址. #!/ ...
- [USACO15DEC]最大流Max Flow(树上差分)
题目描述: Farmer John has installed a new system of N−1N-1N−1 pipes to transport milk between the NNN st ...
- C# 退出应用程序的几种方法
Application.Exit();//好像只在主线程可以起作用,而且当有线程,或是阻塞方法的情况下,很容易失灵 this.Close();//只是关闭当前窗体. Application.ExitT ...
- (4)ardunio 矩阵求解官方库改造,添加逆的求解
多此一举,原来官方库给了求逆的函数,在源码里 除此之外,还有转置矩阵,只不过样例没显示出来. //Matrix Inversion Routine // * This function inverts ...
- go选项模式
package main import "fmt" type optionClient func(*options) func setAge(a int) optionClient ...
- Nodejs中的路径问题
一.path核心模块 ①path.basename(path[,ext])获取一个路径中的文件名 var path=require('path'); console.log(path.basename ...
- c博客06-结构
1.本章学习总结(2分) 1.1 学习内容总结 结构体如何定义.成员如何赋值 结构体数组排序做法 结构体指针怎么用 共用体.枚举类型做法 文件读写,文件中数据如何读进结构体数组 1.2 本章学习体会 ...