OpenCV3入门(八)图像边缘检测
1、边缘检测基础
图像的边缘是图像的基本特征,边缘点是灰度阶跃变化的像素点,即灰度值的导数较大或极大的地方,边缘检测是图像识别的第一步。用图像的一阶微分和二阶微分来增强图像的灰度跳变,而边缘也就是灰度变化的地方。因此,这些传统的一阶微分算子如Robert、Sobel、prewitt等,以及二阶微分算子Laplacian等等本质上都是可以用于检测边缘的。这些算子都可以称为边缘检测算子。
边缘检测可以大幅度的减少数据量,剔除那些不相关的信息,保留图像重要的结构属性,一般的边缘检测的步骤有:
1)滤波
边缘检测主要基于图像的一阶和二阶微分,但是导数、微分对噪声很敏感,梯度计算容易受噪声影响,因此需要用滤波来抑制噪声。
2)增强
为了检测边界,需要确定邻域中灰度变化,增强边缘的基础是确定图像各点邻域强度的变化值,利用锐化突出了灰度变化的区域。
3)检测
经过增强的图像,邻域中很多点的梯度值比较大,但是并不是所有点都是边缘点,需要采用某种方法来取舍,一般使用阈值来划分图像各点。
2、边缘检测算子
2.1一阶微分算子
1)原理
图像的边缘就是图像灰度发生快速变化的地方。对于f(t),其导数f'(t)反映了每一处的变化趋势,在变化最快的位置其导数最大,sobel算子的思路就是模拟求一阶导数。
其中:
梯度的方向就是函数f(x,y)最大变化率的方向。梯度的幅值作为最大变化率大小的度量,值为:

离散的二维函数f(i,j),可以用有限差分作为梯度的一个近似值。

为了简化计算,可以用绝对值来近似。
|▽f(i,j)|= |f(i+1,j)-f(i,j)| +|f(i,j+1)-f(i,j)|
2)Sobel算子
Sobel算子是离散微分算子(discrete differentiation operator),用来计算图像灰度的近似梯度,梯度越大越有可能是边缘,Sobel集合了高斯平滑和微分求导,又被称为一阶微分算子、求导算子,在水平和垂直两个方向上求导,得到的是图像在X方法与Y方向梯度图像。
函数原型:
CV_EXPORTS_W void Sobel( InputArray src, OutputArray dst, int ddepth,
int dx, int dy, int ksize = ,
double scale = , double delta = ,
int borderType = BORDER_DEFAULT );
示例代码:
img = imread("D:\\WORK\\5.OpenCV\\LeanOpenCV\\pic_src\\pic7.bmp", IMREAD_GRAYSCALE);
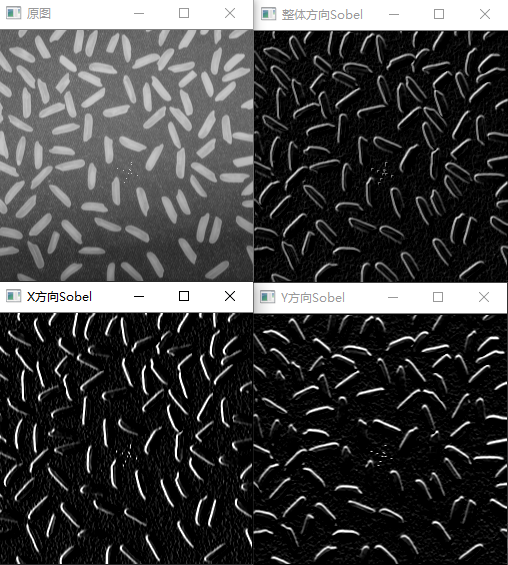
imshow("原图", img);
//X方向梯度
Sobel(img, imgX, CV_8U, , , , , , BORDER_DEFAULT);
convertScaleAbs(imgX, imgX);
imshow("X方向Sobel", imgX);
//Y方向梯度
Sobel(img, imgY, CV_8U, , , , , , BORDER_DEFAULT);
convertScaleAbs(imgY, imgY);
imshow("Y方向Sobel", imgY);
//合并梯度(近似)
addWeighted(imgX, 0.5, imgY, 0.5, , img2);
imshow("整体方向Sobel", img2);
输出结果为:
2.2二阶微分算子
1)原理
二维函数f(x,y)在二阶微分(拉普拉斯算子)的定义为:

将上式相加后就得到拉普拉斯算子:

对应的滤波模板如下:
考虑到求绝对值计算梯度,正负系数图形的响应一样,上面的模板也可以表示为:
上面的模板具有对称性,所以求一次滤波就可以,不需要像一阶微分那样计算2次。
2)应用
拉普拉斯算子是二阶微分算子,对噪声敏感,Laplace算子对孤立象素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。高斯-拉普拉斯算子,又称LoG算子,就是为了补充这种缺陷被创立的,它先进行高斯低通滤波,然后再进行拉普拉斯二阶微分锐化。
示例如下。
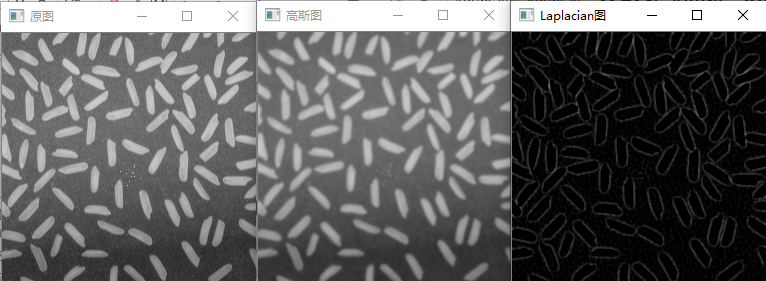
img = imread("D:\\WORK\\5.OpenCV\\LeanOpenCV\\pic_src\\pic7.bmp", IMREAD_GRAYSCALE);
imshow("原图", img);
GaussianBlur(img, img2, Size(, ), , );
imshow("高斯图", img2);
Laplacian(img2, img3, CV_8U, , , );
imshow("Laplacian图", img3);
输出结果为:
2.3 Canny算子
1)原理
在图像边缘检测中,抑制噪声和边缘精准定位是无法同时满足的,一些边缘检测算法通过平滑滤波去除噪声的同时,也增加了边缘检测的不确定性,而提高边缘检测算子对边缘的敏感性的同时,也提高了对噪声的敏感性。Canny算子力图在抗噪声干扰和精准定位之间寻求最佳折中方案。
Canny算法主要有4个步骤:
- 用高斯滤波器来平滑图像;
- 用一介偏导的有限差分来计算梯度的幅值和方向;
- 对梯度进行非极大值抑制,保留极大值,抑制其他值;
- 用双阈值算法检测和连接边缘。
2)应用
函数原型为:
CV_EXPORTS_W void Canny( InputArray image, OutputArray edges,
double threshold1, double threshold2,
int apertureSize = , bool L2gradient = false );
示例如下:
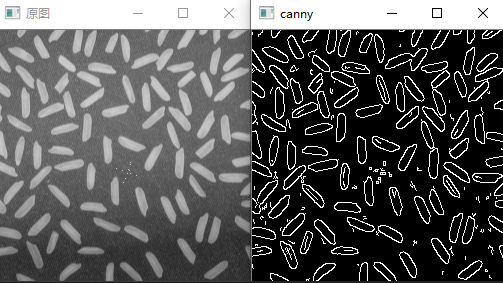
img = imread("D:\\WORK\\5.OpenCV\\LeanOpenCV\\pic_src\\pic7.bmp", IMREAD_GRAYSCALE);
imshow("原图", img);
Canny(img, img2, , , );
imshow("canny", img2);
输出效果如下图。

修改阈值之后,Canny(img, img2, 45, 90, 3);效果如下图。
3、参考文献
1、《OpenCV3 编程入门》,电子工业出版社,毛星雨著
2、《学习OpenCV》,清华大学出版社,Gary Bradski, Adrian kaehler著
3、Sobel边缘检测
https://www.cnblogs.com/yibeimingyue/p/10878514.html
4、学习笔记-canny边缘检测
https://www.cnblgs.com/mmmmc/p/10524640.html
个人博客,转载请注明。
OpenCV3入门(八)图像边缘检测的更多相关文章
- 图像边缘检测——几种图像边缘检测算子的学习及python 实现
本文学习利用python学习边缘检测的滤波器,首先读入的图片代码如下: import cv2 from pylab import * saber = cv2.imread("construc ...
- CSharpGL(24)用ComputeShader实现一个简单的图像边缘检测功能
CSharpGL(24)用ComputeShader实现一个简单的图像边缘检测功能 效果图 这是红宝书里的例子,在这个例子中,下述功能全部登场,因此这个例子可作为使用Compute Shader的典型 ...
- 图像边缘检测--OpenCV之cvCanny函数
图像边缘检测--OpenCV之cvCanny函数 分类: C/C++ void cvCanny( const CvArr* image, CvArr* edges, double threshold1 ...
- Python实现图像边缘检测算法
title: "Python实现图像边缘检测算法" date: 2018-06-12T17:06:53+08:00 tags: ["图形学"] categori ...
- 网络编程懒人入门(八):手把手教你写基于TCP的Socket长连接
本文原作者:“水晶虾饺”,原文由“玉刚说”写作平台提供写作赞助,原文版权归“玉刚说”微信公众号所有,即时通讯网收录时有改动. 1.引言 好多小白初次接触即时通讯(比如:IM或者消息推送应用)时,总是不 ...
- C#基础入门 八
C#基础入门 八 泛型 C#中的泛型能够将类型作为参数来传递,即在创建类型时用一个特定的符号,如"T"来作为一个占位符,代替实际的类型,等待实例化时用一个实际的类型来代替. pub ...
- cesium编程入门(八)设置材质
cesium编程入门(八)设置材质 Cesium中为几何形状设置材质有多种方法 第一种方法 Material 直接构建Cesium.Material对象,通过设置Material的属性来进行控制,官方 ...
- 14图像边缘检测的sobel_ctrl控制模块
一设计功能 计算得到的dxy,再通过和阈值比较大小,输出po_sum作为VGA的输入,在显示器器上显示图像的轮廓. 二设计思路 根据前一篇博客对sobel算法的介绍,先通过FIFO的双流水线操作采集到 ...
- OpenCV3入门(十)图像轮廓
1.图像轮廓 1.1图像轮廓与API函数 轮廓是一系列相连的点组成的曲线,代表了物体的基本外形,相对于边缘,轮廓是连续的,边缘并不全部连续.一般地,获取图像轮廓要经过下面几个步骤: 1) 读取 ...
随机推荐
- BeanUtils 如何拷贝 List?
BeanUtils 如何拷贝 List? 一.背景 我们在DO.Model.VO层数据间可能经常转换数据: Entity对应的是持久层数据结构(一般是数据库表的映射模型); Model 对应的是业务层 ...
- echarts设置柱状图颜色渐变及柱状图粗细大小
series: [ { name: '值', type: 'bar', stack: '总量', //设置柱状图大小 barWidth : 20, //设置柱状图渐变颜色 itemStyle: { n ...
- Scala实践3
一.函数式对象 1.1 rational类的规格和创建 Rational类来源于有理数(rational number),来表示n(分子)/d(分母)的数字,同时对有理数的运算(加减乘除)建模,还具 ...
- 重拾c++第二天(4):复合类型
1.定义:种类 数组名[元素个数] = {元素1,...,元素n} ,或者直接赋值:数组名[元素位置] = 值; 2.部分初始化,其他全为0,可以就定义一个0,这样得到0数组(或者就一个{},别的啥也 ...
- OffSet和Utc
DateTime dtt = System.DateTime.Now ;//utcnow是格林威治的时间,与北京时间-8 strin(dtt); public static string strin( ...
- Java同步与异步
一.关键字: thread(线程).thread-safe(线程安全).intercurrent(并发的) synchronized(同步的).asynchronized(异步的). volatile ...
- day6 云道页面 知识点梳理(1)
关于块级元素.行内元素.行内块元素的梳理 (1)块级元素 特点: a.可以设置宽高,行高,外边距和内边距 b.块级元素会独占一行 c.宽度默认是容器的100% d.可以容纳内联元素 ...
- 基于selenium爬取京东
爬取iphone 注意:browser对象会发生变化,当对当前网页做任意操作时 import time from selenium import webdriver from selenium.web ...
- 「 深入浅出 」集合List
第一篇文章 「 深入浅出 」java集合Collection和Map 主要讲了对集合的整体介绍,本篇文章主要讲List相对于Collection新增的一些重要功能以及其重要子类ArrayList.Li ...
- (转)调皮的location.href
来自 wooyun'drops --->呆子不开口 0x00 背景 随着水瓶月的到来,在祖国繁荣昌盛的今天,web系统的浏览器端也越来越重,很多的功能逻辑都放在了js中,前端的漏洞也越来越多. ...