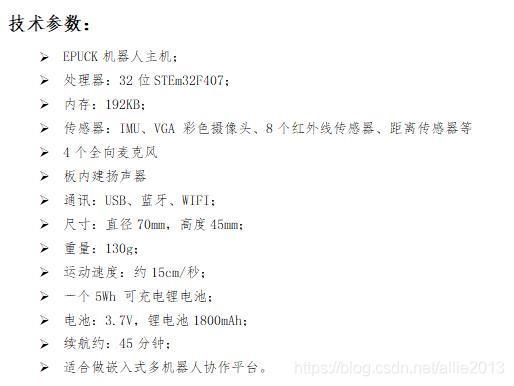
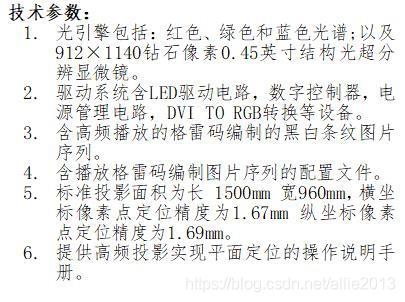
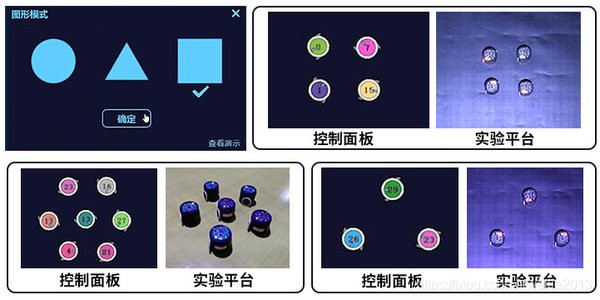
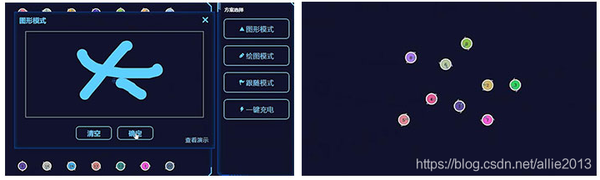
基于E-PUCK 2.0多智能体自主协同 高频投影定位系统






基于E-PUCK 2.0多智能体自主协同 高频投影定位系统的更多相关文章
- 基于ROBO-MAS多智能体自主协同 高频投影定位系统
- 伯克利推出「看视频学动作」的AI智能体
伯克利曾经提出 DeepMimic框架,让智能体模仿参考动作片段来学习高难度技能.但这些参考片段都是经过动作捕捉合成的高度结构化数据,数据本身的获取需要很高的成本.而近日,他们又更进一步,提出了可以直 ...
- TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- DRL 教程 | 如何保持运动小车上的旗杆屹立不倒?TensorFlow利用A3C算法训练智能体玩CartPole游戏
本教程讲解如何使用深度强化学习训练一个可以在 CartPole 游戏中获胜的模型.研究人员使用 tf.keras.OpenAI 训练了一个使用「异步优势动作评价」(Asynchronous Advan ...
- STM32W108无线传感器网络节点自组织与移动智能体导航技术
使用STM32W108无线开发板及节点完毕大规模网络的自组建,网络模型选择树型,网络组建完毕之后,使用基于接收信号强度指示RSSI(ReceivedSignal Strength Indication ...
- NVIDIA DeepStream 5.0构建智能视频分析应用程序
NVIDIA DeepStream 5.0构建智能视频分析应用程序 无论是要平衡产品分配和优化流量的仓库,工厂流水线检查还是医院管理,要确保员工和护理人员在照顾病人的同时使用个人保护设备(PPE),就 ...
- 基于STM32+华为云IOT设计智能称重系统
摘要:选择部署多个重量传感器和必要的算法.通过WiFi 通信模块.GPS定位模块,采集车辆称重数据一地理位置信息,并通过网络发送至云平台,设计图形化UI界面展示称重.地图位置等重要信息,实现对称重系统 ...
- 基于Visual C++6.0的DLL编程实现
整理自基于Visual C++6.0的DLL编程实现 本文通过通俗易懂的方式,全面介绍了动态链接库的概念.动态链接库的创建和动态链接库的链接,并给出个简单明了的例子,相信读者看了本文后,能够创建自己的 ...
- iKcamp出品|微信小程序|工具安装+目录说明|基于最新版1.0开发者工具初中级教程分享
iKcamp官网:http://www.ikcamp.com 访问官网更快阅读全部免费分享课程:<iKcamp出品|全网最新|微信小程序|基于最新版1.0开发者工具之初中级培训教程分享>. ...
随机推荐
- moviepy执行TextClip.search方法时报错TypeError: a bytes-like object is required, not str
☞ ░ 前往老猿Python博文目录 ░ 执行TextClip.search方法时,报错: >>> from moviepy.editor import * >>> ...
- PyQt(Python+Qt)学习随笔:树型部件QTreeWidget的itemAbove、itemBelow方法作用探究
老猿Python博文目录 专栏:使用PyQt开发图形界面Python应用 老猿Python博客地址 在QTreeWidget的方法中,对于itemBelow.itemAbove方法,官网文档介绍非常简 ...
- pandas LabelEncoder 测试集出现了训练集中未出现过的值怎么解决(y contains previously unseen labels 解决方法)
for i in categorical_ix: le = joblib.load(f"./LabelEncoder/{i}_LabelEncoder.model") #由于tes ...
- react路由初探(2)
对着官网的例子反正是没有搞出来,所以搜了一大堆,最终搞出来了,记录一下 import React from 'react'; // 首先我们需要导入一些组件... (这个是中文网示例,按这个做,报一大 ...
- Codeforces Edu Round 53 A-D
A. Diverse Substring 找普遍性(特殊解即可). 最简单的便是存在一个区间\([i, i + 1] (1 <= i < n)\),且$str[i] $ $ != str[ ...
- Java集合源码分析(五)——HashMap
简介 HashMap 是一个散列表,存储的内容是键值对映射. HashMap 继承于AbstractMap,实现了Map.Cloneable.java.io.Serializable接口. HashM ...
- NameSilo的DDNS动态域名解析
用Java写的,一个实时检测IP变化并更新DNS状态的工具,适用于在NameSilo购买的域名,如果你的域名是在其他商家购买的,修改为你自己的api就行.代码我放github了,地址: https:/ ...
- 使用 open 函数 写的代码 用户名登录
先创建文件ha.log 内容: aaa$$123bbb$$456 def dl(user,pas): f = open('ha.log', 'r', encoding="utf-8" ...
- DjangoRestFramework使用
目录: 1.1 DjangoRestFramework基本使用 1.2 drf认证&权限 模块 1.3 djangorestframework 序列化 1.4 djangorestframew ...
- uni-app全局属性和方法
全局变量和全局方法是软件开发中常用的技术点! 实现方式大致分为: 1.vuex实现,值变动灵活 2.建立js文件,页面内引用 3.挂载vue实例后使用 4.小程序中的globalData 5.本地存储 ...