【Notes_3】现代图形学入门——基础变换、MVP变换模型
基础变换(二维)
三维变化与二维变换矩阵类似
齐次坐标下的基础变换
Scale:
s_x &0 &0\\
0 & s_y & 0 \\
0&0&1
\end{pmatrix}\]
Rotation:
\cos\alpha& - \sin\alpha & 0 \\
\sin\alpha & \cos \alpha &0 \\
0&0&1
\end{pmatrix}\]
Translation:
1 & 0 & t_x \\
0 &1& t_y\\
0 &0& 1
\end{pmatrix}\]
组合变换(Compositon Transform)
矩阵变换把先变化的矩阵放到右边:矩阵运算是从右向左

四元数与旋转公式
四元数
罗德里格斯旋转公式
Rodrigue's Rotation Formula: Raotation by angle \(\alpha\) around axis \(\vec{n}\)
\begin{matrix} \underbrace{
\begin{pmatrix}
0 & -n_z & n_y \\
n_z & 0 & -n_x \\
-n_y & n_x & 0
\end{pmatrix}
} \\ N\end{matrix}\]
In the formula
I :Identity matrix
最后乘积的结果是一个3*3的矩阵
MVP变换
Model Transformation
引用博客:MVP变换
对模型进行模型变换时,需要注意坐标系是在世界坐标系原点。当绕模型中心进行变换时,首先要将模型的中心点移动到世界坐标系的原点,之后在进行模型变换,之后移回到原来的位置。
矩阵描述为:$$M=M_t^{-1} M_r M_s M_t$$
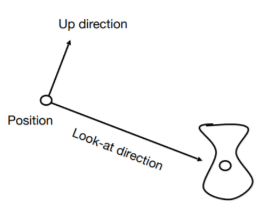
View/Camera Transformation
这个过程是将确定相机的位置:将相机的位置通过下面的过程移动到固定的点和方向。
(1) 相机的位置固定在世界坐标系的原点: \(\vec{e}\)
(2) 相机的朝向 \(-\vec{Z}\): \(\hat{g}\)
(3) 相机的向上方向\(\vec Y\): \(\hat t\)
基于上述过程,要求视图变换矩阵\(M_{view}\)分别求相机的平移矩阵\(T_{view}\)、旋转矩阵\(R_{view}\)
1 & 0 & 0 & -x_{\vec{e}} \\
0 & 1 & 0 & -y_{\vec{e}} \\
0 & 0 & 1 & -z_{\vec{e}} \\
0 & 0 & 0 & 1
\end{bmatrix}\]
求旋转矩阵时,直接求相机旋转到原点的矩阵不容易求解,但求原点到相机位置的旋转矩阵容易求。
所以先求原点到相机的旋转矩阵:Z To \(-\hat{g}\)、Y To \(\hat{t}\)、最后保证\(\vec{X}\) To \((\hat g \times \hat t)\) 朝向的方向,原因是保证符合右手坐标系。
x_{\hat{g} \times \hat{t}}&x_{t}&x_{-g}&0\\
y_{\hat{g} \times \hat{t}}&x_{t}&y_{-g}&0\\
z_{\hat{g} \times \hat{t}}&x_{t}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}\]
因为\(R_{view}^{-1}\)是正交矩阵,所以逆矩阵和旋转矩阵相同。
x_{\hat{g} \times \hat{t}}&y_{\hat{g} \times \hat{t}}&z_{\hat{g} \times \hat{t}}&0\\
x_{t}&y_{t}&z_{t}&0\\
x_{-g}&y_{-g}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}\]
所以
\begin{bmatrix}
x_{\hat{g} \times \hat{t}}&y_{\hat{g} \times \hat{t}}&z_{\hat{g} \times \hat{t}}&0\\
x_{t}&y_{t}&z_{t}&0\\
x_{-g}&y_{-g}&z_{-g}&0\\
0&0&0&1
\end{bmatrix}
\]
1 & 0 & 0 & -x_{\vec{e}} \\
0 & 1 & 0 & -y_{\vec{e}} \\
0 & 0 & 1 & -z_{\vec{e}} \\
0 & 0 & 0 & 1
\end{bmatrix}\]
Projection Transformation
个人理解投影变换的终极目的是让物体挤压在一个单位大小的平面(空间)内。原因先挖个坑。
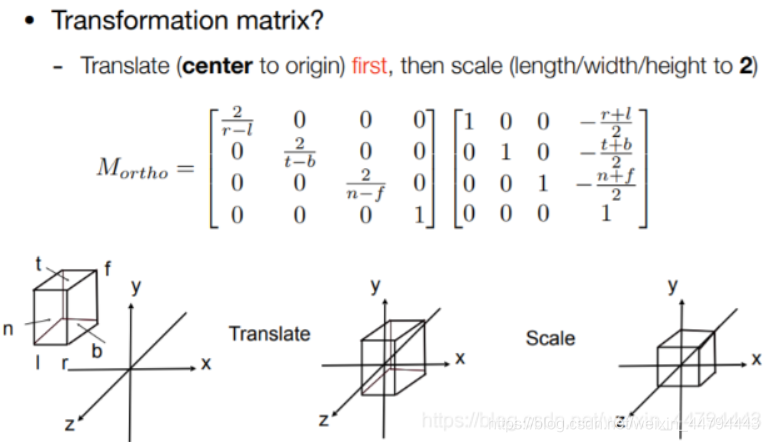
Orthographic Projection
简单理解就是将物体的忽略z坐标,将模型通过Scale To [-1,-1]^2平面内。
真正的操作:
(1) 移动模型的位置到原点
(2) 缩放模型到空间[-1,1]^3中
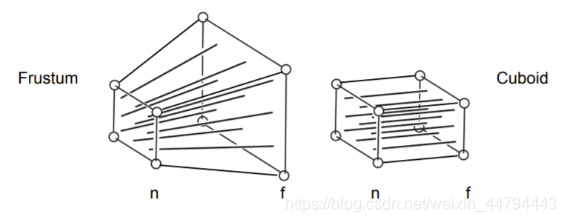
Perspective Projection
正视投影的光线可以看成是一个立方体,如上图。透视投影的光线可以看成一个视锥,如下图。
透视变换可以分为两个步骤进行:
(1) 将视锥挤压到立方体内\(M_{persp->ortho}\)
(2) 将挤压后的视锥进行正视投影变换$M_{ortho}
挤压时的变换矩阵\(M_{persp->ortho}=\begin{bmatrix}
n&0&0&0\\
0&n&0&0\\
0&0&n+f&-nf\\
0 & 0&1&0
\end{bmatrix}\)
所以投影变换矩阵
\]
【Notes_3】现代图形学入门——基础变换、MVP变换模型的更多相关文章
- [计算机图形学]视图变换:MVP变换、视口变换
目录 一.MVP变换 1. 模型变换 1.1 缩放矩阵 1.2 旋转矩阵 1.3 平移矩阵 2. 视角变换 3. 投影变换 二.Viewport变换 一.MVP变换 MVP变换是模型变换(M).视角变 ...
- SVG 2D入门6 - 坐标与变换
坐标系统 SVG存在两套坐标系统:视窗坐标系与用户坐标系.默认情况下,用户坐标系与视窗坐标系的点是一一对应的,都为原点在视窗的左上角,x轴水平向右,y轴竖直向下:如下图所示: SVG的视窗位置一般是由 ...
- 【Notes】现代图形学入门_01
跟着闫令琪老师的课程学习,总结自己学习到的知识点 课程网址GAMES101 B站课程地址GAMES101 课程资料百度网盘[提取码:0000] 计算机图形学概述 计算机图形学是一门将模型转化到屏幕上图 ...
- 浅入kubernetes(1):Kubernetes 入门基础
目录 Kubernetes 入门基础 Introduction basic of kubernetes What Is Kubernetes? Components of Kubernetes Kub ...
- 【Notes_4】现代图形学入门——光栅化、离散化三角形、深度测试与抗锯齿
光栅化 Viewport Transform(视口变换) 将经过MVP变换后得到的单位空间模型变换到屏幕上,屏幕左边是左下角为原点. 所以视口变换的矩阵 \[M_{viewport}=\begin{p ...
- mybatis入门基础(二)----原始dao的开发和mapper代理开发
承接上一篇 mybatis入门基础(一) 看过上一篇的朋友,肯定可以看出,里面的MybatisService中存在大量的重复代码,看起来不是很清楚,但第一次那样写,是为了解mybatis的执行步骤,先 ...
- 01shell入门基础
01shell入门基础 为什么学习和使用shell编程 shell是一种脚本语言,脚本语言是相对于编译语言而言的.脚本语言不需要编译,由解释器读取程序并且执行其中的语句,而编译语言需要编译成可执行代码 ...
- Markdown入门基础
// Markdown入门基础 最近准备开始强迫自己写博文,以治疗严重的拖延症,再不治疗就“病入骨髓,司命之所属,无奈何”了啊.正所谓“工欲善其事,必先利其器”,于是乎在写博文前,博主特地研究了下博文 ...
- JavaScript入门基础
JavaScript基本语法 1.运算符 运算符就是完成操作的一系列符号,它有七类: 赋值运算符(=,+=,-=,*=,/=,%=,<<=,>>=,|=,&=).算术运 ...
随机推荐
- SQL系列总结——基础篇(三)
之前的两篇文章SQL系列总结:<基础篇一>, <基础篇二>已经介绍了一些基本的数据库知识.现在让我们来从头开始构建一个数据库.到管理数据库和对象. 架构开始! 1.创建 ...
- Jenkins(6)测试报告邮件发送
前言 前面已经实现在jenkins上展示html的测试报告,接下来只差最后一步,把报告发给你的领导,展示你的劳动成果了. 安装 Email Extension Plugin 插件 jenkins首页- ...
- 深入浅出Java线程池:源码篇
前言 在上一篇文章深入浅出Java线程池:理论篇中,已经介绍了什么是线程池以及基本的使用.(本来写作的思路是使用篇,但经网友建议后,感觉改为理论篇会更加合适).本文则深入线程池的源码,主要是介绍Thr ...
- 正点原子DS100拆解全过程-硬件工程师必备
前言: 之前一篇只针对正点原子DS100手持示波器的使用介绍文章.可作为一个电子工程师,光使用不是我们的风格哈,我们还要拆开看看电路. 开拆 外壳 首先,看下图,DS100不是使用螺母进行固定的,而是 ...
- vs中python包安装教程
vs安装python很简单,只需要在vs安装包中选择python就可以了,这里使用的python3.7: 如果有了解,都知道安装python包的指令:"pip install xxx&quo ...
- 2019 ICPC Asia Nanjing Regional
2019 ICPC Asia Nanjing Regional A - Hard Problem 计蒜客 - 42395 若 n = 10,可以先取:6,7,8,9,10.然后随便从1,2,3,4,5 ...
- python3 anaconda 安装pyhook3 pythoncom(pywin32)
为什么不安装pyhook 1.pyhook不支持python3 2.网络上有一些方法下载pyhook的whl然后pip安装到python3,可以运行,但是会因为编码问题导致移动到窗口标题含有非ASCI ...
- Linux POSIX共享内存方法&ipcs &struct shmid_ds
内容是主进程创建子进程计算斐波那契数列. 其中计算到第几项是有主进程命令行输入. 共享内存段,并且查看了一些信息. 参考操作系统概念第七版 3.10,3.11 关于LINUX C库函数 中的 fpri ...
- 翻译:《实用的Python编程》01_02_Hello_world
目录 | 上一节 (1.1 Python) | 下一节 (1.3 数字) 1.2 第一个程序 本节讨论有关如何创建一个程序.运行解释器和调试的基础知识. 运行 Python Python 程序始终在解 ...
- 007.NET5 Log4Net组件使用
NET 5 Log4Net组件使用 1. Nuget引入程序集:log4net + Microsfot.Extensions.Logging.Log4Net.AspNetCore 2. 准备配置文件 ...