FPGA加三移位算法:硬件逻辑实现二进制转BCD码
本文设计方式采用明德扬至简设计法。利用FPGA来完成显示功能不是个很理想的方式,当显示任务比较复杂,要通过各种算法显示波形或者特定图形时,当然要用单片机通过C语言完成这类流程控制复杂,又对时序要求不高的任务(这也坚定了我学习SOPC的决心)。但要驱动如LCD1602/LCD12864打印字符,显示系统工作状态还是比较方便的。
数字系统内部均为二进制比特信息,而打印字符需要先将其转换成BCD码,并进一步转为ASCII字符才能正常显示。这一简单算法的软件实现非常简单,但要是用硬件逻辑完成其中多个乘除法运算无疑浪费很多硬件资源,这时最常用的做法就是通过移位操作代替乘除法运算。适用于FPGA实现的二进制序列转BCD码算法是“加三移位”。小梅哥FPGA进阶系列教程中的《二进制转BCD》文章中对其进行了详细说明【小梅哥FPGA进阶教程】第二章 二进制转BCD - FPGA/CPLD - 电子工程世界-论坛http://bbs.eeworld.com.cn/thread-510929-1-1.html
本文仅重点阐述设计方式。加三移位算法以8位二进制转BCD码为例,BCD码需要3位,一共12bit(8是2的3次方)。每次将剩余的待转换二进制序列最高位左移进BCD码寄存器,每移一位后判断每一位BCD码是否大于4,若是则加3调整,否则不变。直至移位8次后结束。注:最后一次移位不需要加3调整。可以发现上述过程可以利用一个非常简单的状态机实现:

BCD码以4bit为1位,非常适合存储器模型,这里使用:reg [4-1:0] bcd_code [3-1:0];//该存储器由3个位宽为4bit的寄存器组成。每到SHIFT状态下,进行一次左移操作,随后进入ADD_3状态判断是否需要加3操作。当移位8次后进入ASCII状态利用查表法找出ASCII中对应数字,最后等待LCD控制模块完成显示任务后回到IDLE状态继续响应后续数据。以下是完整代码。
`timescale 1ns / 1ps /*
显示编码模块:
1 完成二进制数值与BCD码的转换
2 完成BCD码的字符编码
3 一次性送出拼接后编码数据
*/ module disp_code#(parameter DATA_W = )(
input clk,
input rst_n,
//MAX30102_ctrl侧接口
input [DATA_W-:] din,
input din_vld,
output reg code_rdy,
//LCD_CTRL侧接口
output reg [DATA_W-:] dout,
output reg dout_vld,
input lcd_ctrl_rdy
); /*
编码转换流程:
1 检测BCD码寄存器每四位数值是否大于4,若是则加3,否则不处理;
2 左移一位,将待转换二进制数最高位送入寄存器;
3 第n次移位后进行字符编码;
*/ localparam LOG_DATA_W = ,
STA_W = ; localparam IDLE = ;
localparam ADD_3 = ;
localparam SHIFT = ;
localparam ASCII = ;
localparam WAIT_LCD = ; reg [ (-):] shift_cnt ;
wire add_shift_cnt ;
wire end_shift_cnt ;
reg [ (-):] char_cnt ;
wire add_char_cnt ;
wire end_char_cnt ;
reg [ (DATA_W-):] data_tmp ;
reg [ (DATA_W-):] tfrac_tmp ;
reg [-:] bcd_code [LOG_DATA_W-:];
reg [ (-):] disp_data ;
wire idle2shift ;
wire add_32shift ;
wire shift2add_3 ;
wire shift2ascii ;
wire ascii2wait_lcd ;
wire wait_lcd2idle ;
reg lcd_rdy_r ;
reg busy_flag ;
reg [STA_W-:] state_c;
reg [STA_W-:] state_n;
wire lcd_rdy_pos;
wire data_in_vld; //移位次数计数器
always @(posedge clk or negedge rst_n) begin
if (rst_n==) begin
shift_cnt <= ;
end
else if(add_shift_cnt) begin
if(end_shift_cnt)
shift_cnt <= ;
else
shift_cnt <= shift_cnt+ ;
end
end
assign add_shift_cnt = (state_c == SHIFT);
assign end_shift_cnt = add_shift_cnt && shift_cnt == (DATA_W)- ; //字符个数计数器
always @(posedge clk or negedge rst_n) begin
if (rst_n==) begin
char_cnt <= ;
end
else if(add_char_cnt) begin
if(end_char_cnt)
char_cnt <= ;
else
char_cnt <= char_cnt+ ;
end
end
assign add_char_cnt = (state_c == ASCII);
assign end_char_cnt = add_char_cnt && char_cnt == (LOG_DATA_W)- ; //数据寄存
always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
data_tmp <= () ;
end
else if(data_in_vld)begin
data_tmp <= (din) ;
end
end /*********************************************状态机****************************************************/
always @(posedge clk or negedge rst_n) begin
if (rst_n==) begin
state_c <= IDLE ;
end
else begin
state_c <= state_n;
end
end always @(*) begin
case(state_c)
IDLE :begin
if(idle2shift )
state_n = SHIFT ;
else
state_n = state_c ;
end
SHIFT :begin
if(shift2add_3 )
state_n = ADD_3 ;
else if(shift2ascii )
state_n = ASCII ;
else
state_n = state_c ;
end
ADD_3 :begin
if(add_32shift )
state_n = SHIFT ;
else
state_n = state_c ;
end
ASCII :begin
if(ascii2wait_lcd )
state_n = WAIT_LCD ;
else
state_n = state_c ;
end
WAIT_LCD:begin
if(wait_lcd2idle)
state_n = IDLE;
else
state_n = state_c;
end
default : state_n = IDLE ;
endcase
end assign idle2shift = state_c == IDLE && (din_vld);
assign shift2add_3 = state_c == SHIFT && (!end_shift_cnt);
assign shift2ascii = state_c == SHIFT && (end_shift_cnt);
assign add_32shift = state_c == ADD_3 && ('b1);
assign ascii2wait_lcd = state_c == ASCII && (end_char_cnt);
assign wait_lcd2idle = state_c == WAIT_LCD && lcd_rdy_pos; /*********************************************编码过程****************************************************/
//binary code ---> 8421bcd code
always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
bcd_code[] <= () ;
end
else if(state_c == ADD_3 && bcd_code[] > 'd4)begin
bcd_code[] <= (bcd_code[] + 'd3) ;
end
else if(state_c == SHIFT)
bcd_code[] <= {bcd_code[][:],data_tmp[DATA_W--shift_cnt]};
end always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
bcd_code[] <= () ;
end
else if(state_c == ADD_3 && bcd_code[] > 'd4)begin
bcd_code[] <= (bcd_code[] + 'd3) ;
end
else if(state_c == SHIFT)
bcd_code[] <= {bcd_code[][:],bcd_code[][]};
end always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
bcd_code[] <= () ;
end
else if(state_c == ADD_3 && bcd_code[] > 'd4)begin
bcd_code[] <= (bcd_code[] + 'd3) ;
end
else if(state_c == SHIFT)
bcd_code[] <= {bcd_code[][:],bcd_code[][]};
end always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
disp_data <= () ;
end
else if(add_char_cnt)begin
disp_data <= (bcd_code[LOG_DATA_W- - char_cnt]) ;
end
end /*********************************************接口信号****************************************************/ always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
lcd_rdy_r <= () ;
end
else if(state_c == WAIT_LCD)begin
lcd_rdy_r <= (lcd_ctrl_rdy) ;
end
end assign lcd_rdy_pos = lcd_ctrl_rdy == && lcd_rdy_r == ; always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
busy_flag <= () ;
end
else if(data_in_vld)begin
busy_flag <= ('b1) ;
end
else if(wait_lcd2idle)begin
busy_flag <= () ;
end
end assign data_in_vld = state_c == IDLE && din_vld; always@(*)begin
if(!lcd_ctrl_rdy || busy_flag || data_in_vld)
code_rdy = ;
else
code_rdy = ;
end /*********************************************编码后数据输出****************************************************/
// ASCII CODE
always@(*)begin
case(disp_data)
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
:dout = "";
default:dout = "";
endcase
end always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
dout_vld <= () ;
end
else if(add_char_cnt)begin
dout_vld <= ('b1) ;
end
else
dout_vld <= ;
end endmodule
接下来用testbench仿真验证逻辑功能,在测试向量中要模拟LCD控制模块和数据源上游模块的行为,并通过显示编码方式验证待测试模块状态机当前状态。
`timescale 1ns / 1ps
//////////////////////////////////////////////////////////////////////////////////
// Company:
// Engineer:
//
// Create Date: 2018/03/15 18:32:05
// Design Name:
// Module Name: disp_code_tb
// Project Name:
// Target Devices:
// Tool Versions:
// Description:
//
// Dependencies:
//
// Revision:
// Revision 0.01 - File Created
// Additional Comments:
//
////////////////////////////////////////////////////////////////////////////////// module disp_code_tb; reg clk;
reg rst_n;
reg [-:] din;
reg din_vld;
wire code_rdy;
wire [-:] dout;
wire dout_vld;
reg lcd_ctrl_rdy; reg [ (-):] wait_cnt ;
wire add_wait_cnt ;
wire end_wait_cnt ;
reg [*-:] code_state;
reg lcd_ctrl_busy ; //待测试模块例化
disp_code#(.DATA_W())
uut(
.clk (clk),
.rst_n (rst_n), .din (din),
.din_vld (din_vld),
.code_rdy (code_rdy), .dout (dout),
.dout_vld (dout_vld),
.lcd_ctrl_rdy(lcd_ctrl_rdy)
);
parameter CYC = ,
RST_TIM = ; initial begin
clk = ;
forever #(CYC/) clk = ~clk;
end initial begin
rst_n = ;
#;
rst_n = ;
#(CYC*RST_TIM)
rst_n = ;
#100_000;
$stop;
end //模拟LCD控制模块行为
always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
lcd_ctrl_busy <= () ;
end
else if(dout_vld)begin
lcd_ctrl_busy <= ('b1) ;
end
else if(end_wait_cnt)begin
lcd_ctrl_busy <= () ;
end
end always@(*)begin
if(lcd_ctrl_busy || dout_vld)
lcd_ctrl_rdy = ;
else
lcd_ctrl_rdy = 'b1;
end always @(posedge clk or negedge rst_n) begin
if (rst_n==) begin
wait_cnt <= ;
end
else if(add_wait_cnt) begin
if(end_wait_cnt)
wait_cnt <= ;
else
wait_cnt <= wait_cnt+ ;
end
end
assign add_wait_cnt = (lcd_ctrl_rdy == );
assign end_wait_cnt = add_wait_cnt && wait_cnt == ()- ; //模拟数据源行为
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
din <= ;
else if(code_rdy)
din <= 'h20;
end always @(posedge clk or negedge rst_n )begin
if(rst_n==) begin
din_vld <= () ;
end
else if(code_rdy)begin
din_vld <= ('b1) ;
end
else begin
din_vld <= () ;
end
end //状态显示编码
always@(*)begin
case(uut.state_c)
'd0:code_state = "IDLE";
'd1:code_state = "ADD_3";
'd2:code_state = "SHIFT";
'd3:code_state = "ASCII";
'd4:code_state = "WAIT_LCD";
default:code_state = "ERROR";
endcase
end endmodule
分别看看显示编码模块仿真波形的整体和局部放大图:

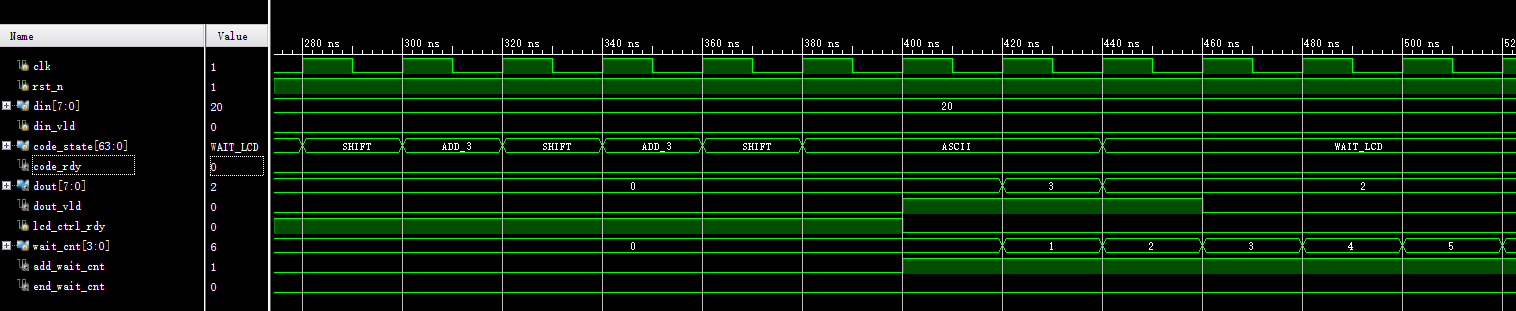
可以看出在LCD控制模块准备好情况下(lcd_ctrl_rdy拉高),显示编码模块也处于准备就绪状态,上游模块送入待转码数据8'h20,对应的十进制数是32,显示编码模块输出结果与数值相符合。
FPGA加三移位算法:硬件逻辑实现二进制转BCD码的更多相关文章
- FPGA中将十进制数在数码管中显示(verilog版)--二进制转换为BCD码
这周有朋友问怎样在fpga中用数码管来显示一个十进制数,比如1000.每个数码管上显示一位十进制数.如果用高级语言来分离各位,只需要分别对该数做1000,100,10对应的取商和取余即可分离出千百十个 ...
- 基于FPGA的腐蚀膨胀算法实现
本篇文章我要写的是基于的腐蚀膨胀算法实现,腐蚀膨胀是形态学图像处理的基础,,腐蚀在二值图像的基础上做"收缩"或"细化"操作,膨胀在二值图像的基础上做" ...
- 基于FPGA的肤色识别算法实现
大家好,给大家介绍一下,这是基于FPGA的肤色识别算法实现. 我们今天这篇文章有两个内容一是实现基于FPGA的彩色图片转灰度实现,然后在这个基础上实现基于FPGA的肤色检测算法实现. 将彩色图像转化为 ...
- 目标反射回波检测算法及其FPGA实现 之一:算法概述
目标反射回波检测算法及其FPGA实现之一:算法概述 前段时间,接触了一个声呐目标反射回波检测的项目.声呐接收机要实现的核心功能是在含有大量噪声的反射回波中,识别出发射机发出的激励信号的回波.我会分几篇 ...
- Java利用DES/3DES/AES这三种算法分别实现对称加密
转载地址:http://blog.csdn.net/smartbetter/article/details/54017759 有两句话是这么说的: 1)算法和数据结构就是编程的一个重要部分,你若失掉了 ...
- 二进制 转换成十进制 BCD码(加3移位法)
"原来的二进制数十几位,则左移时就要左移几位" "二进制数调整BCD码的方法是将二进制码左移8次,每次移位后都检查低四位LSD+3是否大于7,如是则加3,否则不加,高4位 ...
- 分类算法之逻辑回归(Logistic Regression
分类算法之逻辑回归(Logistic Regression) 1.二分类问题 现在有一家医院,想要对病人的病情进行分析,其中有一项就是关于良性\恶性肿瘤的判断,现在有一批数据集是关于肿瘤大小的,任务就 ...
- 分布式共识算法 (三) Raft算法
系列目录 分布式共识算法 (一) 背景 分布式共识算法 (二) Paxos算法 分布式共识算法 (三) Raft算法 分布式共识算法 (四) BTF算法 一.引子 1.1 介绍 Raft 是一种为了管 ...
- SparkMLlib学习分类算法之逻辑回归算法
SparkMLlib学习分类算法之逻辑回归算法 (一),逻辑回归算法的概念(参考网址:http://blog.csdn.net/sinat_33761963/article/details/51693 ...
随机推荐
- 某控股公司OA系统ORACLE DG搭建
*此处安装ORACLE DATAGUARD是利用ORACLE RMAN DUPLICATE方式安装.*可以搭建好ORACLE DG再来impdp生产数据,也可以先导入主库数据再来做DG*注意看下面的配 ...
- EntityFrameWork实现部分字段获取和修改(含源码)
EntityFrameWork类库,是微软推出的ORM组件,它是基于Ado.Net的,个人感觉还是非常 好用的.以下介绍的2个功能点分别是部分字段更新和获取 解决部分字段Update.本方案采用仓储模 ...
- CodeFirst+MySQL+.Net Core配置详情
EF 基础操作:http://www.cnblogs.com/M-LittleBird/p/5852395.html 一.使用CodeFirst模式 1.在需要添加的项目上右键点击选择添加ADD.NE ...
- @Scope注解
@Scope(value=ConfigurableBeanFactory.SCOPE_PROTOTYPE)这个是说在每次注入的时候回自动创建一个新的bean实例 @Scope(value=Config ...
- Jquery那些坑
今天写Jquery的时候突然发现在将$("<td><td/>").appendTo(someElement)的时候发现一下子多出来两个,甚是奇怪,检查后端和 ...
- Java进阶之路——从初级程序员到架构师,从小工到专家
原创文章 怎样学习才能从一名Java初级程序员成长为一名合格的架构师,或者说一名合格的架构师应该有怎样的技术知识体系,这是不仅一个刚刚踏入职场的初级程序员也是工作三五年之后开始迷茫的老程序员经常会问到 ...
- Docker镜像的构成__Dockerfile
相比docker commit来说,Dockerfile的方法会更加自动化,更加方便快捷,而且功能也更强大.拿构建Nginx容器举例. 先创建一个目录 mkdir /opt/docker-file 进 ...
- Mysql基准测试详细解说(根据慕课网:《打造扛得住Mysql数据库架构》视频课程实时笔录)
什么是基准测试 基准测试是一种测量和评估软件性能指标的活动用于建立某个时刻的性能基准,以便当系统发生软硬件变化时重新进行基准测试以及评估变化对性能的影响. 我们可以这样认为:基准测试是针对系统设置的一 ...
- PAT1116. Come on! Let's C (map)
思路:模拟一下就好了,map用来记录每个人的排名. AC代码 #include <stdio.h> #include <map> #include <math.h> ...
- C. Vasya and String
原题链接 C. Vasya and String High school student Vasya got a string of length n as a birthday present. T ...