poj 1265 Area(Pick定理)
| Time Limit: 1000MS | Memory Limit: 10000K | |
| Total Submissions: 5666 | Accepted: 2533 |
Description
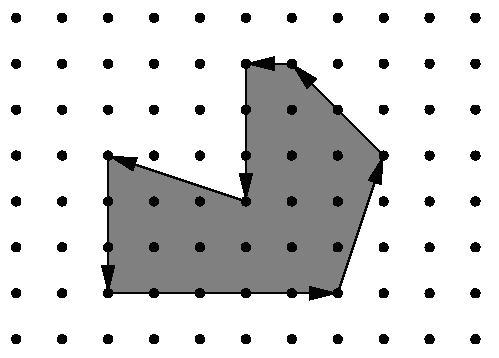
Figure 1: Example area.
You are hired to write a program that calculates the area occupied
by the new facility from the movements of a robot along its walls. You
can assume that this area is a polygon with corners on a rectangular
grid. However, your boss insists that you use a formula he is so proud
to have found somewhere. The formula relates the number I of grid points
inside the polygon, the number E of grid points on the edges, and the
total area A of the polygon. Unfortunately, you have lost the sheet on
which he had written down that simple formula for you, so your first
task is to find the formula yourself.
Input
For each scenario, you are given the number m, 3 <= m < 100,
of movements of the robot in the first line. The following m lines
contain pairs 揹x dy�of integers, separated by a single blank, satisfying
.-100 <= dx, dy <= 100 and (dx, dy) != (0, 0). Such a pair means
that the robot moves on to a grid point dx units to the right and dy
units upwards on the grid (with respect to the current position). You
can assume that the curve along which the robot moves is closed and that
it does not intersect or even touch itself except for the start and end
points. The robot moves anti-clockwise around the building, so the area
to be calculated lies to the left of the curve. It is known in advance
that the whole polygon would fit into a square on the grid with a side
length of 100 units.
Output
output for every scenario begins with a line containing 揝cenario #i:�
where i is the number of the scenario starting at 1. Then print a single
line containing I, E, and A, the area A rounded to one digit after the
decimal point. Separate the three numbers by two single blanks.
Terminate the output for the scenario with a blank line.
Sample Input
2
4
1 0
0 1
-1 0
0 -1
7
5 0
1 3
-2 2
-1 0
0 -3
-3 1
0 -3
Sample Output
Scenario #1:
0 4 1.0 Scenario #2:
12 16 19.0
Source
【思路】
Pick定理
同上题。
【代码】
#include<cstdio>
using namespace std; struct Pt {
int x,y;
Pt(int x=,int y=) :x(x),y(y){};
};
Pt p[];
typedef Pt vec;
vec operator - (Pt a,Pt b) { return vec(a.x-b.x,a.y-b.y); } int abs(int x) { return x<? -x:x; }
int gcd(int a,int b) { return b==? a:gcd(b,a%b); }
int cross(Pt a,Pt b) { return a.x*b.y-a.y*b.x; }
int calc(Pt a,Pt b) { return gcd(abs(a.x-b.x),abs(a.y-b.y)); } int n;
int main() {
int T,kase=;
scanf("%d",&T);
while(T--) {
scanf("%d",&n);
n++;
p[]=Pt(,);
for(int i=;i<n;i++) {
scanf("%d%d",&p[i].x,&p[i].y);
p[i].x+=p[i-].x , p[i].y+=p[i-].y;
}
int S=,b=;
for(int i=;i<n-;i++) {
S += cross(p[i],p[i+]);
b += calc(p[i],p[i+]);
}
b += calc(p[n-],p[])+calc(p[],p[]);
printf("Scenario #%d:\n%d %d %.1f\n\n",++kase,(S-b+)/,b,0.5*S);
}
return ;
}
poj 1265 Area(Pick定理)的更多相关文章
- poj 1265 Area (Pick定理+求面积)
链接:http://poj.org/problem?id=1265 Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: ...
- POJ 1265 Area (Pick定理 & 多边形面积)
题目链接:POJ 1265 Problem Description Being well known for its highly innovative products, Merck would d ...
- poj 1265 Area(pick定理)
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 4373 Accepted: 1983 Description Bein ...
- [poj 1265]Area[Pick定理][三角剖分]
题意: 给出机器人移动的向量, 计算包围区域的内部整点, 边上整点, 面积. 思路: 面积是用三角剖分, 边上整点与GCD有关, 内部整点套用Pick定理. S = I + E / 2 - 1 I 为 ...
- poj 1265 Area( pick 定理 )
题目:http://poj.org/problem?id=1265 题意:已知机器人行走步数及每一步的坐标 变化量 ,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:1.以 ...
- Area - POJ 1265(pick定理求格点数+求多边形面积)
题目大意:以原点为起点然后每次增加一个x,y的值,求出来最后在多边形边上的点有多少个,内部的点有多少个,多边形的面积是多少. 分析: 1.以格子点为顶点的线段,覆盖的点的个数为GCD(dx,dy),其 ...
- poj 1265 Area 面积+多边形内点数
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5861 Accepted: 2612 Description ...
- POJ 1265 Area POJ 2954 Triangle Pick定理
Area Time Limit: 1000MS Memory Limit: 10000K Total Submissions: 5227 Accepted: 2342 Description ...
- POJ 1265 Area (pick定理)
题目大意:已知机器人行走步数及每一步的坐标变化量,求机器人所走路径围成的多边形的面积.多边形边上和内部的点的数量. 思路:叉积求面积,pick定理求点. pick定理:面积=内部点数+边上点数/2-1 ...
随机推荐
- MFC设置对话框透明背景
在对话框初始化函数OnInitDialog函数中添加如下代码: SetWindowLong(GetSafeHwnd(),GWL_EXSTYLE,GetWindowLong(GetSafeHwnd(), ...
- left join, right join , inner join, join, union的意义
数据库在连接两张或以上的表来返回数据时,都会生成一张中间的临时表,然后再将临时表返回给用户left join,right join,inner join, join 与 on 配合用 select c ...
- Windows(Vertrigo)下Apache与Tomcat的整合
为了实现整合,上网找了很多资料!尝试了很多次,终于成功整合了!下面我就把整合过程分享给大家,希望能给以后有需要的人提供帮助. 准备工作: 1.VertrigoServ 2.23 下载地址: http ...
- CocoaPods简单使用
CocoaPods的原理 CocoaPods的原理是将所有的依赖库都放到另一个名为Pods的项目中,然后让主项目依赖Pods项目,这样,源码管理工作都从主项目移到了Pods项目中.Pods项目最终会编 ...
- 三菱plc输出指示灯不亮怎么办(转载)
三菱plc输出指示灯不亮怎么办?三菱plc输出指示灯故障 时间:2015-10-21 07:31:12编辑:电工栏目:三菱plc 导读:三菱plc输出指示灯不亮故障的原因,三菱plc在使用中出现输出指 ...
- C++引用作为函数的参数
引用也可以作为一个函数的参数,如:我们定义交换两个数的函数swap,将函数的参数定义成引用的形式: void swap(int &p1, int &p2) //此处函数的形参都是引用 ...
- [JavaScript] js 迅雷评分效果
<!DOCTYPE html PUBLIC "-//W3C//DTD XHTML 1.0 Transitional//EN" "http://www ...
- 网络安装CentOS 5.3
转自网络安装CentOS 5.3 0. 基本要求 (1) 需要使用至少两台服务器:其中一台没有操作系统,是我们即将安装的服务器;另外一台是已经安装好操作系统的服务器,我们用来存储CentOS的安装文件 ...
- Spring 自动装配
1.自动装配有 bytype 和byName两种模式. 2.可以使用autowire属性指定自动装配的方式,byName根据bean的名称和当前bean的setter风格属性进行自动装配:byType ...
- 移动应用产品开发-android开发(三)
历时一个多月的时间,这款APP算是开发完成了,最近在测试完善中,比较空闲好好总结下. 之前两次已经提到开发过程中的主要的知识点,这次主要总结下解决问题方法,http请求和安全. 首先讲下解决问题的方法 ...