最近一年语义SLAM有哪些代表性工作?
点击“计算机视觉life”关注,置顶更快接收消息!
本文由作者刘骁授权发布,转载请联系原作者,个人主页http://www.liuxiao.org
目前 Semantic SLAM (注意不是 Semantic Mapping)工作还比较初步,可能很多思路还没有打开,但可以预见未来几年工作会越来越多。语义 SLAM 的难点在于怎样设计误差函数,将 Deep Learning 的检测或者分割结果作为一个观测,融入 SLAM 的优化问题中一起联合优化,同时还要尽可能做到至少 GPU 实时。
下面是一些有代表性的文章,提供下载和简单思路的理解,但个人精力、能力有限也欢迎大家随时提供更多更好的文章。
1、《Probabilistic Data Association for Semantic SLAM》 ICRA 2017
语义 SLAM 中的概率数据融合,感觉应该算开山鼻祖的一篇了。这篇也获得了 ICRA 2017 年的 Best Paper,可见工作是比较早有创新性的。文章中引入了 EM 估计来把语义 SLAM 转换成概率问题,优化目标仍然是熟悉的重投影误差。这篇文章只用了 DPM 这种传统方法做检测没有用流行的深度学习的检测网络依然取得了一定的效果。当然其文章中有很多比较强的假设,比如物体的三维中心投影过来应该是接近检测网络的中心,这一假设实际中并不容易满足。不过依然不能掩盖其在数学上开创性的思想。
文章下载:probabilistic-data-association-for-semantic-slam
2、《VSO: Visual Semantic Odometry》 ECCV 2018
既然检测可以融合,把分割结果融合当然是再自然不过的想法,而且直观看来分割有更加细粒度的对物体的划分对于 SLAM 这种需要精确几何约束的问题是更加合适的。ETH 的这篇文章紧随其后投到了今年的 ECCV 2018。这篇文章依然使用 EM 估计,在上一篇的基础上使用距离变换将分割结果的边缘作为约束,同时依然利用投影误差构造约束条件。在 ORB SLAM2 和 PhotoBundle 上做了验证取得了一定效果。这篇文章引入距离变换的思路比较直观,很多人可能都能想到,不过能够做 work 以及做了很多细节上的尝试,依然是非常不容易的。但仍然存在一个问题是,分割的边缘并不代表是物体几何上的边缘,不同的视角这一分割边缘也是不停变化的,因此这一假设也不是非常合理。
文章下载:vso-visual-semantic-odometry
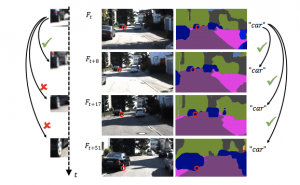
3、《Stereo Vision-based Semantic 3D Object and Ego-motion Tracking for Autonomous Driving》 ECCV 2018
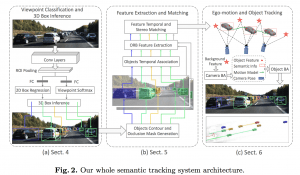
港科大沈邵劼老师团队的最新文章,他们的 VINS 在 VIO 领域具有很不错的开创性成果。现在他们切入自动驾驶领域做了这篇双目语义3D物体跟踪的工作,效果还是很不错的。在沈老师看来,SLAM 是一个多传感器融合的框架,RGB、激光、语义、IMU、码盘等等都是不同的观测,所以只要是解决关于定位的问题,SLAM 的框架都是一样适用的。在这篇文章中,他们将不同物体看成不同的 Map,一边重建一边跟踪。使用的跟踪方法仍然是传统的 Local Feature,而 VIO 作为世界坐标系的运动估计。语义融合方面,他们构造了4个优化项:
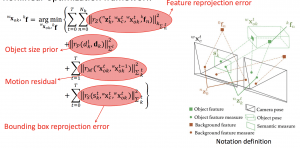
最终取得了很好的效果。
演示地址:https://www.youtube.com/watch?v=5_tXtanePdQ
文章下载:stereo-vision-based-semantic-3d-object-and-ego-motion-tracking-for-autonomous-driving
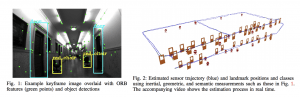
4、《Long-term Visual Localization using Semantically Segmented Images》ICRA 2018
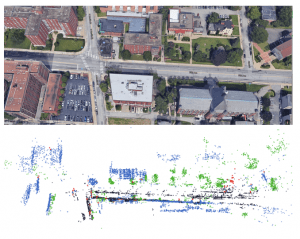
这篇论文讲得比较有意思,它不是一个完整的SLAM系统,不能解决Mapping的问题。它解决的问题是,当我已经有了一个很好的3D地图后,我用这个地图怎么来定位。在传统方法中,我们的定位也是基于特征匹配的,要么匹配 Local Feature 要么匹配线、边等等几何特征。而我们看人在定位时的思维,其实人看不到这么细节的特征的,通常人是从物体级别去定位,比如我的位置东边是某某大楼,西边有个学校,前边有个公交车,我自己在公交站牌的旁边这种方式。当你把你的位置这样描述出来的时候,如果我自己知道你说的这些东西在地图上的位置,我就可以基本确定你在什么地方了。这篇文章就有一点这种意思在里边,不过它用的观测结果是分割,用的定位方法是粒子滤波。它的地图是三维点云和点云上每个点的物体分类。利用这样语义级别的约束,它仍然达到了很好的定位效果。可想而知这样的方法有一定的优点,比如语义比局部特征稳定等;当然也有缺点,你的观测中的语义信息要比较丰富,如果场景中你只能偶尔分割出一两个物体,那是没有办法work的。
演示地址:https://www.youtube.com/watch?v=M55qTuoUPw0
文章下载:long-term-visual-localization-using-semantically-segmented-images
推荐阅读
从零开始一起学习SLAM | 为什么要学SLAM?
从零开始一起学习SLAM | 学习SLAM到底需要学什么?
从零开始一起学习SLAM | SLAM有什么用?
从零开始一起学习SLAM | C++新特性要不要学?
从零开始一起学习SLAM | 为什么要用齐次坐标?
从零开始一起学习SLAM | 三维空间刚体的旋转
从零开始一起学习SLAM | 为啥需要李群与李代数?
从零开始一起学习SLAM | 相机成像模型
从零开始一起学习SLAM | 不推公式,如何真正理解对极约束?
从零开始一起学习SLAM | 神奇的单应矩阵
从零开始一起学习SLAM | 你好,点云
从零开始一起学习SLAM | 给点云加个滤网
从零开始一起学习SLAM | 点云平滑法线估计
零基础小白,如何入门计算机视觉?
SLAM领域牛人、牛实验室、牛研究成果梳理
我用MATLAB撸了一个2D LiDAR SLAM
可视化理解四元数,愿你不再掉头发https://mp.weixin.qq.com/s?__biz=MzIxOTczOTM4NA==&mid=2247485009&idx=2&sn=3709bcff8efb4a3d1ff78fbb60d4f245&chksm=97d7e3c6a0a06ad07bfcebd0e17a9d58c821ddfc2016dc4b8914bc0c921d65b59243ed5efcc9&scene=21#wechat_redirect)
"欢迎关注公众号:计算机视觉life,一起探索计算机视觉新世界~"
最近一年语义SLAM有哪些代表性工作?的更多相关文章
- 分享| 语义SLAM的未来与思考(泡泡机器人)
相比典型的点云地图,语义地图能够很好的表示出机器人到的地方是什么,机器人“看”到的东西是什么.比如进入到一个房间,点云地图中,机器人并不能识别显示出来的一块块的点云到底是什么,但是语义地图的构建可以分 ...
- 语义SLAM研究现状总结
博客转载自:https://blog.csdn.net/xiaoxiaowenqiang/article/details/81051010 原文标题:深度学习结合SLAM 语义slam 语义分割 端到 ...
- 语义SLAM的数据关联和语义定位(一)
语义SLAM和多传感器融合是自动驾驶建图和定位部分比较热门的两种技术.语义SLAM中,语义信息的数据关联相较于特征点的数据关联有所不同.我们一般用特征描述子的相似性来匹配和关联不同图像中的特征点.特征 ...
- 语义slam用于高精地图和高精定位的一些想法
最近一直在考虑语义slam在自动驾驶和辅助驾驶中的用法,研究了一下视觉为主的高精度地图+高精定位的模式,特别是mobileye的REM. 秉承先建图再定位的思路,在服务器端(云端)建图,在车端定位. ...
- 三维重建5:场景中语义分析/语义SLAM/DCNN-大尺度SLAM
前言: 在实时/非实时大规模三维场景重建中,引入了语义SLAM这个概念,参考三维重建:SLAM的尺度和方法论问题和三维重建:SLAM的粒度和工程化问题 .大规模三维场景重建的尺度增大,因此相对于整个重 ...
- 从5个经典工作开始看语义SLAM
本文试图概括Semantic SLAM的主要思路和近年工作,⻓期更新.但因水平有限,若有错漏,感谢指正. (更好的公式显示效果,可关注文章底部的公众号) Semantic SLAM 简介 至今为止,主 ...
- 语义SLAM的数据关联和语义定位(三)
与现有方法的异同 特征点SLAM中的数据关联 先回忆一下特征点SLAM中,我们是如何处理数据关联的.下面以ORBSLAM为例. 在初始化部分,我们通过特征描述子的相似性,建立两帧之间的特征点关联,然后 ...
- 语义SLAM的数据关联和语义定位(四)多目标测量概率模型
多目标模型 这部分想讲一下Semantic Localization Via the Matrix Permanent这篇文章的多目标测量概率模型.考虑到实际情况中,目标检测算法从单张图像中可能检测出 ...
- 语义SLAM的数据关联和语义定位(二)Semantic Localization Via the Matrix Permanent
论文假设和单目标模型 这部分想讲一下Semantic Localization Via the Matrix Permanent这篇文章的一些假设. 待求解的问题可以描述为 假设从姿态\(x\)看到的 ...
随机推荐
- PHP通过经纬坐标计算两个地址的距离
<?php /** *求两个已知经纬度之间的距离,单位为米 * *@param lng1,lng2 经度 * *@param lat1,lat2 纬度 * *@return float 距离,单 ...
- Java变成遇到的简单乱码问题
1.乱码 --- 编码集 编码集的本质是让数字与字符产生一个映射关系,不同的编码集映射实现也不同 比如UTF-8: "中"----> -28 -72 -83 对应 ...
- 正则表达示 for Python3
前情提要 从大量的文字内容中找到自己想要的东西,正则似乎是最好的方法.也是写爬虫不可缺少的技能.所以,别墨迹了赶紧好好学吧! 教程来自http://www.runoob.com/python3/pyt ...
- Python练手例子(14)
79.字符串排序. #python3.7 if __name__ == '__main__': str1 = input('Input string:\n') str2 = input('Input ...
- NET Core微服务之路:基于Ocelot的API网关Relay实现--RPC篇
前言 我们都知道,API网关是工作在应用层上网关程序,为何要这样设计呢,而不是将网关程序直接工作在传输层.或者网络层等等更底层的环境呢?让我们先来简单的了解一下TCP/IP的五层模型. (图片 ...
- XML如何添加注释?
注释以 <!-- 开始并以 --> 结束, 例如 <!--注释内容-->. 注释可以出现在文档序言中,包括文档类型定义 (DTD):文档之后:或文本内容中. 注释不能出现在属性 ...
- 微信小程序没有返回按钮怎么办?微信小程序左上角返回按钮怎么调出来?
如果你发现自己的小程序页面没有返回按钮,请检查是不是用的wx.redirectTo(OBJECT)进行的跳转,如果是那就把它改成wx.navigateTo(OBJECT)就可以了. wx.naviga ...
- 如何利用GitHub搜索敏感信息
如何利用GitHub搜索敏感信息 背景: 最近总是能听到同事说在GitHub上搜到某个敏感信息,然后利用该信息成功的检测并发现某个漏洞,最后提交到对应的SRC(安全应急响应中心)换点money.顿时心 ...
- Android 音视频开发(七): 音视频录制流程总结
在前面我们学习和使用了AudioRecord.AudioTrack.Camera.MediaExtractor.MediaMuxer API.MediaCodec. 学习和使用了上述的API之后,相信 ...
- #Java学习之路——基础阶段(第四篇)
我的学习阶段是跟着CZBK黑马的双源课程,学习目标以及博客是为了审查自己的学习情况,毕竟看一遍,敲一遍,和自己归纳总结一遍有着很大的区别,在此期间我会参杂Java疯狂讲义(第四版)里面的内容. 前言: ...