DOA——MUSIC算法
一、均匀圆阵(UCA, Uniform Circular Array)的MUSIC算法
假设一个半径为R的M元均匀圆阵的所有阵元均位于坐标系X-Y平面内,第k-1个阵元坐标为 ,第i个窄带信号波长为
,第i个窄带信号波长为 ,来波方向为
,来波方向为 ,如图1,则第k-1个阵元到圆心(即原点)的波程差
,如图1,则第k-1个阵元到圆心(即原点)的波程差 为:
为:

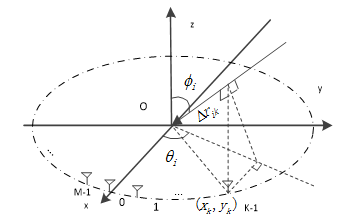
均匀圆阵
存在P个入射信号均匀圆阵的接收模型可表示为:
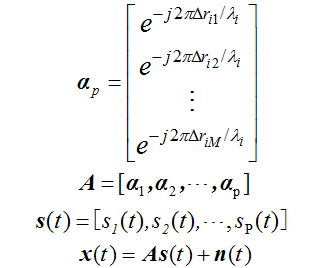
其他步骤与基于ULA的MUSIC算法一致。
令任意两阵元间的波程差 为:
为:

当 时,即产生相位模糊。将均匀圆阵各阵元投影到入射方向,得到一个随入射方向变动的非均匀线阵。需要保证在任意入射方向上投影出的非均匀线阵,其最小间隔总是小于信号波长,模糊谱峰对测向结果影响较小,即:
时,即产生相位模糊。将均匀圆阵各阵元投影到入射方向,得到一个随入射方向变动的非均匀线阵。需要保证在任意入射方向上投影出的非均匀线阵,其最小间隔总是小于信号波长,模糊谱峰对测向结果影响较小,即:

在方向角相同时,水平入射( )信号的波程差最长,且投影出的非均匀线阵随方向角不同周期变化,因此只需要讨论水平入射信号对应投影线阵的不同情况。
)信号的波程差最长,且投影出的非均匀线阵随方向角不同周期变化,因此只需要讨论水平入射信号对应投影线阵的不同情况。
在MUSIC算法中,阵元的最小间隔越大模糊谱峰峰值就越大。但在均匀圆阵中,阵元间隔随着入射波方向变化,因此算法性能受到最小间隔最大值的影响。根据来波方向不同,入射方向上的第k个阵元投影间隔分别为:
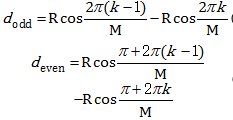
当M为奇数时,对着阵元入射,投影点重合为${\rm{(M + 1)/2}}$个;当M为偶数时,对着相邻阵元连线中点入射,投影点重合为M/2个,此时投影线阵的非零最小间隔的值最大,且取得该最大值k=1时。进一步可求得半径的选取关系:
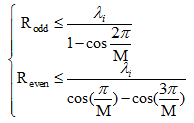
选取半径时,按上式等比例缩放,即能使对应的奇数阵与偶数阵有近似的抗相位模糊的性能。
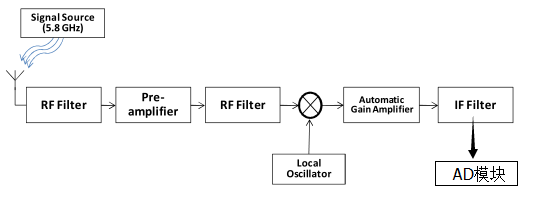
每一路接收的结构图:
二、MUSIC
1、
clear all;
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsym=500;%符号个数
Fsym=1;%符号速率
M=3;%一个符号对应的比特数
Fbit=M*Fsym;%比特速率
Nsour=3;%信源数
Angle=[5,15,35];%信源的来波方向
Fc=10;%载波频率
Fs=100;%抽样频率
R=0.5;%滚降因子
Del=5;%群延迟因子
% Nsamp=50;%采样点数或者快拍数
S1=randint(Nsym,1,2^M);
S2=randint(Nsym,1,2^M);
S3=randint(Nsym,1,2^M);
PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);
PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);
PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);
Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos1=0.99*Rcos11+Rcos21+1.02*Rcos31;%构造相干信源--信源1、信源2与信源3
Rcos2=Rcos11+Rcos21+Rcos31;%构造相干信源--信源1、信源2与信源3
Rcos3=Rcos11+1.03*Rcos21+1.05*Rcos31;%构造相干信源--信源1、信源2与信源3
save xyc3 Rcos1 Rcos2 Rcos3
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsamp=1024;%采样点数或者快拍数
i=sqrt(-1);
j=i;
Ntx=8;%阵列数
SNR=[2,2,2];%三信源的信噪比
% sn=10; %----单信号源
Lamda=2;%信号波长
D=Lamda/2;%线性阵列的距离
p=3;%子阵个数
L=Ntx-p+1;%子阵阵元数
nr=randn(Ntx,Nsamp);
ni=randn(Ntx,Nsamp);
n=nr+j*ni;%产生背景噪声
load xyc3;
t=1:Nsamp;
% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源
s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数
ps=diag((s1*s1')/Nsamp);%无噪声信号功率--%矩阵维数=信源数*1
delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1
% delta1=ps./(2*10.^(sn/10)); %----单信号源
delta2=diag(delta1);%矩阵维数=1*1
delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1
Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数
%计算各信源SNR比条件下,阵列接收到的信号幅度%
Pn=zeros(Nsamp,1);
pn=zeros(Ntx,Nsamp);
Pn=diag(n'*n);
for h=1:Nsamp
pn(:,h)=n(:,h)./sqrt(Pn(h,:));
end
Rev_n=pn;
%计算各阵列接收到的背景噪声下的信号幅度%
tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数
% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源
tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1
tmp4=[0:L-1]';%子矩阵维数=子矩阵阵元数*1
a1=tmp1*tmp;%矩阵维数=阵元数*信源数
A=exp(a1);%方向矩阵--%矩阵维数=阵元数*信源数
X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数
Rxx=(X*X')/Nsamp;
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间平滑算法%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
sub_FRxx=zeros(L,L);
sub_BRxx=zeros(L,L);
for i=1:p
sub_FR=zeros(L,Nsamp);
sub_BR=zeros(L,Nsamp);
sub_FR=X(i:1:i+L-1,:);
last=Ntx+1-i;
first=last-L+1;
sub_BR=conj(X(last:-1:first,:));
sub_FRxx=sub_FRxx+((sub_FR*sub_FR')./Nsamp);
sub_BRxx=sub_BRxx+((sub_BR*sub_BR')./Nsamp);
end
sub_FRxx=sub_FRxx./p;
sub_BRxx=sub_BRxx./p;
sub_Rxx=(sub_FRxx+sub_BRxx)./2;
[VFB,HFB]=eig(sub_Rxx);
[HFB,IFB]=sort(diag(HFB),1);
VFB=VFB(:,IFB);
VnFB=VFB(:,1:L-Nsour);
VsFB=VFB(:,L-Nsour+1:L);
%%%%%%%%%%%%%%%%%%%%%%%%%%%%空间平滑算法%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
ScanAng=[-90:1:90];
for i=1:length(ScanAng)
tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;
tmp3=tmp2*tmp1;
tmp5=tmp2*tmp4;
A_Sita=exp(tmp3);
Sub_Sita=exp(tmp5);
Sub_FBsita(i)=(Sub_Sita'*Sub_Sita)/(Sub_Sita'*VnFB*VnFB'*Sub_Sita);
end
figure(1);
semilogy(ScanAng,real(Sub_FBsita),'bo-');
axis([-60 60 0.1 1e7]);
xlabel('M_Angle(deg)');
ylabel('M_Spectrum');
grid on
2、
clear all;
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsym=500;%符号个数
Fsym=1;%符号速率
M=3;%一个符号对应的比特数
Fbit=M*Fsym;%比特速率
Nsour=3;%信源数
Angle=[10,40,80];%信源的来波方向
Fc=10;%载波频率
Fs=100;%抽样频率
R=0.5;%滚降因子
Del=5;%群延迟因子
% Nsamp=50;%采样点数或者快拍数
S1=randint(Nsym,1,2^M);
S2=randint(Nsym,1,2^M);
S3=randint(Nsym,1,2^M);
PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);
PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);
PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);
Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos1=Rcos11;%构造相干信源--信源1、信源2与信源3
Rcos2=Rcos21;%构造相干信源--信源1、信源2与信源3
Rcos3=Rcos31;%构造相干信源--信源1、信源2与信源3
save xyc3 Rcos1 Rcos2 Rcos3
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsamp=1024;%采样点数或者快拍数
i=sqrt(-1);
j=i;
Ntx=8;%阵列数
SNR=[10,10,10];%三信源的信噪比
% sn=10; %----单信号源
Lamda=2;%信号波长
D=Lamda/2;%线性阵列的距离
p=3;%子阵个数
L=Ntx-p+1;%子阵阵元数
nr=randn(Ntx,Nsamp);
ni=randn(Ntx,Nsamp);
n=nr+j*ni;%产生背景噪声
load xyc3;
t=1:Nsamp;
% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源
s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数
ps=diag((s1*s1')/Nsamp);%无噪声信号功率--%矩阵维数=信源数*1
delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1
% delta1=ps./(2*10.^(sn/10)); %----单信号源
delta2=diag(delta1);%矩阵维数=1*1
delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1
Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数
%计算各信源SNR比条件下,阵列接收到的信号幅度%
Pn=zeros(Nsamp,1);
pn=zeros(Ntx,Nsamp);
Pn=diag(n'*n);
for h=1:Nsamp
pn(:,h)=n(:,h)./sqrt(Pn(h,:));
end
Rev_n=pn;
%计算各阵列接收到的背景噪声下的信号幅度%
tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数
% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源
tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1
tmp4=[0:L-1]';%子矩阵维数=子矩阵阵元数*1
a1=tmp1*tmp;%矩阵维数=阵元数*信源数
A=exp(a1);%方向矩阵--%矩阵维数=阵元数*信源数
X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数
Rxx=(X*X')/Nsamp;
[V,H]=eig(Rxx);%MUSIC算法---MUltiSIgnal Classification
[H,I]=sort(diag(H),1);%特征值按照升序排列
V=V(:,I);%特征值对应的特征向量也按照相应特征值的升序排列
Vn=V(:,1:Ntx-Nsour);%噪声子空间---协方差的特征向量--最小特征值对应的特征向量
Vs=V(:,Ntx-Nsour+1:Ntx);%信号子空间---协方差的特征向量--最大特征值对应的特征向量
ScanAng=[-90:1:90];
for i=1:length(ScanAng)
tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;
tmp3=tmp2*tmp1;
tmp5=tmp2*tmp4;
A_Sita=exp(tmp3);
MUSIC_Sita(i)=(A_Sita'*A_Sita)/(A_Sita'*Vn*Vn'*A_Sita);
end
figure(1);
semilogy(ScanAng,real(MUSIC_Sita),'g*-');
axis([-90 90 0.1 1e7]);
xlabel('M_Angle(deg)');
ylabel('M_Spectrum');
grid on
3、
clear all;
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsym=500;%符号个数
Fsym=1;%符号速率
M=3;%一个符号对应的比特数
Fbit=M*Fsym;%比特速率
Nsour=3;%信源数
Angle=[5,8,35];%信源的来波方向
Fc=10;%载波频率
Fs=100;%抽样频率
R=0.5;%滚降因子
Del=5;%群延迟因子
% Nsamp=50;%采样点数或者快拍数
S1=randint(Nsym,1,2^M);
S2=randint(Nsym,1,2^M);
S3=randint(Nsym,1,2^M);
PM1=pmmod(S1,Fc,Fs,pi/8,pi/4);
PM2=pmmod(S2,Fc,Fs,pi/8,pi/4);
PM3=pmmod(S3,Fc,Fs,pi/8,pi/4);
Rcos11=rcosflt(PM1,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos21=rcosflt(PM2,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos31=rcosflt(PM3,Fsym,Fs,'fir/sqrt/Fs',R,Del);
Rcos1=0.99*Rcos11+Rcos21+1.02*Rcos31;%构造相干信源--信源1、信源2与信源3
Rcos2=Rcos11+Rcos21+Rcos31;%构造相干信源--信源1、信源2与信源3
Rcos3=Rcos11+1.03*Rcos21+1.05*Rcos31;%构造相干信源--信源1、信源2与信源3
save xyc3 Rcos1 Rcos2 Rcos3
%产生三信源,角度分别为-40°、30°、45°,采用8PSK调制,滚降系数为0.5的平方根升余弦滤波
Nsamp=512;%采样点数或者快拍数
i=sqrt(-1);
j=i;
Ntx=8;%阵列数
SNR=[2,2,2];%三信源的信噪比
% sn=10; %----单信号源
Lamda=2;%信号波长
D=Lamda/2;%线性阵列的距离
p=3;%子阵个数
L=Ntx-p+1;%子阵阵元数
nr=randn(Ntx,Nsamp);
ni=randn(Ntx,Nsamp);
n=nr+j*ni;%产生背景噪声
load xyc3;
t=1:Nsamp;
% s1=[Rcos1(t).'];%接收信号的采样点数%----单信号源
s1=[Rcos1(t).';Rcos2(t).';Rcos3(t).'];%矩阵维数=信源数*抽样点数
ps=diag((s1*s1')/Nsamp);%无噪声信号功率--%矩阵维数=信源数*1
delta1=(1./(2*10.^(SNR/10)))*ps;%矩阵维数=1*1
% delta1=ps./(2*10.^(sn/10)); %----单信号源
delta2=diag(delta1);%矩阵维数=1*1
delta=sqrt(delta2);%噪声幅度值--%矩阵维数=1*1
Rev_s1=(1./delta')*s1;%SNR条件下的信号幅度--%矩阵维数=信源数*抽样点数
%计算各信源SNR比条件下,阵列接收到的信号幅度%
Pn=zeros(Nsamp,1);
pn=zeros(Ntx,Nsamp);
Pn=diag(n'*n);
for h=1:Nsamp
pn(:,h)=n(:,h)./sqrt(Pn(h,:));
end
Rev_n=pn;
%计算各阵列接收到的背景噪声下的信号幅度%
tmp=-j*2*pi*D*sin(Angle*pi/180)/Lamda;%---%矩阵维数=1*信源数
% tmp=-j*2*pi*D*sin(1*pi/180)/Lamda; %----单信号源
tmp1=[0:Ntx-1]';%矩阵维数=阵元数*1
tmp4=[0:L-1]';%子矩阵维数=子矩阵阵元数*1
a1=tmp1*tmp;%矩阵维数=阵元数*信源数
A=exp(a1);%方向矩阵--%矩阵维数=阵元数*信源数
X=A*Rev_s1+Rev_n;%阵列接收到的信号幅度--%矩阵维数=阵元数*抽样点数
Rxx=(X*X')/Nsamp;
Rxx_fb=zeros(L,L);
Rxx_f=zeros(L,L);
Rxx_b=zeros(L,L);
J=fliplr(eye(L));
for m=1:p
for k=1:p
Rxx_f=Rxx_f+Rxx(m:1:m+L-1,k:1:k+L-1)*Rxx(k:1:k+L-1,m:1:m+L-1);
Rxx_b=Rxx_b+J*conj(Rxx(m:1:m+L-1,k:1:k+L-1))*conj(Rxx(k:1:k+L-1,m:1:m+L-1))*J;
end
end
Rxx_f=Rxx_f./p;
Rxx_b=Rxx_b./p;
Rxx_fb=(Rxx_f+Rxx_b)./p;
[V_fb,H_fb]=eig(Rxx_fb);%特征分解---MUltiSIgnal Classification
[H_fb,I_fb]=sort(diag(H_fb),1);%特征值按照升序排列
V_fb=V_fb(:,I_fb);%特征值对应的特征向量也按照相应特征值的升序排列
Vn_fb=V_fb(:,1:L-Nsour);
Vs_fb=V_fb(:,L-Nsour+1:L);
ScanAng=[-90:1:90];
for i=1:length(ScanAng)
tmp2=-j*2*pi*D*sin(ScanAng(i)*pi/180)/Lamda;
tmp3=tmp2*tmp1;
tmp5=tmp2*tmp4;
A_Sita=exp(tmp3);
Sub_Sita=exp(tmp5);
fb_sita(i)=(Sub_Sita'*Sub_Sita)/(Sub_Sita'*Vn_fb*Vn_fb'*Sub_Sita);
end
figure(1);
semilogy(ScanAng,real(fb_sita),'r-');
axis([-60 60 0.1 1e7]);
xlabel('M_Angle(deg)');
ylabel('M_Spectrum');
grid on
4、
%=========================================================================
% UCA_multi_in_2D
%
%========================================================================= clc;
clear all;
close all; %------------------------常数表-------------------------------
c = 3e8;
namda = c/18e9;
est_num = 1;
iteration = 100;
sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];
phi = 60; %% ----------------入射信号模型-------------------------------
N_x = 2^5; %快拍点数
F0 = 18e9; %中心频率
B = 20e6; %带宽
Fs = 2*B; %采样频率
Ts = 1/Fs; %采样时间
T = (N_x-1)*Ts; %快拍持续时间
u = B/T; %频率变化率
t = -T/2:Ts:T/2; %时间轴点
l = c/18e9;
st = exp(1j*2*pi*(F0*t+.5*u*t.^2)); dir7 =(46:.25:56)*pi/180; %(-50:.25:-40)*pi/180;
dir8 =(62.5:.25:72.5)*pi/180;
dir9 =(35:.25:45)*pi/180;%(-51:.25:-41)*pi/180;
dir10=(49:.25:59)*pi/180;
ang=(50:.25:70)*pi/180; e_dir7 = zeros(1,length(sr_array));
e_dir8 = zeros(1,length(sr_array));
e_dir9 = zeros(1,length(sr_array));
e_dir10= zeros(1,length(sr_array)); for ss = 1:length(sr_array)
snr = sr_array(ss);
%--------------------7阵元---------------------------------------
sensor_num = 7;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
R = namda/(1-cos(d_angle(2)));
x = R*cos(d_angle);y = R*sin(d_angle); theta = d_angle(2)*180/pi;
for it = 1:iteration
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir7),length(ang));
for i=1:length(dir7)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir7(i))+y*sin(dir7(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
[a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir7(a)*180/pi;
e_dir7(ss) = e_dir7(ss)+(aa-theta)^2;
end %--------------------8阵元-------------------------------------
sensor_num = 8;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
R = namda/(2*sin(d_angle(2))*sin(0.5*d_angle(2)));
x = R*cos(d_angle);y = R*sin(d_angle); theta = 1.5*d_angle(2)*180/pi;
for it = 1:iteration
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir8),length(ang));
for i=1:length(dir8)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir8(i))+y*sin(dir8(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir8(a)*180/pi;
e_dir8(ss) = e_dir8(ss)+(aa-theta)^2;
end %---------------9阵元---------------------------------------------------
sensor_num = 9;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
R = namda/(1-cos(d_angle(2)));
x = R*cos(d_angle);y = R*sin(d_angle); theta = d_angle(2)*180/pi;
for it = 1:iteration
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir9),length(ang));
for i=1:length(dir9)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir9(i))+y*sin(dir9(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
[a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir9(a)*180/pi;
e_dir9(ss) = e_dir9(ss)+(aa-theta)^2;
end %---------------10阵元---------------------------------------------------
sensor_num = 10;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
R = namda/(2*sin(d_angle(2))*sin(0.5*d_angle(2)));
x = R*cos(d_angle);y = R*sin(d_angle); theta = 1.5*d_angle(2)*180/pi;
for it = 1:iteration
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir10),length(ang));
for i=1:length(dir10)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir10(i))+y*sin(dir10(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir10(a)*180/pi;
e_dir10(ss) = e_dir10(ss)+(aa-theta)^2;
end end
figure;
% subplot(121);
% plot(sr_array+45,e_dir10(1,:)/iteration,'-^k',sr_array+45,e_dir9(1,:)/iteration,'-*k');
% legend('8元UCA','9元UCA');
% grid on;%axis([-10,20,-.01,.45]);
% colormap gray;
% xlabel('信噪比/dB');ylabel('均方误差/°');
% title('半径相同精度试验');
%
%
% subplot(122);
plot(sr_array+45,e_dir7/iteration,'-^k',sr_array+45,e_dir8/iteration,'-*k');hold on;
plot(sr_array+45,e_dir9/iteration,'-sk',sr_array+45,e_dir10/iteration,'-dk');
legend('7阵元','8阵元','9阵元','10阵元');
grid on;axis([-5.5,18,-.02,.65]);
colormap gray;
xlabel('信噪比/dB');ylabel('均方误差/°');
title('不同阵元最大半径测向试验');
5、
%=========================================================================
% UCA_multi_in_2D
%
%========================================================================= clc;
clear all;
close all; %------------------------常数表-------------------------------
c = 3e8;
namda = c/18e9;
est_num = 1;
iteration = 100;
sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];
phi = 60; %% ----------------入射信号模型-------------------------------
N_x = 2^5; %快拍点数
F0 = 18e9; %中心频率
B = 20e6; %带宽
Fs = 2*B; %采样频率
Ts = 1/Fs; %采样时间
T = (N_x-1)*Ts; %快拍持续时间
u = B/T; %频率变化率
t = -T/2:Ts:T/2; %时间轴点
l = c/18e9;
st = exp(1j*2*pi*(F0*t+.5*u*t.^2));
R = 0.01;
dir9(1,:)=(-50:.25:-40)*pi/180;
dir9(2,:)=(75:.25:85)*pi/180;
dir10(1,:)=(-51:.25:-41)*pi/180;
dir10(2,:)=(107:.25:117)*pi/180;
ang=(50:.25:70)*pi/180; e_dir9= zeros(2,length(sr_array));
e_ang9= zeros(2,length(sr_array));
e_dir10= zeros(2,length(sr_array));
e_ang10= zeros(2,length(sr_array)); for ss = 1:length(sr_array)
snr = sr_array(ss);
%---------------7阵元---------------------------------------------------
sensor_num = 9;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle);
theta_array = [-9*d_angle(2)/8,d_angle(3)]*180/pi; for it = 1:iteration
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
for dd = 1:2
theta = theta_array(dd);
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l); xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir9(dd,:)),length(ang));
for i=1:length(dir9(dd,:))
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir9(dd,i))+y*sin(dir9(dd,i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir9(dd,a)*180/pi;
bb = ang(b)*180/pi;
e_dir9(dd,ss) = e_dir9(dd,ss)+(aa-theta)^2;
e_ang9(dd,ss) = e_ang9(dd,ss)+(bb-phi)^2;
end
end
%---------------8阵元---------------------------------------------------
sensor_num = 8;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle);
theta_array = [-9*d_angle(2)/8,2.5*d_angle(2)]*180/pi;
for it = 1:iteration for dd = 1:2
theta = theta_array(dd);
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir10(dd,:)),length(ang));
for i=1:length(dir10(dd,:))
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir10(dd,i))+y*sin(dir10(dd,i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir10(dd,a)*180/pi;
bb = ang(b)*180/pi;
e_dir10(dd,ss) = e_dir10(dd,ss)+(aa-theta)^2;
e_ang10(dd,ss) = e_ang10(dd,ss)+(bb-phi)^2;
end
end
end
figure;
subplot(121);
plot(sr_array+45,e_dir9(1,:)/iteration,'-^k',sr_array+45,e_dir9(2,:)/iteration,'-*k');
legend('-9/8 360/M','3 360/M');
grid on;%axis([-10,20,-.01,.45]);
colormap gray;
xlabel('信噪比/dB');ylabel('均方误差/°');
title('9元阵方向角误差');
%
% subplot(222);
% plot(sr_array+45,e_ang9(1,:)/iteration,'-^k',sr_array+45,e_ang9(2,:)/iteration,'-*k');
% legend('-9/8 360/M','3 360/M');
% grid on;axis([-10,20,-.1,1.45]);
% colormap gray;
% xlabel('信噪比/dB');ylabel('均方误差/°');
% title('7元阵俯仰角误差'); subplot(122);
plot(sr_array+45,e_dir10(1,:)/iteration,'-^k',sr_array+45,e_dir10(2,:)/iteration,'-*k');
legend('-5/4 360/M','5/2 360/M');
grid on;%axis([-10,20,-.01,.45]);
colormap gray;
xlabel('信噪比/dB');ylabel('均方误差/°');
title('8元阵方向角误差');
%
%
% subplot(224);
% plot(sr_array+45,e_ang10(1,:)/iteration,'-^k',sr_array+45,e_ang10(2,:)/iteration,'-*k');
% legend('-5/4 360/M','3 360/M');
% grid on;axis([-10,20,-.1,1.45]);
% colormap gray;
% xlabel('信噪比/dB');ylabel('均方误差/°');
% title('8元阵俯仰角误差');
6、
%=========================================================================
% UCA_multi_in_2D
%
%========================================================================= clc;
clear all;
close all; %------------------------常数表-------------------------------
c = 3e8;
namda = c/18e9;
est_num = 1;
iteration = 100;
sr_array = [-50,-47.5,-45,-42.5,-40,-35,-27.5];
phi = 60; %% ----------------入射信号模型-------------------------------
N_x = 2^5; %快拍点数
F0 = 18e9; %中心频率
B = 20e6; %带宽
Fs = 2*B; %采样频率
Ts = 1/Fs; %采样时间
T = (N_x-1)*Ts; %快拍持续时间
u = B/T; %频率变化率
t = -T/2:Ts:T/2; %时间轴点
l = c/18e9;
st = exp(1j*2*pi*(F0*t+.5*u*t.^2)); dir7 =(46:.25:56)*pi/180; %(-50:.25:-40)*pi/180;
dir8 =(62.5:.25:72.5)*pi/180;
dir9 =(35:.25:45)*pi/180;%(-51:.25:-41)*pi/180;
dir10=(49:.25:59)*pi/180;
ang=(50:.25:70)*pi/180; e_dir7 = zeros(1,length(sr_array));
e_dir8 = zeros(1,length(sr_array));
e_dir9 = zeros(1,length(sr_array));
e_dir10= zeros(1,length(sr_array));
R = 0.1; for ss = 1:length(sr_array)
snr = sr_array(ss);
%--------------------7阵元---------------------------------------
sensor_num = 7;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle); theta = d_angle(2)*180/pi;
for it = 1:iteration
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir7),length(ang));
for i=1:length(dir7)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir7(i))+y*sin(dir7(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
[a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir7(a)*180/pi;
e_dir7(ss) = e_dir7(ss)+(aa-theta)^2;
end %--------------------8阵元-------------------------------------
sensor_num = 8;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle); theta = 1.5*d_angle(2)*180/pi;
for it = 1:iteration
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir8),length(ang));
for i=1:length(dir8)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir8(i))+y*sin(dir8(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir8(a)*180/pi;
e_dir8(ss) = e_dir8(ss)+(aa-theta)^2;
end %---------------9阵元---------------------------------------------------
sensor_num = 9;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle); theta = d_angle(2)*180/pi;
for it = 1:iteration
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir9),length(ang));
for i=1:length(dir9)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir9(i))+y*sin(dir9(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
[a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir9(a)*180/pi;
e_dir9(ss) = e_dir9(ss)+(aa-theta)^2;
end %---------------10阵元---------------------------------------------------
sensor_num = 10;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
x = R*cos(d_angle);y = R*sin(d_angle); theta = 1.5*d_angle(2)*180/pi;
for it = 1:iteration
tao = x*(sin(phi*pi/180).*cos(theta*pi/180))+y*(sin(phi*pi/180).*sin(theta*pi/180));
A = exp(-1j*2*pi*tao./l);
n = (randn(sensor_num,N_x)+1j*randn(sensor_num,N_x))/sqrt(2)*sqrt(10^(-45/10));
xt = A*(sqrt(10^(snr/10))*st)+n;
% -------------------2D-MUSIC算法-----------------------
Rxx = xt*xt'/N_x;
[U,S] = svd(Rxx);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_num));
Gn = Un*Un';
Pmusic = zeros(length(dir10),length(ang));
for i=1:length(dir10)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir10(i))+y*sin(dir10(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end [a,b]=find(Pmusic==max(max(Pmusic)));
aa = dir10(a)*180/pi;
e_dir10(ss) = e_dir10(ss)+(aa-theta)^2;
end end
figure; plot(sr_array+45,e_dir7/iteration,'-^k',sr_array+45,e_dir8/iteration,'-*k');hold on;
plot(sr_array+45,e_dir9/iteration,'-sk',sr_array+45,e_dir10/iteration,'-dk');
legend('7阵元','8阵元','9阵元','10阵元');
grid on;axis([-5.5,18,-.02,.25]);
colormap gray;
xlabel('信噪比/dB');ylabel('均方误差/°');
title('不同阵元相同半径测向试验');
7、
%=========================================================================
% Circular Array Classical-Music
%
%========================================================================= clc;
clear all;
close all; c = 3e8;
phi = 60;
namda = c/18e9;
R = 7.5/100;
R = 10/100; snr = -35; %信噪比
N_x = 2^5; %快拍点数
F0 = 18e9; %中心频率
B = 20e6; %带宽
Fs = 40e6; %采样频率
Ts = 1/Fs; %采样时间
T = (N_x-1)*Ts; %快拍持续时间
u = B/T; %频率变化率
t = -T/2:Ts:T/2; %时间轴点
l = c/F0; st = sqrt(10^(snr/10))*exp(1j*2*pi*(F0*t+.5*u*t.^2));
%% -----------------9------------------------
sensor_num = 9;
R = 7.1239/100;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
theta =d_angle(2)*180/pi;
x = R*cos(d_angle);y = R*sin(d_angle); tao = sin(phi*pi/180)*(x*cos(theta*pi/180)+y*sin(theta*pi/180));
A = exp(-1j*2*pi*tao/l);
n = randn(sensor_num,N_x)*sqrt(10^(-45/10));
xt = A*st+n;
% -------------------2D-MUSIC算法-----------------------
Rx = xt*xt'/N_x;
[U,S] = eig(Rx);
est_sour = 1;
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_sour));%*diag([0.05,50,3,1,0.001,1000,777]);
Gn = Un*Un'; dir=(-180:.25:179.8)*pi/180;
ang=(20:.25:91)*pi/180;
Pmusic9 = zeros(length(dir),length(ang)); for i=1:length(dir)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir(i))+y*sin(dir(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic9(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
P_music9 = 10*log10(Pmusic9/min(min(Pmusic9))); %% -----------------9------------------------
sensor_num = 10;
R = 4.5879/100;
%R = 10/100;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
theta =1.6*d_angle(2)*180/pi;
x = R*cos(d_angle);y = R*sin(d_angle); tao = sin(phi*pi/180)*(x*cos(theta*pi/180)+y*sin(theta*pi/180));
A = exp(-1j*2*pi*tao/l);
n = randn(sensor_num,N_x)*sqrt(10^(-45/10));
xt = A*st+n;
% -------------------2D-MUSIC算法-----------------------
Rx = xt*xt'/N_x;
[U,S] = eig(Rx);
disp(est_sour);
[~,index] = sort(diag(S));
Un = U(:,index(1:sensor_num-est_sour));%*diag([0.05,50,3,1,0.001,1000,777]);
Gn = Un*Un'; dir=(-180:.25:179.8)*pi/180;
ang=(20:.25:91)*pi/180;
Pmusic10 = zeros(length(dir),length(ang)); for i=1:length(dir)
for k=1:length(ang)
a_tao = sin(ang(k))*(x*cos(dir(i))+y*sin(dir(i)));
a_theta = exp(-1j*2*pi*a_tao/l);
Pmusic10(i,k)=1./abs((a_theta)'*Gn*a_theta);
end
end
P_music10 = 10*log10(Pmusic10/min(min(Pmusic10))); figure;
% subplot(221);
% [xx,yy] = meshgrid(ang*180/pi,dir*180/pi);
% mesh(xx,yy,P_music9);
% title('9元阵二维空间谱');
% xlabel('俯仰角/°');ylabel('方向角/°');zlabel('空间谱/dB');
% axis([20,91,-180,180,0,24]);%colormap gray; subplot(121);
[xx,yy] = meshgrid(ang*180/pi,dir*180/pi);
mesh(xx,yy,P_music9);
title('9元阵方向角空间谱');
xlabel('俯仰角/°');ylabel('方向角/°');zlabel('空间谱/dB');
axis([20,91,-180,180,0,24]);%colormap gray; % subplot(222);
% [xx,yy] = meshgrid(ang*180/pi,dir*180/pi);
% mesh(xx,yy,P_music10);
% title('10元阵二维空间谱');
% xlabel('俯仰角/°');ylabel('方向角/°');zlabel('空间谱/dB');
% axis([20,91,-180,180,0,24]);%colormap gray; subplot(122);
[xx,yy] = meshgrid(ang*180/pi,dir*180/pi);
mesh(xx,yy,P_music10);
title('10元阵方向角空间谱');
xlabel('俯仰角/°');ylabel('方向角/°');zlabel('空间谱/dB');
axis([20,91,-180,180,0,24]);%colormap gray;
8、
% 波程差图
clear all;
close all;
clc; sensor_num = 9;
c = 3e8;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num;
phi = 90; namda = c/18e9;
if mod(sensor_num,2);
R = namda/(1-cos(d_angle(2)));%相邻最小间距最大值
%R = namda/(cos(floor(sensor_num/4)*d_angle(2))+cos(d_angle(2)*floor((sensor_num+1)/4)-.5));%相邻最大间距最大值
%R = namda/(1+cos(d_angle(2)/2));%任意阵元间距最大
else
R = namda/(2*sin(d_angle(2))*sin(0.5*d_angle(2)));%相邻最小间距最大值
%R = namda/(2*sin(d_angle(2)/2));%相邻最大间距最大值
%R = namda/2;%任意阵元间距最大值
end R = 1; dir = (0:.4:d_angle(2)*180/pi)*pi/180;
%idx=nchoosek(1:sensor_num,2); % 16取2的组合
idx1 = [1,2;2,9;9,3;3,8;8,4;4,7;7,5;5,6];
idx2 = [2,1;1,3;3,9;9,4;4,8;8,5;5,7;7,6];
r = zeros(length(dir),size(idx1,1));
x = R*cos(d_angle);y = R*sin(d_angle);
for i = 1:50
tao = (x*cos(dir(i))*sin(90*pi/180)+y*sin(dir(i))*sin(90*pi/180));
r(i,:) = -diff(tao(idx1),1,2);
end
for i = 51:101
tao = (x*cos(dir(i))*sin(90*pi/180)+y*sin(dir(i))*sin(90*pi/180));
r(i,:) = -diff(tao(idx2),1,2);
end
figure;
subplot(211);
plot(dir(1:5:length(dir))*180/pi,0.234*ones(1,length(dir(1:5:length(dir)))),'.k',dir*180/pi,r(:,end),'-.k',dir*180/pi,r(:,1:end-1),'k');grid on;
legend('0.234','k=1','k=其他');
title('(a)9元阵投影间隔')
xlabel('入射方向\°');ylabel('投影间隔/R');
axis([0,40,-0.01,0.7]); % ---------------------------------------------------------------------
sensor_num = 10;
d_angle = (0:sensor_num-1)'*2*pi/sensor_num; dir = linspace(0,d_angle(2),101);
%idx=nchoosek(1:sensor_num,2); % 16取2的组合
idx1 = [1,2;2,10;10,3;3,9;9,4;4,8;8,5;5,7;7,6];
idx2 = [2,1;1,3;3,10;10,4;4,9;9,5;5,8;8,6;6,7];
r = zeros(length(dir),size(idx1,1));
x = R*cos(d_angle);y = R*sin(d_angle);
for i = 1:50
tao = (x*cos(dir(i))*sin(90*pi/180)+y*sin(dir(i))*sin(90*pi/180));
r(i,:) = -diff(tao(idx1),1,2);
end
for i = 51:101
tao = (x*cos(dir(i))*sin(90*pi/180)+y*sin(dir(i))*sin(90*pi/180));
r(i,:) = -diff(tao(idx2),1,2);
end
subplot(212);
plot(dir(1:5:length(dir))*180/pi,0.3633*ones(1,length(dir(1:5:length(dir)))),'.k',dir*180/pi,r(:,2),'-.k',dir*180/pi,r(:,[1,3:6,7]),'k');grid on;
legend('0.3633','k=1','k=其他');
title('(b)10元阵投影间隔');
xlabel('入射方向/°');ylabel('投影间隔/R');
axis([0,36,-0.01,0.7]);
DOA——MUSIC算法的更多相关文章
- DOA——ESPRIT算法
相位phei = 2*pi*f*d*sind(theta),因此理论上来讲测向的算法都可以用来测频. ESPRIT:Estimating signal parameters viarotational ...
- 基于多重信号分类算法的DOA估计
原创博文,转载请注明出处 下面的论文是我的雷达处理的作业,拿来共享,不喜勿喷.由于公式编辑器的原因,无法复制公式,全部内容请点击. 基于多重信号分类算法的DOA估计 1引言 多重信号分类(MUSIC) ...
- 空间谱专题10:MUSIC算法
作者:桂. 时间:2017-09-19 19:41:40 链接:http://www.cnblogs.com/xingshansi/p/7553746.html 前言 MUSIC(Multiple ...
- Cordic算法简介
作者:桂. 时间:2017-08-14 19:22:26 链接:http://www.cnblogs.com/xingshansi/p/7359940.html 前言 CORDIC算法常用来求解信号 ...
- 宽带DOA估计方法
Wideband DOA Estimation. 语音信号以及野外的车辆信号的声音都是宽带信号,所以传统的窄带DOA算法(MUSIC,ESPRIT等)都不适用.需要采用宽带DOA算法来计算目标信号的波 ...
- 个性化排序算法实践(三)——deepFM算法
FM通过对于每一位特征的隐变量内积来提取特征组合,最后的结果也不错,虽然理论上FM可以对高阶特征组合进行建模,但实际上因为计算复杂度原因,一般都只用到了二阶特征组合.对于高阶特征组合来说,我们很自然想 ...
- B树——算法导论(25)
B树 1. 简介 在之前我们学习了红黑树,今天再学习一种树--B树.它与红黑树有许多类似的地方,比如都是平衡搜索树,但它们在功能和结构上却有较大的差别. 从功能上看,B树是为磁盘或其他存储设备设计的, ...
- 分布式系列文章——Paxos算法原理与推导
Paxos算法在分布式领域具有非常重要的地位.但是Paxos算法有两个比较明显的缺点:1.难以理解 2.工程实现更难. 网上有很多讲解Paxos算法的文章,但是质量参差不齐.看了很多关于Paxos的资 ...
- 【Machine Learning】KNN算法虹膜图片识别
K-近邻算法虹膜图片识别实战 作者:白宁超 2017年1月3日18:26:33 摘要:随着机器学习和深度学习的热潮,各种图书层出不穷.然而多数是基础理论知识介绍,缺乏实现的深入理解.本系列文章是作者结 ...
随机推荐
- 自定义Lisp透明命令
我们知道在CAD中,如果我们在命令前面加一个单引号,则为透明命令.透明命令就是一个命令还没结束,中间插入另一个命令,然后继续完成前一个命令.插入的命令即透明命令,插入透明命令是为了更方便的完成第一个命 ...
- ASP.NET Page执行顺序如:OnPreInit()、OnInit()
http://www.cnblogs.com/yeminglong/archive/2012/10/16/2725664.html 当页面进行回发时,如点击按钮,以上事件都会重新执行一次,这时的执行顺 ...
- pcapng文件的python解析实例以及抓包补遗
为了弥补pcap文件的缺陷,让抓包文件可以容纳更多的信息,pcapng格式应运而生.关于它的介绍详见<PCAP Next Generation Dump File Format> 当前的w ...
- 1z0-052 q209_10
10: A user, who is authenticated externally, logs in to a remote machine and connects to the databas ...
- cordova 强制竖屏
orentation的默认值是default 可使用的值有:default, landscape (横屏), portait (竖屏) orentation可以将设备锁定方向,不受设备旋转影响. 方案 ...
- ORA-14402:更新分区关键字列将导致分区更改(分区表注意)
建立完分区表后一定要和开发确认一点,就是是否会修改分区字段.因为update分区字段到其他分区时候,会报错.解决办法:开启表的行转移功能 alter table XX enable row movem ...
- const对象默觉得文件的局部变量
const 定义的对象为一个常量不能被改动. 这个想必大家都知道. 这里仅仅是介绍const对象默觉得文件的局部变量 当一个非const变量在一个c或cpp文件里为全局时,它在整个程序 ...
- oracle 批量更新表字段
(一) 将数字替换成汉字 第一步,去重查询 使用distinct关键字先对该字段值进行去重查询,看共有几种情况 --查询指定区间内表停诊字段的值 SELECT DISTINCT T.CLOSE_T ...
- CEF 各个版本适应的平台参考表
This Wiki page provides information about CEF branches and instructions for downloading, building an ...
- 小程序四:视图之WXSS
WXSS(WeiXin Style Sheets)是MINA设计的一套样式语言,用于描述WXML的组件样式. WXSS用来决定WXML的组件应该怎么显示. 为了适应广大的前端开发者,我们的WXSS具有 ...