RANSAC 剔除错误匹配 估计模型
随机抽样一致,这个算法,我以前一直都没有理解透彻。只知道可以用来直线拟合,网上大多数中文博客也都是写直线拟合的,但是用来匹配二维特征的时候,总还是没弄明白。
基本概念参考 http://www.cnblogs.com/xrwang/archive/2011/03/09/ransac-1.html
写得已经够清楚了。
现在我来说说它在匹配特征时候的应用。
————————————————————————————————————————————
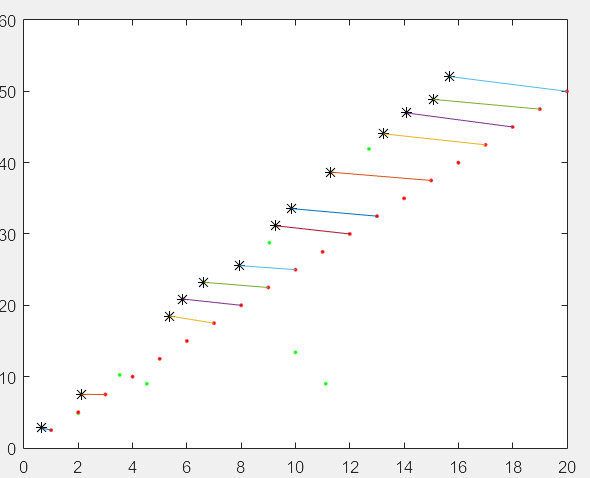
假如我有两组数据,M和T,其中T是由M经过一个旋转和一个平移得来的。
T=R*T+t
R=[cos(sita) -sin(sita); sin(sita) cos(sita)]
t=[tx;ty]
我现在已经大概知道了M的每组数与T的每组数据的对应关系 match,
match=[1 2; 3 4;5 6;……]
意思是:M的第1个 对应T的第2个;
M的第3个 对应T的第4个;
其中有一些对应错了。并且我不知道这个模型是啥。
我现在要做的,就是对这些东东进行ransac算法,找出这些错误的对应 outlier ,找到其中正确的对应,并求出这个模型 R 、t
————————————————————————————————————————————
算法如下
1. 从match 里面,随机找出n组(n>=2,因为是三个未知数 sita tx ty,每组数可以列俩方程,所以四个方程已经够求三个未知数了)
2. 对这n组,求出R t, 具体方法可以使用svd法求刚体最小二乘转置 http://blog.csdn.net/kfqcome/article/details/9358853
3. 对这个求出来的R t,应用到T上,得到T';结合match,找出T’中,不靠谱的(自己设一个阈值),就是outliers,靠谱的inliers
4. 对inliers的点,如2一样,求出新的R t
5. 评价这个模型,比如再进行一下3,求出inlier,inlier数目作为评价标准;或者inlier对M的误差作为标准。如果这个模型好 R_best=R t_best=t
6.重复以上过程k次,最后的R_best t_best就是结果了。
—————————————————————————————————————————————
就这样,可能哪里理解的不对,以后再改吧。目前来看,效果还是不错的。
RANSAC 剔除错误匹配 估计模型的更多相关文章
- 文献名:Repeat-Preserving Decoy Database for False Discovery Rate Estimation in Peptide Identication (用于肽段鉴定中错误发生率估计的能体现重复性的诱饵数据库)
文献名:Repeat-Preserving Decoy Database for False Discovery Rate Estimation in Peptide Identication (用于 ...
- 错误之thinkphp模型使用发生的错误
刚接触thinkphp模型的创建,在创建model类时在这里边声明了类的对象.唉,这是不理解的错误啊.什么叫做实例化模型对象,在控制器里边使用才创建. 模型这里写各种用到的函数. 这里我也体会到了查询 ...
- webpack配置别名alias出现的错误匹配
@(webpack) webpack是一款功能强大的前端构建工具,不仅仅是针对js,它也可通过各种loader来构建相关的less,html,image等各种资源,将webpack配合流程制定工具gu ...
- 使用经验风险最小化ERM方法来估计模型误差 开坑
虽然已经学习了许多机器学习的方法,可只有我们必须知道何时何处使用哪种方法,才能将他们正确运用起来. 那不妨使用经验最小化ERM方法来估计 . 首先: 其中, δ代表训练出错的概率 k代表假设类的个数 ...
- EF(Entity Framework)发生错误”正在创建模型,此时不可使用上下文“的解决办法。 正在创建模型,此时不可使用上下文。如果在 OnModelCreating 方法内使用上下文或如果多个线程同时访问同一上下文实例,可能引发此异常。请注意不保证 DbContext 的实例成员和相关类是线程安全的。 临时解决了这个问题,在Context的构造函数中,禁用了自动初始化:
解决方案: 禁止上下创建. 修改.删除,默认为true public DataDbContext() : base("name=DataDbContext") { this.Da ...
- SALM入门笔记(1):特征点的匹配
SLAM 主要分为两个部分:前端和后端,前端也就是视觉里程计(VO),它根据相邻图像的信息粗略的估计出相机的运动,给后端提供较好的初始值.VO的实现方法可以根据是否需要提取特征分为两类:基于特征点的方 ...
- SLAM入门之视觉里程计(1):特征点的匹配
SLAM 主要分为两个部分:前端和后端,前端也就是视觉里程计(VO),它根据相邻图像的信息粗略的估计出相机的运动,给后端提供较好的初始值.VO的实现方法可以根据是否需要提取特征分为两类:基于特征点的方 ...
- (转) SLAM系统的研究点介绍 与 Kinect视觉SLAM技术介绍
首页 视界智尚 算法技术 每日技术 来打我呀 注册 SLAM系统的研究点介绍 本文主要谈谈SLAM中的各个研究点,为研究生们(应该是博客的多数读者吧)作一个提纲挈领的摘要.然后,我 ...
- 视觉SLAM漫淡
视觉SLAM漫谈 1. 前言 开始做SLAM(机器人同时定位与建图)研究已经近一年了.从一年级开始对这个方向产生兴趣,到现在为止,也算是对这个领域有了大致的了解.然而越了解,越觉得这个方向难度很 ...
随机推荐
- Hadoop:操作 Hadoop Cluster
启动Hadoop 当完成所有的必要配置后,将HADOOP_CONF_DIR目录中的所有配置文件复制到所有机器,建议将HDFS和YARN后台进程一不同的用户身份运行,比如运行HDFS进程们的用户为hdf ...
- Ado.net 数据库读取文件
string connStr = ConfigurationManager.ConnectionStrings["connStr"].ConnectionString; using ...
- 在Excel里用vba给合并的单元格添加注释
Excel里使用VBA对已经合并的单元格添加注释,直接使用AddComment会报: 运行时错误 '1004':应用程序定义或者对象定义错误 找了很多文章都没找到怎么解决,最后发现在AddCommen ...
- python 国内源
pipy国内镜像目前有: http://pypi.douban.com/ 豆瓣 http://pypi.hustunique.com/ 华中理工大学 http://pypi.sdutlinux.o ...
- 记一次 IDEA mybatis.generator 自定义扩展插件
在使用 idea mybatis.generator 生成的代码,遇到 生成的代码很多重复的地方, 虽然代码是生成的,我们也不应该允许重复的代码出现,因为这些代码后期都要来手动维护. 对于生成时间戳注 ...
- IOS UITableview代理方法总结
tableview的datasource代理 @required的两个数据源方法 1.返回每个 session 中 cell 的个数 - (NSInteger)tableView:(UITableVi ...
- 虚拟机中Linux系统盘空间不足
虚拟机中Linux系统盘在使用过程中, 出现空间不足的提示. 使用命令du --max-depth=1 -h 查看Home目录下各个文件占用空间, 发现是./cache(隐藏文件)占用很大空间.进入c ...
- MongoDB 可视化工具RoboMongo --- windows
去官网下载安装包https://robomongo.org/download随便找一个目录进行安装(当然不要在c盘,和mongo安装路径无关) 安装完成后,启动MongoDB MongoDB的安装和使 ...
- delphi强制WebBrowser控件使用指定版本显示网页
function TFrmmain.WriteAppNameToReg:Boolean; var reg:TRegistry; sPath,sAppName:String; Sver:string; ...
- Nodejs基础中间件
Nodejs基础中间件Connect http://www.tuicool.com/articles/emeuie 关于作者 张丹(Conan), 程序员Java,R,PHP,Javascript ...