rplidar跑cartographer
一、Cartographer编译
cartographer依赖的大型第三方库很少,编译时基本没有依赖项问题,基本按照官方文档的步骤来,略作修改。使用的环境是Ubuntu16.04+ROS Kinetic
1.先装好wstool、rosdep、ninja
sudo apt-get install -y python-wstool python-rosdep ninja-build
2.建工作空间
mkdir catkin_ws
cd catkin_ws
用wstool初始化一下
wstool init src
(不知道这种初始化方式和catkin_init_workspace有什么区别)
3.下载cartographer、cartographer_ros、ceres源码
官方提供的下载方式是用rosinstall file,但是里面ceres的git地址要***,可以自己把三部分源码下到 src 里就好,三部分地址https://github.com/googlecartographer/cartographer、https://github.com/googlecartographer/cartographer_ros、https://github.com/ceres-solver/ceres-solver。下载后都是最新的,也不用 wstool update -t src 这条了。
4.装proto3
protobuf是谷歌的开源序列化框架(现在还不懂这是干什么的。。。)
catkin_ws/src/cartographer/scripts/install_proto3.sh 这个文件运行一下就可以了
5.安装依赖项
sudo rosdep init
rosdep update
rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y
6.最后编译
catkin_make_isolated --install --use-ninja
最后把环境变量写到bash里
vi .bashrc
最后一行加上
source ~/catkin_ws/install_isolated/setup.bash
7.跑一下官方demo试试
wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
二、rplidar驱动安装
https://github.com/robopeak/rplidar_ros 下载rplidar的ROS驱动,可以新建一个工作空间,用catkin_make 编译一下即可;也可以放在cartographer的工作空间里 src 下,执行一下最后的catkin_make_isolated --install --use-ninja 即可。
1.开始使用前要设置一下USB口的权限
ls -l /dev |grep ttyUSB
sudo chmod 666 /dev/ttyUSB0
这样每次插上rplidar都要设置一次,可以将权限写在rules里(参考这个):
root权限新建文件 /etc/udev/rules.d/70-ttyusb.rules
写入KERNEL=="ttyUSB[0-9]*", MODE="0666",保存,重新插上设备,在运行一次ls -l /dev |grep ttyUSB 查看权限,有两个 rw 就可以了。
(感觉这样写的话或许北阳的激光插上也不用设置权限了)
2.运行一下试试
驱动里提供了三个launch文件,跑cartographer的话用 rplidar.launch 即可
roslaunch rplidar_ros rplidar.launch
三、测试cartographer
先要修改 launch 文件和 lua 文件,launch文件在 demo_revo_lds.launch 基础上修改(跟其他教程学的)
主要两个地方,<remap from="scan" to="horizontal_laser_2d" />这一句后面的 horizontal_laser_2d 改成 scan (直接删掉这一句应该也可以);最后的 playbag 节点删掉。
然后是lua文件,这个里面对参数的调整也会关系到出图的效果,具体如何影响还在学习中,只想跑起来的话比较简单,在revo_lds.lua 基础上修改,tracking_frame 和 published_frame 这两个改成 laser 就可以了。
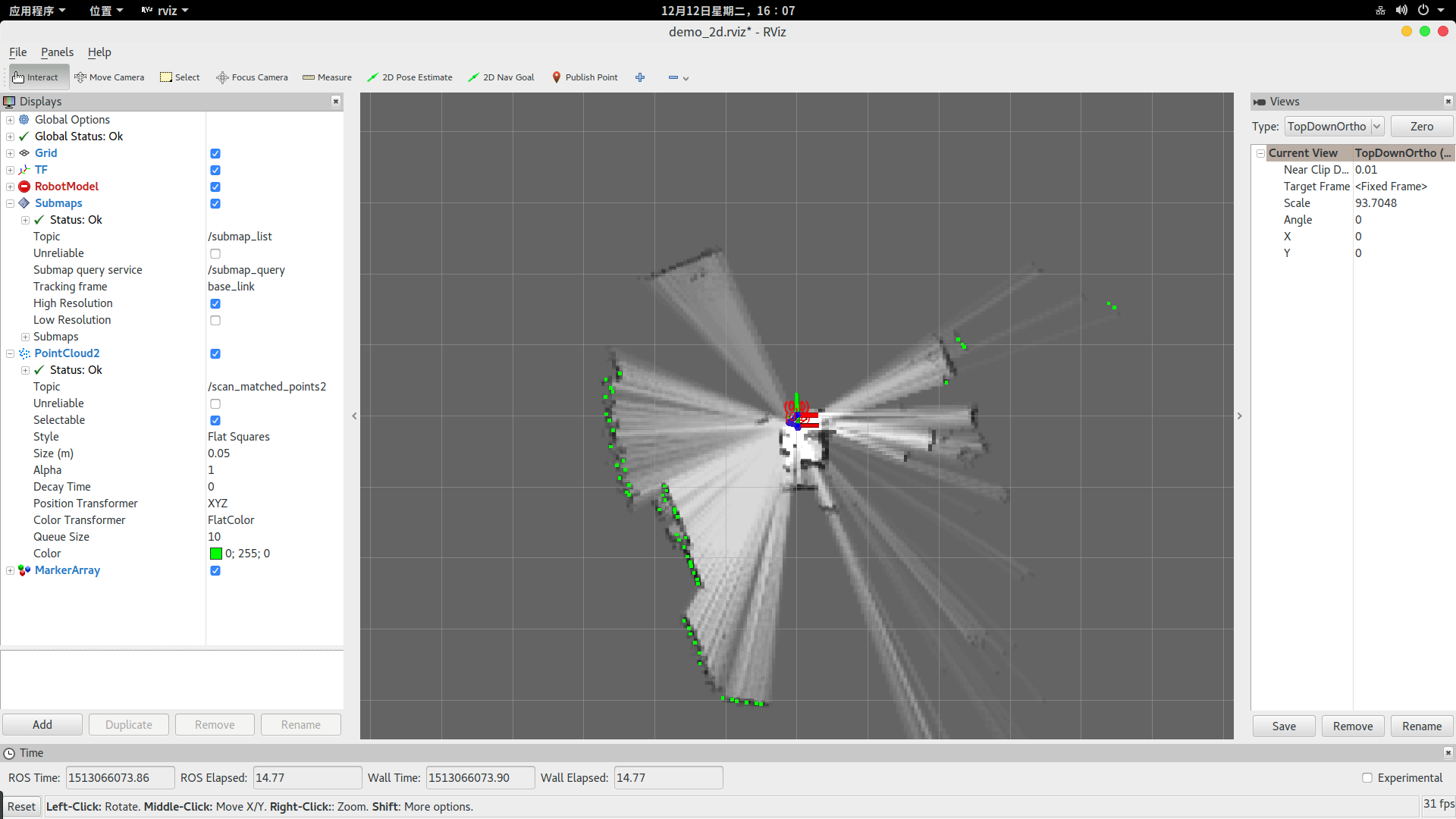
(随便放桌上运行了一下,为了截图而已。。)
四、总结
Linux的知识真的很欠缺,暑假才第一次用过Ubuntu,很多基础的命令都不熟,特别是Linux下编译程序是真挺麻烦的,对cmakelists文件了解太少,只能慢慢用到啥就去查,然后多做笔记。
一开始没搞明白ros里面几个坐标系的转换,虽然知道是tf 问题,但是 lua 文件老是设置不好,ROS的基础知识还是要多看,特别是后面看源码的话还是要有ros基础的。
cartographer的源码要开始看了,现在只是对大体架构有了解,还是要深入了解,多半是个挺痛苦的过程吧,哈哈。
rplidar跑cartographer的更多相关文章
- 【ros】rplidar Hector Slam
想用rplidar跑一下hector slam,在网上发现了几个教程写的都不错,但是亲测发现都有点不足,综合了一下,进行补充. 1. 安装ros 和 创建工作空间 http://blog.csdn.n ...
- Cartographer安装
安装过程: 官方安装教程: https://google-cartographer-ros.readthedocs.io/en/latest/index.html # Install wstool a ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- 实时Cartographer测试(1) - rplidar
1.rplidar实时测试 参考文献:http://www.cnblogs.com/liangyf0312/p/8028441.html 修改USB转串口权限 yhexie@ubuntu:~$ cd ...
- rplidar & hector slam without odometry
接上一篇:1.rplidar测试 方式一:测试使用rplidar A2跑一下手持的hector slam,参考文章:用hector mapping构建地图 但是roslaunch exbotxi_br ...
- Rplidar学习(五)—— rplidar使用cartographer_ros进行地图云生成
一.Cartographer简介 Cartographer是google开源的通用2D和3D定位与地图同步构建的SLAM工具,并提供ROS接口.官网地址:https://github.com/goog ...
- jq跑马灯效果
这几天公司产品有个无缝循环滚动的广告跑马灯要做,最开始想到的是<marquee>标签,但在PC端正常,在安卓广告屏上却怎么都跑不动,后来用的css3的animation,结果也是PC端及其 ...
- fedora上部署ASP.NET——(卡带式电脑跑.NET WEB服务器)
andrew,20130601,guilin 本文记录在树莓派(fedora)上部署ASP.NET MVC2 的过程. 本文共分为六部分,分别是前置条件,Apache的安装,Mysql的安装,安装mo ...
- 如何让我们的PHP在Jexus中跑起来
最近一段时间,经常看到不少的朋友在问,应该怎么设置才能够让Jexus支持PHP.其实,Jexus在很早之前就已经是可以支持PHP,像Apache或Nginx一样充当PHP的Web服务器的.不过由于没有 ...
随机推荐
- mysql 创建merge表方便查询
SELECT COUNT(*) FROM `comment` SHOW CREATE TABLE `comment` CREATE TABLE `comment1` ( `id` ) NOT NULL ...
- windows内核情景分析之—— KeRaiseIrql函数与KeLowerIrql()函数
windows内核情景分析之—— KeRaiseIrql函数与KeLowerIrql()函数 1.KeRaiseIrql函数 这个 KeRaiseIrql() 只是简单地调用 hal 模块的 KfRa ...
- 【技术分享会】 iOS开发简述
前言 Objective-C(简称OC)也是面向对象的编程语言,运用的许多面向对象的编程思想和C# . Java .C++等变成语言都是相通的: 本次技术讲座主要讲一些设计模式.设计思想等计算机语言通 ...
- 【软件分析与挖掘】ELBlocker: Predicting blocking bugs with ensemble imbalance learning
摘要: 提出一种方法——ELBlocker,用于自动检测出Blocking Bugs(prevent other bugs from being fixed). 难度在于这些Blocking Bugs仅 ...
- 【Spring Boot&&Spring Cloud系列】Spring Boot中使用NoSql数据库Redis
github地址:https://github.com/AndyFlower/Spring-Boot-Learn/tree/master/spring-boot-nosql-redis 一.加入依赖到 ...
- web前端面试题(一)
1 选择题 1.1 默认情况下,使用P标记会形成什么效果() A.在文字P所在位置中加入8个空格 B.P后面的文字会变成粗体 C.开始新的一行 D.P后面的文字会变成斜体 答案: C 1.2 ...
- [原]关闭selinux
检查selinux状态 [root@controller0 ~]# getenforce enforcing #disabled表示关闭状态 enforcing表示开启状 临时关闭selinux(不用 ...
- NET的堆和栈04,对托管和非托管资源的垃圾回收以及内存分配
在" .NET的堆和栈01,基本概念.值类型内存分配"中,了解了"堆"和"栈"的基本概念,以及值类型的内存分配.我们知道:当执行一个方法的时 ...
- 关于IE和360安全浏览器如何添加百度搜索为默认的搜索引擎
以IE和360浏览器为例,细心的人可能会发现.IE浏览器默认使用的必应搜索引擎(cn.bing.com) 而360安全浏览器默认使用的好搜搜索引擎.(haosou.com),对于两种浏览器,我们都可以 ...
- [Key] RegCure Pro
Serial RegCure Pro : 4A803-C4F23-422B6-1F3D6 http://www.paretologic.com/product/regcure-pro/