svo论文随手记
论文链接:http://rpg.ifi.uzh.ch/docs/ICRA14_Forster.pdf
论文提出了一种半直接单目视觉里程计,在精确性、鲁棒性和速度方面都有较大的优势。将基于特征的方法(包括追踪特征点和关键帧选择)和基于图像强度的直接法进行结合。
INTRODUCTION介绍了一些基于视觉的运动估计(前端)方法,主要包括基于特征的方法和直接法。特征方法在连续帧中使用描述子进行匹配后采用对极几何进行求解,最后最小化重投影误差优化位姿。该方法太依赖于特征点提取和匹配的准确度,而大多数特征点都为了速度进行优化,而精度则不够高,容易导致误匹配,因此位姿估计易出现漂移。而直接法利用图像强度的变化,最小化光度误差,使用了图像中的所有信息,即使特征点较少或图像模糊结果仍然较好。同时也节省了特征检测和描述子计算的过程。
本文结合了特征点法和直接法,只在选择关键帧时采用特征点法初始化3D点,一旦相机初始位置确定,直接法估计位姿时采用关键点周围的小方块进行追踪。在关键点使用深度滤波器更新,当深度收敛时才将该点加入地图中。

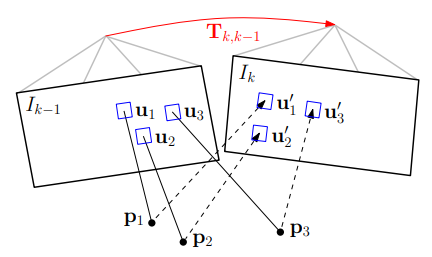
system overview中采用了两个线程:运动估计和地图。运动估计中,采用半直接法:第一步估计出$I_k$和$I_{k-1}$这两帧图像之间的相对位姿,即最小化两帧中相同3D点对应的像素点之间的光度误差。如下图所示:(红色为优化的变量,蓝色的为优化代价)
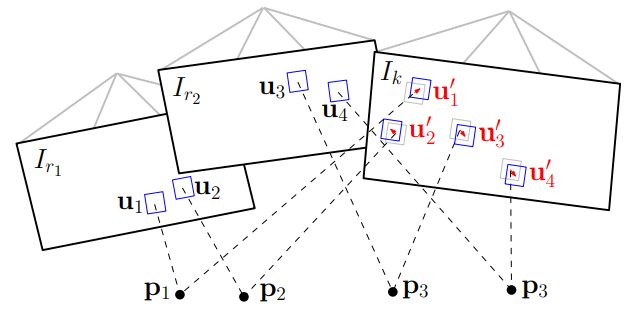
第二步:由于3D点和相机位姿的误差,在进行一次优化,即最小化之前的关键帧$r_i$和当前帧的每个块的光度误差,这次优化的是当前帧的2d位置,如下图所示:
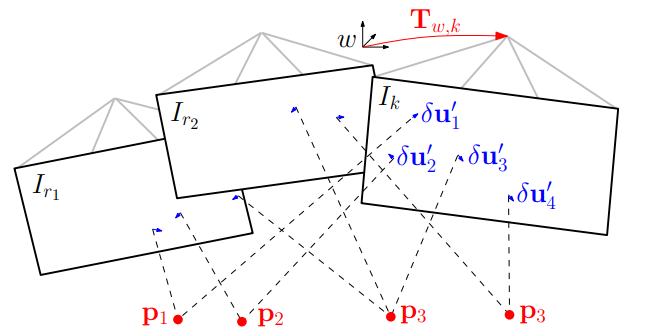
最后一步同时优化位姿和三维空间点,通过最小化重投影误差,该误差利用了第二步中的结果,如下图所示:
在地图线程中,对于每个2D特征都初始化一个深度滤波器,估计其3d点的深度,当新的关键帧创建时进行初始化,在其他帧进入时更使用贝叶斯滤波新该滤波器,当深度收敛时将该3D点加入地图中。
Notation部分主要是涉及到一些字符公式,定义了一些集合包括二维像素平面和三维点集合等。3D点到像素平面,定义了重投影函数(公式1),这里应该只需要相机内参,以及其逆函数(公式2),采用李代数求解位姿,得到公式3。
MOTION ESTIMATION中运动估计三个步骤的详细说明
A.稀疏点运动模型图像对齐 即系统概述中的第一步
公式4中最小化连续两帧之间的光度误差,其中光度误差可由公式5求出:前一帧的深度已知,将前一帧的像素点和深度通过2d->3d变换(公式2)到3d点,将该3d点通过T(T为当前优化变量)变换到当前帧下,再通过3d->2d变换(公式1)到2d点,即当前帧的像素位置,得到其光度值,与上一帧的像素点求误差。
为了简单起见,假设强度残差为单位方差的正态分布,则可以转化为最小二乘问题。我们只知道稀疏特征点处的深度,但是前文提到采用块匹配,因此使用稀疏特征点的深度替代,进而求出所有块的最小光度误差,见公式7。但公式7不是线性的,因此使用高斯牛顿法,此处还参考了文献27的方法,下次等有时间再研究QAQ。得到光度误差公式8,并对要求的相对位姿进行更新(公式9)。在位姿为0处对其进行泰勒展开,使用高斯牛顿法求解,具体见公式10-12,求出的雅克比矩阵和十四讲中类似,由于是采用块匹配,块的大小为4*4,雅克比矩阵的维度为16*6。由于第k-1帧的光度以及三维点未变,因此可以预先求出雅克比矩阵,实现加速。
B.特征对齐 即系统概述中的第2步
在上一步中,假设求出了第k帧时的三维点,但由于上一帧的深度可能不准,变换的该三维点可能存在误差,加上相机的位姿误差,因此为了进行优化,将相机位姿与地图(前几帧)进行一次对齐,而不是与上一帧对齐。具体做法:将地图中已有的3D点投影到当前帧和前几帧上(每一帧的位姿第一步求出来了),通过所有块的最小化光度误差优化3D点在当前帧的投影,使用Lucas光流法。这里采用仿射变换:一方面因为这一步的块更大(8*8),另一方面相隔的帧数可能比较多。
C.位姿和结构优化
通过第二步我们得到了图像特征之间的对应关系,由于采用的是仿射变换,因此产生了像素误差,怎么理解呢?其实就是图像变换之后不对齐了。因此再做一个最小化投影误差,见公式17。这里还可以做个局部BA对三维点和位姿都进行优化,但实际算法省去了。
D.讨论
上一节的A和C都是优化相机的位姿,冗余么?其实可以直接从第二步,使用lucas光流法实现跟踪,但这样花的时间长,且准确度不够,svo只只需要优化相机的位姿共6个参数,第一步操作满足对极集合限制,确保没有外点。而只使用第一步则会产生较大的漂移。
MAPPING
已知图像以及其位姿,通过估计其深度可以得到3D点,深度估计采用概率分布模型,通过当前图像和相关帧之间的三角化可以计算深度,在极线上进行搜索,相关性最大的块的深度作为3d点深度,当深度收敛时,插入3D点。注意,我们只在关键帧上设定深度滤波器,也就是只求关键帧上关键点的深度。深度初始化为高斯均匀分布,范围为$[d_{min},d_{max}]$。公式见原文,参考了文献[28]和[29]。熟练过程中只需要相机小的运动就能减少深度的不确定性,与仅仅三角化相比,大大减少了外点的数目,因此可以用在具有高度相似的环境中,也可用于稠密建图。
实现细节
- 初始化时,根据前两帧图像,假设它们在同意平面上,求出单应矩阵,初始地图从前两帧中进行重投影
- 为了处理相机存在较大的移动,采用图像金字塔,降采样一半为五层,从最粗糙层开始,每一层上进行误差优化直到收敛,下一层的结果作为上一层的初始化,为了节省时间,在第三层收敛了就不进行了。
- 地图中关键帧的数量保持一定,用于特征匹配和结构优化,确定关键帧的方式之一:新的帧深度超过之前的关键帧的平均深度12%,关键帧满了后删除时间最久远的关键帧。
- 在地图线程中,将图像分为固定的网格,每个网格30*30个像素,网格中初始化一个新的深度滤波器,除非已经找到对应的地图点。该网格也用于重投影。
实验
数据集是在无人机上的俯视相机中采的。再准确率、运行时间和鲁棒性上进行了分析。
时间上快是因为在位姿估计时没有使用特征匹配,在svo中使用了更好的特征,因为深度滤波器的存在,使得特征的追踪变得可靠。深度滤波器也使得鲁棒性更强。
结论
由于使用直接法不用特征匹配,速度快,因此适用于无人机。高速的运动估计和概率方法滤除外点,使得在小场景、重复、高速率环境表现较好。
svo论文随手记的更多相关文章
- SVO+PL-SVO+PL-StVO
PL-SVO是基于点.线特征的半直接法单目视觉里程计,我们先来介绍一下基于点特征的SVO,因为是在这个基础上提出的. [1]References: SVO: Fast Semi-Direct ...
- SLAMCN资料收藏转载
网页链接地址:http://www.slamcn.org/index.php/%E9%A6%96%E9%A1%B5 资料非常丰富,内容如下: 首页 目录 [隐藏] 1 SLAM 介绍 1.1 什么是 ...
- SLAM学习笔记
ORB_SLAM2源码: 获得旋转矩阵,来自这里:http://www.cnblogs.com/shang-slam/p/6406584.html 关于Covisibility图来自:http://b ...
- AeroSpike踩坑手记1:Architecture of a Real Time Operational DBMS论文导读
又开了一个新的坑,笔者工作之后维护着一个 NoSQL 数据库.而笔者维护的数据库正是基于社区版本的 Aerospike打造而来.所以这个踩坑系列的文章属于工作总结型的内容,会将使用开发 Aerospi ...
- SVO原理解析
最近空闲时间在研究Semi-Direct Monocular Visual Odometry(SVO)[1,2],觉得它值得写一写.另外,SVO的运算量相对较小,我想在手机上尝试实现它. 关于SVO的 ...
- SLAM论文阅读笔记
[1]陈卫东, 张飞. 移动机器人的同步自定位与地图创建研究进展[J]. 控制理论与应用, 2005, 22(3):455-460. [2]Cadena C, Carlone L, Carrillo ...
- 基于视觉的 SLAM/Visual Odometry (VO) 开源资料、博客和论文列表
基于视觉的 SLAM/Visual Odometry (VO) 开源资料.博客和论文列表 以下为机器翻译,具体参考原文: https://github.com/tzutalin/awesome-vis ...
- SVO详细解读
SVO详细解读 极品巧克力 前言 接上一篇文章<深度滤波器详细解读>. SVO(Semi-Direct Monocular Visual Odometry)是苏黎世大学Scaramuzza ...
- PayPal高级工程总监:读完这100篇论文 就能成大数据高手(附论文下载)
100 open source Big Data architecture papers for data professionals. 读完这100篇论文 就能成大数据高手 作者 白宁超 2016年 ...
随机推荐
- 理想的GVS智能照明体验,就在汕头迎宾花园酒店
汕头,依海而生,海在城中央是汕头特色. 汕头湾将汕头分为南北两岸,造就绝美市区海岸线,一碧万顷的海湾,焕然一新的海港,在市区就能直接看海. 在北山湾,动可结伴冲浪,静可观海吹风,动静都是一种快乐. 当 ...
- 01:HTTP协议
软件开发架构 cs 客户端 服务端bs 浏览器 服务端ps:bs本质也是cs 浏览器窗口输入网址回车发生了几件事 """ 1 浏览器朝服务端发送请求 2 服务端接受请 ...
- 【题解】ball 数论
题目 题目描述: 众所周知的是Dr.Bai 穷困潦倒负债累累,最近还因邦邦的出现被班上的男孩子们几乎打入冷宫,所以Dr.Bai 决定去打工赚钱. Dr.Bai 决定做玩♂球的工作,工作内容如下. 老板 ...
- Ubuntu安装ibmmq
一.前言 安装整个ibmmq的过程中,真的气炸了,在网上搜索到的答案千篇一律,一个安装部署文档居然没有链接地址:为了找到这个开发版本的下载地址找了一下午,不容易啊.也提醒了自己写博文还是得有责任心,把 ...
- Docker笔记--ubuntu安装docker
Docker笔记--ubuntu安装docker 1.更换国内软件源,推荐中国科技大学的源,稳定速度快(可选) sudo cp /etc/apt/sources.list /etc/apt/sourc ...
- Auto.js无障碍免root脚本开发学习
Auto.js 简单入门 官方文档:https://hyb1996.github.io/AutoJs-Docs/#/ https://blog.csdn.net/QiHsMing/article/de ...
- 温故知新,基于Nexus3和Docker搭建私有Docker Mirrors镜像库
前言 接着上一篇文章关于基于Nexus3和Docker搭建私有Nuget服务的探索,我们可以进一步利用Nexus3来创建一个私有的Docker镜像库满足内部需求. 仓库类型 hosted: 本地存储, ...
- Go基础语法0x01-数组
数组 1.Go数组简介 数组是Go语言编程中最常用的数据结构之一.顾名思义,数组就是指一系列同一类型数据的集合.数组中包含的每个数据被称为数组元素(element),一个数组包含的元素个数被称为数组的 ...
- Spring Boot配置Filter
此博客是学习Spring Boot过程中记录的,一来为了加深自己的理解,二来也希望这篇博客能帮到有需要的朋友.同时如果有错误,希望各位不吝指教 一.通过注入Bean的方式配置Filter: 注意:此方 ...
- Docker搭建EFK日志收集系统,并自定义es索引名
EFK架构图 一.EFK简介 EFK不是一个软件,而是一套解决方案,并且都是开源软件,之间互相配合使用,完美衔接,高效的满足了很多场合的应用,是目前主流的一种日志系统. EFK是三个开源软件的缩写,分 ...