电赛总结(二)——AD芯片总结之AD7705
1、特性参数
(1)16位无丢失代码性AD转化器
(2)只需要3.3V供电(即只需要单片机即可供电)
(3)双通道差分输入
(4)基准电压为2.5V时,在单极性信号下,输入范围是0到2.5V,在双极性输入下,输入范围是-1.25到+1.25
(5)低功耗CMOS芯片,功耗一般为20uW
(6)可编程,可编程增益,以及降噪参数等。
2、引脚排列
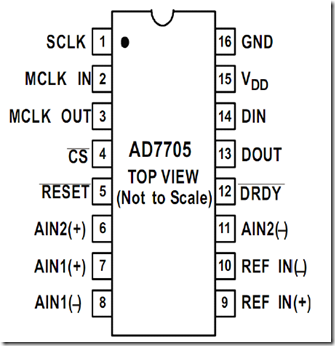
3、引脚功能说明
| 管脚名称 | 功能 |
| SCLK |
串行时钟,施密特逻辑输入。将一个外部的串行时钟加于这一输入端口,以访问AD7705/7706 的串行数据。和单片机传输数据时的控制时钟 |
| MCLKIN |
为转换器提供主时钟信号。能以晶体/谐振器或外部时钟的形式提供。晶体/谐振器可以接在MCLKIN 和MCLKOUT 二引脚之间。此外,MCLKIN 也可用CMOS 兼容的时钟驱动, 而MCLKOUT 不连接。时钟频率的范围为500kHz~5MHz |
| MCLKOUT |
当主时钟为晶体/谐振器时,晶体/谐振器被接在MCLKIN 和MCLKOUT 之间。如果在MCLKIN 引脚处接上一个外部时钟,MCLKOUT 将提供一个反相时钟信号。这个时钟可以用来为外部电路提供时钟源,且可以驱动一个CMOS 负载。如果用户不需要,MCLKOUT 可以通过时钟寄存器中的CLKDIS位关掉。这样,器件不会在MCLKOUT 脚上驱动电容负载而消耗不必要的功率 |
| CS’ |
片选,低电平有效的逻辑输入,选择AD7705/7706。将该引脚接为低电平,AD7705/7706 能以三线接口模式运行(以SCLK、DIN 和DOUT 与器件接口)。在串行总线上带有多个器件的系统中,可由CS’对这些器件作出选择,或在与AD7705/7706 通信时,CS’可用作帧同步信号 |
| RESET |
复位输入。低电平有效的输入,将器件的控制逻辑、接口逻辑、校准系数、数字滤波器和模拟调制器复位至上电状态 |
| AIN2(+) | 差分模拟输入通道2 的正输入端。 |
| AIN1(+) | 差分模拟输入通道1 的正输入端; |
| REFIN(+) | 基准输入端,基准输入是差分的,并规定REFIN(+)必须大于REFIN(-)。REFIN(+)可以取VDD 和GND 之间的任何值 |
| REFIN(-) | 基准输入端,REFIN(-)可以取VDD 和GND 之间的任何值,且满足REFIN(+)大于REFIN(-) |
| DRDY’ |
逻辑输出。这个输出端上的逻辑低电平表示可从AD7705/7706 的数据寄存器获取新的输出字。完成对一个完全的输出字的读操作后,DRDY’引脚立即回到高电平。如果在两次输出更新之间,不发生数据读出,DRDY’将在下一次输出更新前500×tCLKIN 时间返回高电平。当DRDY’处于高电平时,不能进行读操作,以免数据寄存器中的数据正在被更新时进行读操作。当数据被更新后, |
| DOUT | 串行数据输出端 |
| DIN | 串行数据输入端 |
| VDD | 电源电压,+3.3V |
| GND | 内部电路的地电位基准点 |
4、片内寄存器
(1)概述
AD7705/7706 片内包括8 个寄存器,这些寄存器通过器件的串行口访问。第一个是通信寄存器,它管理通道选择,决定下一个操作是读操作还是写操作,以及下一次读或写哪一个寄存器。所有与器件的通信必须从写入通信寄存器开始。上电或复位后,器件等待在通信寄存器上进行一次写操作。这一写到通信寄存器的数据决定下一次操作是读还是写,同时决定这次读操作或写操作在哪个寄存器上发生。所以,写任何其它寄存器首先要写通信寄存器,然后才能写选定的寄存器。
(2)通信寄存器
通信寄存器是一个8 位寄存器,既可以读出数据也可以把数据写进去。所有与器件的通信必须从写该寄存器开始。写上去的数据决定下一次读操作或写操作在哪个寄存器上发生。一旦在选定的寄存器上完成了下一次读操作或写操作,接口返回到通信寄存器接收一次写操作的状态。

|
名称 |
功能 |
|
DRDY’ |
对于写操作,必须有一个“0”被写到这位,以便通信寄存器上的写操作能够准确完成。如果“1”被写到这位,后续各位将不能写入该寄存器。 |
| RS2-RS0 |
寄存器选择位。这3 个位选择下次读/写操作在8 个片内寄存器中的哪一个上发生
|
| R/W |
读/写选择。这个位选择下次操作是对选定的寄存器读还是写。“0”表示下次操作是写,“1”表示下次操作是读。 |
STBY |
等待模式。此位上写“1”,则处于等待或掉电模式。在这种模式下,器件消耗的电源电流仅为10μA。在等待模式时,器件将保持它的校准系数和控制字信息。写“0”,器件处于正常工作模式。 |
| CHI-CH0 | 通道选择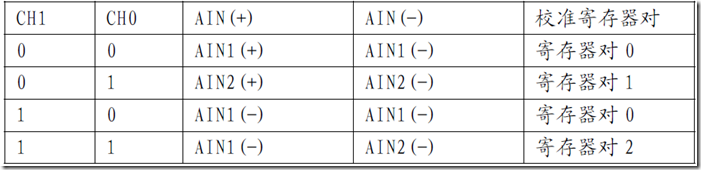 |

(3)设置寄存器

| 名称 | 功能 |
| MD1 MD0 | 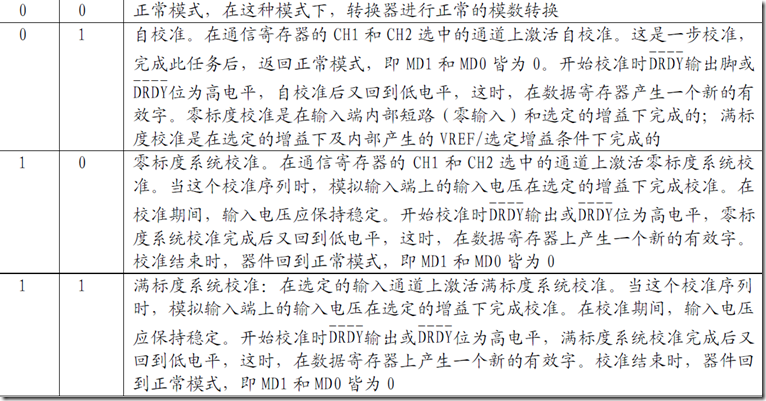 |
| G2-G0 | 增益选择位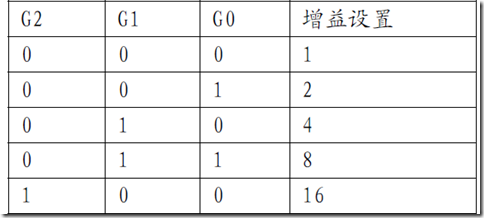 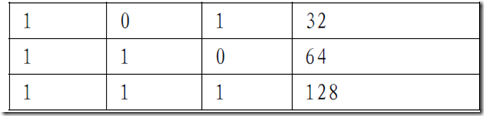 |
| B/U | 单极性/双极性工作。“0”表示选择双极性操作,“1”表示选择单极性工作。 |
| BUF |
缓冲器控制。“0”表示片内缓冲器短路,缓冲器短路后,电源电流降低。此位处于高电平时,缓冲器与模拟输入串联,输入端允许处理高阻抗源。 |
| FSYNC |
滤波器同步。该位处于高电平时,数字滤波器的节点、滤波器控制逻辑和校准控制逻辑处于复位状态下,同时,模拟调制器也被控制在复位状态下。当处于低电平时,调制器和滤波器开始处理数据,并在3×(1/输出更新速率)时间内(也就是滤器的稳定时间)产生一个有效字。FSYNC 不影响数字接口,也不使DRDY’输出复位(如果它是低电平)。 |
(4)时钟寄存器

| 名称 | 功能 |
| ZERO | 必须在这些位上写零,以确保AD7705/7706 正确操作。 |
| CLKDIS |
主时钟禁止位。逻辑“ 1” 表示阻止主时钟在MCLKOUT 引脚上输出。禁止时,MCLKOUT 输出引脚处于低电平。 |
| CLKDIV |
CLKDIV 时钟分频器位。CLKDIV 置为逻辑1 时,MCLKIN 引脚处的时钟频率在被AD7705/7706,使用前进行2 分频。“1”是二分频,“0”没有分频。 |
| CLK |
时钟位。CLK 位应根据AD7705/7706 的工作频率而设置。如果转换器的主时钟频率为2.4576MHz(CLKDIV=0)或为4.9152MHz(CLKDIV=1),CLK 应置“0”。如果器件的主时钟频率为1MHz(CLKDIV=0)或2MHz (CLKDIV=1),则该位应置“1”。该位为给定的工作频率设置适当的标度电流,并且也(与FS1 和FS0 一起)选择器件的输出更新率。 |
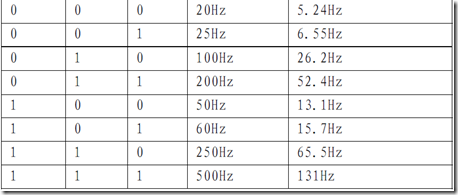
| FS1,FS2 |
滤波器选择位,它与CLK 一起决定器件的输出更新率。表12 显示了滤波器的第一陷波和-3dB 频率。
|

(5)数据寄存器
数据寄存器是一个16 位只读寄存器,它包含了来自AD7705/7706 最新的转换结果。如果通信寄存器将器件设置成对该寄存器写操作,则必定会实际上发生一次写操作以使器件返回到准备对通信寄存器的写操作,但是向器件写入的16 位数字将被AD7705/7706 忽略。
(6)测试寄存器
测试寄存器用于测试器件时。建议用户不要改变测试寄存器的任何位的默认值(上电或复位时自动置入全0),否则当器件处于测试模式时,不能正确运行。
(7)零标度校准寄存器、满标度校准寄存器一般不进行设置
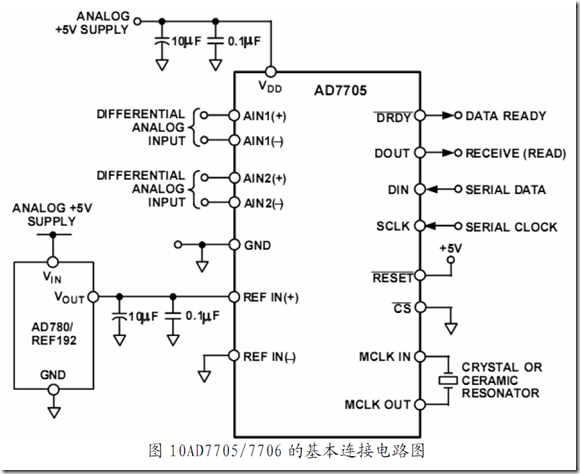
5、芯片外围电路图
6、STM32F103ZE驱动程序
使用SPI模式驱动的AD7705
#ifndef __SPI_H
#define __SPI_H #include "stm32f10x.h"
#include "pbdata.h" //×ԱຯÊý
#include "timer.h"
#include "gpio.h"
#include "baseFunc.h" /* ???? SPI1_REMAP = 0
SPI1_NSS PA4 CS
SPI1_SCK PA5 CLK
SPI1_MISO PA6 DOUT
SPI1_MOSI PA7 DIN
PA8 DRDY */ #define LCD_CS Pin4
#define CLK Pin5
#define DOUT Pin6
#define Din Pin7
#define DRDY Pin8 #define CS_ADC_LOW() GPIO_ResetBits(GPIOA,GPIO_Pin_4) /*??*/
#define CS_ADC_HIGH() GPIO_SetBits(GPIOA,GPIO_Pin_4) void SPIx_Init(void); u8 SPIx_ReadWriteByte(u8 TxData); #endif
#include "spi.h" /* ???? SPI1_REMAP = 0
SPI1_NSS PA4 CS
SPI1_SCK PA5 CLK
SPI1_MISO PA6 DOUT
SPI1_MOSI PA7 DIN
PA8 DRDY */ int temp; SPI_InitTypeDef SPI_InitStructure; void SPIx_Init(void)
{ GPIO_InitTypeDef GPIO_InitStructure; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_SPI1|RCC_APB2Periph_AFIO, ENABLE ); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;// AdDrdy
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU ;//PC8
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_8); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_4); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5 | GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP ;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure); SPI_Cmd(SPI1, DISABLE);
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(SPI1, &SPI_InitStructure); SPI_Cmd(SPI1, ENABLE); CS_ADC_LOW();
temp=SPIx_ReadWriteByte(0xff);
CS_ADC_HIGH();
} u8 SPIx_ReadWriteByte(u8 TxData)
{
u8 retry=0; while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_TXE) == RESET)
{
retry++;
if(retry>200)return 0;
} SPI_I2S_SendData(SPI1, TxData);
retry=0; while (SPI_I2S_GetFlagStatus(SPI1, SPI_I2S_FLAG_RXNE) == RESET)
{
retry++;
if(retry>200)return 0;
} return SPI_I2S_ReceiveData(SPI1);
}
#ifndef __ADC7705_H
#define __ADC7705_H #include "stm32f10x.h" //×ԱຯÊý
#include "timer.h"
#include "gpio.h"
#include "baseFunc.h"
#include "spi.h"
#include "LCD3.2.h" void Init_AD7705(u8 chnanel) ; u16 GetData7705_CH1(void) ; u16 GetData7705_CH2(void) ; void ADC_7705_single(void); void ADC_7705_double(void); void AD7705_WriteByte(u8 Dst_Addr); #endif
#include "adc7705.h"
#include "usart1.h" int tag=1; /********AD7705?????***********/ void AD7705_WriteByte(u8 Dst_Addr)
{
CS_ADC_LOW();
delay_us(20);
SPIx_ReadWriteByte(Dst_Addr);
delay_us(100);
CS_ADC_HIGH();
} void Init_AD7705(u8 chnanel)
{
u8 i; for(i=0;i<150;i++)
{
AD7705_WriteByte(0xff);
}
delay_ms(1); switch(chnanel)
{
case 1:
AD7705_WriteByte(0x20);
delay_ms(1);
AD7705_WriteByte(0x03);
delay_ms(1);
AD7705_WriteByte(0x10);
delay_ms(1);
if(tag==1)
{
AD7705_WriteByte(0x4C); //µ¥¼«ÐÔ
}
else
{
AD7705_WriteByte(0x48);
}
break;
case 2:
AD7705_WriteByte(0x21);
delay_ms(1);
AD7705_WriteByte(0x03);
delay_ms(1);
AD7705_WriteByte(0x11);
delay_ms(1);
if(tag==1)
{
AD7705_WriteByte(0x4C); //µ¥¼«ÐÔ
}
else
{
AD7705_WriteByte(0x48);
}
break;
default:
break;
}
} /* ?AD7705???? ????channel */
u16 GetData7705_CH1(void)
{
u16 temp1 = 0;
u16 DataL = 0;
u16 DataH = 0; Init_AD7705(1); //?????1
delay_ms(1);
AD7705_WriteByte(0x38); //??CH1?????? while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)==1); //??????AdDrdy=0 CS_ADC_LOW();
delay_us(20);
DataH = SPIx_ReadWriteByte(0xff);
DataL = SPIx_ReadWriteByte(0xff);
delay_us(200);
CS_ADC_HIGH();
DataH = DataH << 8;
temp1 = DataH | DataL; return temp1;
} u16 GetData7705_CH2(void)
{
u16 temp2 = 0;
u16 DataL = 0;
u16 DataH = 0;
Init_AD7705(2); //?????2
delay_ms(1);
AD7705_WriteByte(0x39); //??CH2??????
while(GPIO_ReadInputDataBit(GPIOA, GPIO_Pin_8)==1); //??????AdDrdy=0 CS_ADC_LOW(); //????
delay_us(20);
DataH = SPIx_ReadWriteByte(0xff);
DataL = SPIx_ReadWriteByte(0xff);
delay_us(100);
CS_ADC_HIGH(); //????
DataH = DataH << 8;
temp2 = DataH | DataL; return temp2;
} void ADC_7705_single(void)
{
u8 num1[]={"0000.0mV"};
u8 num2[]={"0000.0mV"}; u16 RCH1_16bit,RCH2_16bit;
u32 l_ncm1,l_ncm2; tag=1;
RCH1_16bit = GetData7705_CH1();
l_ncm1 = (u32)(RCH1_16bit*(25000.0/65535));
RCH2_16bit = GetData7705_CH2();
l_ncm2 = (u32)(RCH2_16bit*(25000.0/65535)); num1[0] = l_ncm1/10000+'0';
num1[1] = (l_ncm1%10000)/1000+'0';
num1[2] = (l_ncm1%1000)/100+'0';
num1[3] = (l_ncm1%100)/10+'0';
num1[5] = l_ncm1%10+'0'; num2[0] = l_ncm2/10000+'0';
num2[1] = (l_ncm2%10000)/1000+'0';
num2[2] = (l_ncm2%1000)/100+'0';
num2[3] = (l_ncm2%100)/10+'0';
num2[5] = l_ncm2%10+'0'; LCD_PutString(0,0,num1,Blue,White);
LCD_PutString(0,20,num2,Blue,White); } void ADC_7705_double(void)
{
u8 num1[]={"+0000.0MV"};
u8 num2[]={"+0000.0MV"}; u16 RCH1_16bit,RCH2_16bit;
u32 l_ncm1,l_ncm2,NUM1[20],NUM2[20],temp,temp2;
int i,j,x,y;
int fuhao1=0;
int fuhao2=0; tag=0;
for(i=0;i<10;i++)
{
RCH1_16bit = GetData7705_CH1();
RCH2_16bit = GetData7705_CH2();
if(RCH1_16bit>=0x8000)
{
fuhao1++;
l_ncm1 = (u32)((RCH1_16bit-0x8000)*(25000.0/65535*2));
}
else
{
fuhao1--;
l_ncm1 = (u32)((0x8000-RCH1_16bit)*(25000.0/65535*2));
}
if(RCH2_16bit>=0x8000)
{
fuhao2++;
l_ncm2 = (u32)((RCH2_16bit-0x8000)*(25000.0/65535*2));
}
else
{
fuhao2--;
l_ncm2 = (u32)((0x8000-RCH2_16bit)*(25000.0/65535*2));
}
NUM1[i]=l_ncm1;
NUM2[i]=l_ncm2;
} for(i=0;i<9;i++)
{
x=i;
for(j=i+1;j<10;j++)
{
if(NUM1[x]>NUM1[j])
{
x=j;
}
if(NUM2[y]>NUM2[j])
{
y=j;
}
}
temp=NUM1[x];
NUM1[x]=NUM1[i];
NUM1[i]=temp;
temp2=NUM2[y];
NUM2[y]=NUM2[i];
NUM2[i]=temp2;
} for(i=3,l_ncm1=NUM1[2];i<9;i++)
{
l_ncm1=(l_ncm1+NUM1[i])/2;
} for(i=3,l_ncm2=NUM2[2];i<9;i++)
{
l_ncm2=(l_ncm2+NUM2[i])/2;
} if(fuhao1>=0)
{
num1[0] = '+';
num1[1] = l_ncm1/10000+'0';
num1[2] = (l_ncm1%10000)/1000+'0';
num1[3] = (l_ncm1%1000)/100+'0';
num1[4] = (l_ncm1%100)/10+'0';
num1[6] = l_ncm1%10+'0';
}
else
{ num1[0] = '-';
num1[1] = l_ncm1/10000+'0';
num1[2] = (l_ncm1%10000)/1000+'0';
num1[3] = (l_ncm1%1000)/100+'0';
num1[4] = (l_ncm1%100)/10+'0';
num1[6] = l_ncm1%10+'0';
} if(fuhao2>=0)
{ num2[0] = '+';
num2[1] = l_ncm2/10000+'0';
num2[2] = (l_ncm2%10000)/1000+'0';
num2[3] = (l_ncm2%1000)/100+'0';
num2[4] = (l_ncm2%100)/10+'0';
num2[6] = l_ncm2%10+'0';
}
else
{
num2[0] = '-';
num2[1] = l_ncm2/10000+'0';
num2[2] = (l_ncm2%10000)/1000+'0';
num2[3] = (l_ncm2%1000)/100+'0';
num2[4] = (l_ncm2%100)/10+'0';
num2[6] = l_ncm2%10+'0';
} // printf("%s \n",num1);
// printf("%s \n",num2); Show_RGB(0,72,0,8,White);
Show_RGB(LCDRight-80,LCDRight,0,8,White);
LCD_PutString(0,0,num1,Blue,White);
LCD_PutString(LCDRight-80,0,num2,Blue,White); }
电赛总结(二)——AD芯片总结之AD7705的更多相关文章
- 电赛总结(二)——AD芯片总结之音频处理芯片ADC8009
一.特性参数 1.专门用来用音频处理的AD芯片 2.内部固定好8K的采样速率 3.8位AD芯片 二.内部结构图 三.芯片管脚图 四.管脚功能说明 管脚名称 功能 IN0~IN7 数据输入端 ABC 数 ...
- 电赛总结(二)——AD芯片总结之高速AD9224
一.特性参数 1.12位高速AD 2.高达40MSPS的高速AD芯片 3.噪声小 二.芯片管脚图 三.管脚功能说明 管脚名称 功能 CLK 参考时钟输入端 BIT12-1 数据输出端(1是低位,12是 ...
- 电赛总结(四)——波形发生芯片总结之AD9834
一.特性参数 1.2.3V~5.5V供电 2.输出频率高达37.5MHz 3.正弦波.三角波输出 4.提供相位调制和频率调制功能 5.除非另有说明,VDD = 2.3 V至5.5 V,AGND = D ...
- TI MSP430工程配置及2019年电赛A题编程示例(使用430 F5529)
配置 第一步:右击工程,选择Options 第二步:在General Options的Target选项卡里选择对应的器件Device,这里是MSP430G2231 第三步:在Debugger里选择FE ...
- 【系列】关于NJUPT电赛自控方向第一次积分赛的总结
本人是NJUPT电子科学与技术专业大一摸鱼狗一枚.本博客旨在总结与分享个人准备电赛所学知识,同时也是为了防止遗忘,锻炼写文章的能力.目前电赛方向为自控方向.主要研究方向为单片机.图像处理.自动控制相关 ...
- AD芯片的基准参考电压问题
基准参考电压的精度一般非常高的! AD芯片 : AD9226的基准参考电压 误差一般是 千分之一! 我之前用万用表测量AD9226的参考电压大概是1.89V(这款AD的正确参考电压应该是2V),所 ...
- [2018冬令营模拟测试赛(二十一)]Problem A: Decalcomania
[2018冬令营模拟测试赛(二十一)]Problem A: Decalcomania 试题描述 输入 见"试题描述" 输出 见"试题描述" 输入示例 见&quo ...
- noip2019集训测试赛(二十一)Problem B: 红蓝树
noip2019集训测试赛(二十一)Problem B: 红蓝树 Description 有一棵N个点,顶点标号为1到N的树.N−1条边中的第i条边连接顶点ai和bi.每条边在初始时被染成蓝色.高桥君 ...
- 通过Dapr实现一个简单的基于.net的微服务电商系统(二)——通讯框架讲解
首先感谢张队@geffzhang公众号转发了上一篇文章,希望广大.neter多多推广dapr,让云原生更快更好的在.net这片土地上落地生根. 目录:一.通过Dapr实现一个简单的基于.net的微服务 ...
随机推荐
- 基础知识系列☞GET和POST→及相关知识
参考资料: [1].<IT企业必读的200个.Net面试题> [2].http://www.cnblogs.com/hyddd/archive/2009/03/31/1426026.htm ...
- zoj.3865.Superbot(bfs + 多维dp)
Superbot Time Limit: 2 Seconds Memory Limit: 65536 KB Superbot is an interesting game which you ...
- Zookeeper Invalid config, exiting abnormally
Zookeeper Invalid config, exiting abnormally 出现 Invalid config, exiting abnormally 的情况可能有3个: 是否开 ...
- FTP服务器常规操作
导读 FTP协议是Internet文件传输的基础,它是由一系列规格说明文档组成,目标是提高文件的共享性,提供非直接使用远程计算机,使存储介质对用户透明和可靠高效地传送数据.下面就由我给大家简单介绍一下 ...
- unity3d进行脚本资源打包加载
原地址:http://www.cnblogs.com/hisiqi/p/3204752.html 本文记录如何通过unity3d进行脚本资源打包加载 1.创建TestDll.cs文件 public c ...
- [另开新坑] 算导v3 #26 最大流 翻译
26 最大流 就像我们可以对一个路网构建一个有向图求最短路一样,我们也可以将一个有向图看成是一个"流量网络(flow network)",用它来回答关于流的问题. Just as ...
- Python爬虫经验
有时候读取同一个url,服务器可能会返回不同的response,并不是爬虫程序代码的问题,而是服务器的问题,初次试验request时,最好 把response文本保存在一个txt文件当中,以便后续的比 ...
- nginx 反向代理 google
nginx的反向代理,google一直都是不容易打开的,如果你有一台位于国外的vps或者服务器,就可以轻松解决这个问题,这次的主角是nginx,nginx的反向代理现在已经发展很强大了,很多时候拿他来 ...
- C 结构体小结
看了三天结构体,是时候总结一下了. 关于结构体的声明: struct Student { ]; char sex; int age; ]; }; /*然后定义一个Student 类型的 student ...
- TortoiseSVN中图标的含义
今天在使用svn时发现有好多不认识了,所以查了下svn帮助手册.借此总结了下 svn 中图标的含义 一个新检出的工作复本使用绿色的勾做重载.表示Subversion状态 正常. 在开始编辑一个文件后, ...