浅谈Tarjan算法
预备知识
设无向图$G_{0} = (V_{0}, E_{0})$,其中$V_{0}$为定点集合,$E_{0}$为边集,设有向图$G_{1} = (V_{1}, E_{1})$,其中$V_{1}$为定点集合,$E_{1}$为边集。
- 无向图中的路径:如果存在一个顶点序列$v_{p},v_{i_{1}},\cdots,v_{i_{k}},v_{q}$,使得$\left ( v_{p}, v_{i_{1}} \right ),\left ( v_{i_{1}},v_{i_{2}} \right ),\cdots,\left ( v_{k-1}, v_{k} \right ),\left ( v_{k}, v_{q} \right )\in E_{0}$,那么称$v_{p}$到$v_{q}$之间存在一条路径。
- 有向图中的路径:如果存在一个顶点序列$v_{p},v_{i_{1}},\cdots,v_{i_{k}},v_{q}$,使得$\left ( v_{p}, v_{i_{1}} \right ),\left ( v_{i_{1}},v_{i_{2}} \right ),\cdots,\left ( v_{k-1}, v_{k} \right ),\left ( v_{k}, v_{q} \right )\in E_{1}$,那么称$v_{p}$到$v_{q}$之间存在一条路径。
- 连通图:在无向图中,对于任意有序对$\left ( v_{i},v_{j} \right )\in(V_{0}\times V_{0})$,都存在一条$v_{i}$到$v_{j}$的路径。
- 强连通图:在有向图中,对于任意有序对$\left ( v_{i},v_{j} \right )\in(V_{1}\times V_{1})$,都存在一条$v_{i}$到$v_{j}$的路径。
- 连通分量:无向图$G$的极大连通子图是$G$的连通分量。
- 强连通分量:有向图$G$的极大强连通子图是$G$的强连通分量。
- 割点:在无向图$G$中,如果存在点$v_{0}$满足删除它后,新图的连通分量的个数增加,那么$v_{0}$为原图的一个割点。
- 割边(又称为桥):在无向图$G$中,如果存在边$e_{0}$满足删除它后,新图的连通分量的个数增加,那么$e_{0}$为原图的一条割边。
- 边-双连通图:若无向连通图$G$中不存在割边,则无向图$G$是边-双连通图
- 点-双连通图:若无向连通图$G$中不存在割点,则无向图$G$是点-双连通图
- 点-双连通分量:无向图$G$中的极大点-双连通子图是它的点-双连通分量
- 边-双连通分量:无向图$G$中的极大边-双连通子图是它的边-双连通分量
两个数组
$dfn_i$:点$i$的深度优先数(英文可能是Depth First Number),可以理解为是第几个被搜索到的节点。
$low_i$:在点$i$的dfs子树中通过1条返祖边到达的最早祖先。
Tarjan算法首先会对原图进行深度优先搜索。
当从一个访问过的点通过边$e$到达一个未访问的点,则将边$e$标记为树边。如果一条非树边$(u, v)$使得要么$u$是$v$的祖先满足,要么$v$是$u$的祖先,那么称边$(u, v)$是一条返祖边。
显然当遇到一条返祖边时,需要用它来更新当前点的$low$值
通过Tarjan算法得到的生成森林是dfs生成森林:
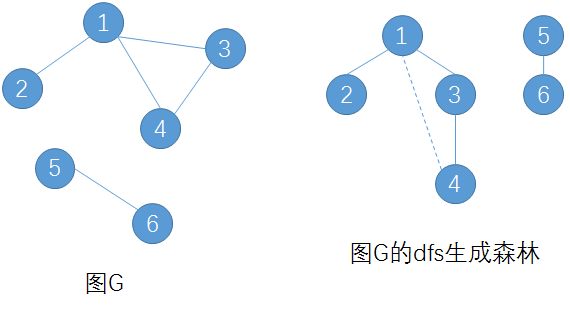
(其中虚边是返祖边)
Tarjan算法的应用
求割点和割边
首先给出一个结论
定理1 无向图中的每一条边,要么是树边,要么是返祖边。
证明 假如存在其他边,它满足它不连它的祖先也不连它的后代,那么它一定是满足:
然后根据dfs的性质和无向边的性质,容易得到不存在这种情况。
假如现在考虑点$p$是不是割点,分两种情况讨论:
- 如果$p$是树根,那么只要$p$的子节点个数大于1,那么$p$就是割点。因为$p$不存在祖先,点$p$的不同子树中的两点之间的路径必须经过点1(因为根节点的位于它不同子树内的两点的LCA是根节点,然后根据定理1得到,从其中一个点开始走,经过的每一条边要么到它的后代要么到它的祖先,所以必定经过1)。
- 如果$p$不是树根,那么只要存在一个子节点$x$满足$low_x \geqslant dfn_p$,那么点$p$是割点。因为假如点$p$被删掉后,点$x$无法到达$p$的祖先,而这之前是可以到达的,所以连通分量的个数至少增加了1.
Code
/**
* poj
* Problem#1144
* Accepted
* Time: 16ms
* Memory: 672k
*/
#include <algorithm>
#include <iostream>
#include <cstring>
#include <cstdio>
#include <vector>
using namespace std;
typedef bool boolean; const int N = ; int n;
int cnt, res;
int dfn[N], low[N];
boolean vis[N];
vector<int> g[N]; inline boolean init() {
scanf("%d", &n);
if (!n) return false;
for (int i = ; i <= n; i++)
g[i].clear();
int u, v;
while (~scanf("%d", &u) && u) {
while (getchar() != '\n') {
scanf("%d", &v);
g[u].push_back(v);
g[v].push_back(u);
}
}
return true;
} void tarjan(int p, int fa) {
int cson = ;
dfn[p] = low[p] = ++cnt;
vis[p] = true;
for (int i = ; i < (signed)g[p].size(); i++) {
int e = g[p][i];
if (e == fa) continue;
if (!vis[e]) {
tarjan(e, p);
low[p] = min(low[p], low[e]);
if (low[e] >= dfn[p])
cson++;
} else
low[p] = min(low[p], dfn[e]);
}
if ((!fa && cson > ) || (fa && cson))
res++;
} inline void solve() {
cnt = , res = ;
memset(vis, false, sizeof(boolean) * (n + ));
for (int i = ; i <= n; i++)
if (!vis[i])
tarjan(i, );
printf("%d\n", res);
} int main() {
while (init()) {
solve();
}
return ;
}
Cut Vectex
求桥的话,相对就简单一些。
一个非常显然的结论:
定理2 返祖边不可能是桥。
证明 因为返祖边的两端一定通过树边连通。所以删掉返祖边不会改变图的连通性。
因此割边的个数不会超过$n - 1$(一个显然,但没多大用的性质)。
我更想说的是,再根据定理1可以得到桥一定是树边。
考虑什么样的树边被断掉后图的连通分量的个数增加。假如这条树边两端的点是$u, v$,其中$u$是$v$的爸爸父节点。删掉边$(u, v)$后,连通分量个数增加的充分必要条件是$v$无法通过返祖边到达$u$或者$u$的祖先。因此,不难得到条件是$low_v = dfn_v$。
Code
/**
* hdu
* Problem#4738
* Accepted
* Time: 187ms
* Memory: 25264k
*/
#include <iostream>
#include <cstring>
#include <cstdio>
using namespace std;
typedef bool boolean; const int N = , M = 2e6 + ; typedef class Edge {
public:
int end;
int next;
int w; Edge(int end = , int next = , int w = ):end(end), next(next), w(w) { }
}Edge; typedef class MapManager {
public:
int ce;
int h[N];
Edge es[M]; void addEdge(int u, int v, int w) {
es[++ce] = Edge(v, h[u], w);
h[u] = ce;
} void addDoubleEdge(int u, int v, int w) {
addEdge(u, v, w);
addEdge(v, u, w);
} Edge& operator [] (int p) {
return es[p];
}
}MapManager; int n, m;
int cnt, res;
int dfn[N], low[N];
boolean vis[N];
MapManager g; inline boolean init() {
scanf("%d%d", &n, &m);
if (!n && !m)
return false;
g.ce = -;
memset(g.h, -, sizeof(int) * (n + ));
for (int i = , u, v, w; i <= m; i++) {
scanf("%d%d%d", &u, &v, &w);
g.addDoubleEdge(u, v, w);
}
return true;
} void tarjan(int p, int laste) {
dfn[p] = low[p] = ++cnt;
vis[p] = true;
for (int i = g.h[p]; ~i; i = g[i].next) {
int e = g[i].end, w = g[i].w;
if (i == laste) continue;
if (!vis[e]) {
tarjan(e, i ^ );
low[p] = min(low[p], low[e]);
if (low[e] == dfn[e])
res = min(res, w);
} else
low[p] = min(low[p], dfn[e]);
}
} inline void solve() {
cnt = , res = ;
memset(vis, false, sizeof(boolean) * (n + ));
tarjan(, -);
if (!res) res = ; // 坑....
for (int i = ; i <= n; i++)
if (!vis[i]) {
res = ;
break;
}
if (res == ) res = -;
printf("%d\n", res);
} int main() {
while (init())
solve();
return ;
}
Cut Edge
求点-双连通分量
在求点-双连通分量(以下简称为点双)之前,我们再来证明一个东西:
定理3 每条边恰好属于一个点双。
证明 首先来说明每条边一定属于一个点双连通子图。考虑这条边的两个端点以及它本身构成的子图,显然它是点双连通的。
然后来说明任意两个点双没有公共边。
假设存在两个点双有一条公共边$(u, v)$,假设它们的点集分别为$V_1, V_2$。如果删掉的点$x\in V_1$或$x\in V_2$,且$x\neq u, x\neq v$,根据点双的定义容易得到新图的连通性不会改变。如果删掉的点是$u$,那么剩余的点一定与$v$连通,所以它仍然不会改变图的连通性。对于如果删掉的点是$v$同理可证不会改变新图的连通性。所以删掉$V_1 \cup V_2$中任意一个点都不会改变图的连通性。因此它们能够组成更大的一个点双连通子图,与点双的定义矛盾。
由这个证明过程不难得到点双的点集大小至少为2,所以在考虑找到所有点双的时候可以考虑边。
定理4 每个点双包含至少一条树边。
证明 假设存在一个点双不包含任意一条树边。我们考虑从这个点双中选取2个不同点$u, v$,它们在dfs生成树上存在唯一一条路径。我们把它加入这个点双中,如果删掉非路径上的点,那么剩余点与$u, v$连通。如果删掉的是$u$或者$v$,那么剩下点会与另外一个点连通。如果删掉的是路径上的一个点(不含端点),那么路径上一部分点会与$u$连通,另一部分与$v$,$u, v$和原点双中的点一定连通。所以新子图还是一个点双连通子图,与点双的定义矛盾。
所以点双的数量不会超过$n - 1$。
我们考虑在回溯的时候找到一个点双。
考虑判断一条树边是不是一个点双内的树边中深度最低的一条边。假设它深度较深的一端是$v$,较浅的一端是$u$。那么当$v$无法连向$u$的祖先的时候,加入$u$后再加入另一条与$u$连通的树边,那么删掉$u$后就会多产生连通块,所以当$low_v \geqslant dfn_u$的时候,这条边是这个点双内的最后一条边。
如果需要求出点双内的所有点和所有边可以用一个栈记录一下边。
注意一下返祖边只在子节点的时候加入,这个可以通过判断深度优先数的大小解决掉(你一定也不希望在其他某个点双内莫名其妙多出一条边)。
Code
/**
* poj
* Problem#2942
* Accepted
* Time: 1063ms
* Memory: 1128k
*/
#include <iostream>
#include <cstdlib>
#include <cstdio>
#include <vector>
#include <stack>
using namespace std;
typedef bool boolean; template <typename T>
void pfill(T* pst, const T* ped, T val) {
for ( ; pst != ped; *(pst++) = val);
} const int N = 1e3 + , M = (N * N) << ; typedef class Edge {
public:
int ed, nx; Edge(int ed = , int nx = ):ed(ed), nx(nx) { }
}Edge; typedef class MapManager {
public:
int h[N];
vector<Edge> es; void addEdge(int u, int v) {
es.push_back(Edge(v, h[u]));
h[u] = (signed) es.size() - ;
} Edge& operator [] (int p) {
return es[p];
}
}MapManager; #define pii pair<int, int> int n, m;
int col[N];
stack<pii> s;
MapManager g;
int dfs_clock;
boolean res[N];
MapManager subg;
boolean rg[N][N];
int dfn[N], low[N];
vector<int> bpoints; inline boolean init() {
scanf("%d%d", &n, &m);
if (!n && !m)
return false;
g.es.clear();
dfs_clock = ;
pfill(dfn, dfn + n + , );
pfill(col, col + n + , -);
pfill(g.h, g.h + n + , -);
pfill(res, res + n + , false);
pfill(subg.h, subg.h + n + , -);
for (int i = ; i <= n; i++)
for (int j = ; j <= n; j++)
rg[i][j] = false;
for (int i = , u, v; i <= m; i++) {
scanf("%d%d", &u, &v);
rg[u][v] = rg[v][u] = true;
}
return true;
} boolean color(int p, int c) {
if (~col[p])
return col[p] == c;
col[p] = c;
for (int i = subg.h[p]; ~i; i = subg[i].nx)
if (!color(subg[i].ed, col[p] ^ ))
return false;
return true;
} void dispose() {
if (!color(bpoints[], )) {
for (unsigned i = ; i < bpoints.size(); i++)
res[bpoints[i]] = true;
}
for (unsigned i = ; i < bpoints.size(); i++)
subg.h[bpoints[i]] = -, col[bpoints[i]] = -;
subg.es.clear();
bpoints.clear();
} void tarjan(int p, int last_edge) {
dfn[p] = low[p] = ++dfs_clock; pii now, cur;
for (int i = g.h[p], e; ~i; i = g[i].nx) {
e = g[i].ed;
if (i == (last_edge ^ ))
continue;
now = pii(min(p, e), max(p, e));
if (!dfn[e]) {
s.push(now);
tarjan(e, i);
low[p] = min(low[p], low[e]);
if (low[e] >= dfn[p]) {
do {
cur = s.top();
s.pop();
subg.addEdge(cur.first, cur.second);
subg.addEdge(cur.second, cur.first);
bpoints.push_back(cur.first);
bpoints.push_back(cur.second);
} while (now != cur);
dispose();
}
} else {
low[p] = min(low[p], dfn[e]);
if (dfn[e] < dfn[p])
s.push(pii(min(p, e), max(p, e)));
}
}
} inline void solve() {
for (int i = ; i <= n; i++)
for (int j = i + ; j <= n; j++)
if (!rg[i][j]) {
g.addEdge(i, j);
g.addEdge(j, i);
} for (int i = ; i <= n; i++)
if (!dfn[i])
tarjan(i, -); int answer = ;
for (int i = ; i <= n; i++)
answer += !res[i];
printf("%d\n", answer);
} int main() {
while (init())
solve();
return ;
}
Vertex Biconnected Component
有时候我们希望求出点双内的点,这个时候栈内记录边略显得麻烦,可以考虑找到一个点的时候加入一个点,它在找到包含它到它的父节点的那条树边的点双时被弹出栈。具体细节可以见代码。
Code
/**
* loj
* Problem#2562
* Accepted
* Time: 2431ms
* Memory: 21964k
*/
#include <bits/stdc++.h>
using namespace std;
typedef bool boolean; const int N = 1e5 + 5, N2 = N << 1; template <typename T>
void pfill(T* pst, const T* ped, T val) {
for ( ; pst != ped; *(pst++) = val);
} typedef class Edge {
public:
int ed, nx; Edge() { }
Edge(int ed, int nx) : ed(ed), nx(nx) { }
} Edge; typedef class MapManager {
public:
int h[N << 1];
vector<Edge> es; void init(int n) {
pfill(h + 1, h + n + 1, -1);
es.clear();
} void add_edge(int u, int v) {
es.emplace_back(v, h[u]);
h[u] = (signed) es.size() - 1;
}
Edge& operator [] (int p) {
return es[p];
}
} MapManager; int Case;
int n, m;
MapManager G, Tr; int cnt_node, dfs_clock;
int value[N2]; inline void init() {
scanf("%d%d", &n, &m);
G.init(n);
Tr.init(n << 1);
cnt_node = n;
pfill(value + 1, value + n + 1, 1);
for (int i = 1, u, v; i <= m; i++) {
scanf("%d%d", &u, &v);
G.add_edge(u, v);
G.add_edge(v, u);
}
} stack<int> S;
boolean vis[N];
int dfn[N], low[N]; void init_tarjan() {
dfs_clock = 0;
while (!S.empty()) S.pop();
pfill(vis + 1, vis + n + 1, false);
}
void Tarjan(int p) {
S.push(p);
vis[p] = true;
dfn[p] = low[p] = ++dfs_clock;
for (int i = G.h[p], e; ~i; i = G[i].nx) {
e = G[i].ed;
if (!vis[e]) {
Tarjan(e);
low[p] = min(low[p], low[e]);
if (low[e] >= dfn[p]) {
int now = -1, id = ++cnt_node;
value[id] = 0;
do {
now = S.top();
S.pop();
Tr.add_edge(id, now);
Tr.add_edge(now, id);
} while (now != e);
Tr.add_edge(id, p);
Tr.add_edge(p, id);
}
} else {
low[p] = min(low[p], dfn[e]);
}
}
} int sz[N2], zson[N2], dep[N2];
int in[N2], top[N2], fa[N2]; void dfs1(int p, int Fa) {
int mx = -1, &id = zson[p];
sz[p] = 1, fa[p] = Fa;
value[p] += value[Fa], dep[p] = dep[Fa] + 1, id = -1;
for (int i = Tr.h[p], e; ~i; i = Tr[i].nx) {
e = Tr[i].ed;
if (e ^ Fa) {
dfs1(e, p);
sz[p] += sz[e];
if (sz[e] > mx) {
mx = sz[e];
id = e;
}
}
}
} void dfs2(int p, boolean ontop) {
in[p] = ++dfs_clock;
top[p] = (!ontop) ? (top[fa[p]]) : (p);
if (~zson[p]) {
dfs2(zson[p], false);
}
for (int i = Tr.h[p], e; ~i; i = Tr[i].nx) {
e = Tr[i].ed;
if (e != fa[p] && e != zson[p]) {
dfs2(e, p);
}
}
} int lca(int u, int v) {
while (top[u] != top[v]) {
if (dep[top[u]] < dep[top[v]]) {
swap(u, v);
}
u = fa[top[u]];
}
return (dep[u] < dep[v]) ? (u) : (v);
} inline void solve() {
static int S[N2]; init_tarjan();
Tarjan(1); dfs_clock = 0;
dfs1(1, 0);
dfs2(1, true); int Q, K;
scanf("%d", &Q);
while (Q--) {
scanf("%d", &K);
for (int i = 1; i <= K; i++) {
scanf("%d", S + i);
} sort(S + 1, S + K + 1, [&] (const int& u, const int& v) {
return in[u] < in[v];
});
int vd = value[fa[lca(S[1], S[K])]];
int ans = value[S[1]] - vd, g;
for (int i = 1; i < K; i++) {
g = lca(S[i], S[i + 1]);
ans += value[S[i + 1]] - value[g];
}
printf("%d\n", ans - K);
}
} int main() {
scanf("%d", &Case);
while (Case--) {
init();
solve();
}
return 0;
}
然后有一个比较常用的性质:
性质1 点双内任意两个不同点$u, v$之间存在两条公共点只有$u, v$的路径。
证明 如果存在两个点$u, v$之间不存在2条公共点只有$u, v$的路径。
考虑如果$u, v$之间只存在1条路径,那么删掉这条路径中除去$u, v$外任意一点都会使得图不连通。
否则考虑证明存在一个必经点。
如果存在2条路径,那么任取一个$u, v$外的一个公共点就是必经点
假设存在3条路径,它们两两在$u, v$外
-->
求边-双连通分量
(下面将边-双连通分量简写为边双)
和点双类似,只不过这次我们考虑顶点:
定理5 每个顶点恰好属于一个边双。
证明 首先一个点的图是边双。
假设存在两个边双存在一个公共点$x$,那么删掉一条边都不会改变$x$和剩下的点的连通性。
我们考虑一个点是不是边双中的最浅的一个点。如果$dfn_p = low_p$,那么再加入它的某个父节点,那么它将成为割点。
如果需要求出边双内的所有点再用一个栈记录一下点就好了。
似乎还有一种做法是边双内一定不包含原图的桥,因此我们找到所有的桥,把它们删掉就得到了所有边双了。这个条件只是必要性,它的充分性可以考虑如果它删掉后使得连通块个数增加,那么它一定是原图的桥。(它是原图的一个子图,那么再加入若干端点都在它内部边后不会使得它的边连通性降低)。
Code
/**
* poj
* Problem#3177
* Accepted
* Time: 47ms
* Memory: 744k
*/
#include <iostream>
#include <cstdlib>
#include <cstdio>
#include <vector>
#include <stack>
using namespace std;
typedef bool boolean; template <typename T>
void pfill(T* pst, const T* ped, T val) {
for ( ; pst != ped; *(pst++) = val);
} const int N = 5e3 + , M = N << ; typedef class Edge {
public:
int ed, nx; Edge(int ed = , int nx = ):ed(ed), nx(nx) { }
}Edge; typedef class MapManager {
public:
int* h;
vector<Edge> es; MapManager() { }
MapManager(int n) {
h = new int[(n + )];
pfill(h + , h + n + , -);
} void addEdge(int u, int v) {
es.push_back(Edge(v, h[u]));
h[u] = (signed) es.size() - ;
} Edge& operator [] (int p) {
return es[p];
}
}MapManager; int n, m;
int deg[N];
MapManager g;
stack<int> s;
int dfs_clock;
int dfn[N], low[N];
pair<int, int> es[M]; inline void init() {
scanf("%d%d", &n, &m);
g = MapManager(n);
for (int i = , u, v; i <= m; i++) {
scanf("%d%d", &u, &v);
g.addEdge(u, v);
g.addEdge(v, u);
es[i] = pair<int, int>(u, v);
}
} void tarjan(int p, int last_edge) {
dfn[p] = low[p] = ++dfs_clock;
s.push(p);
for (int i = g.h[p], e; ~i; i = g[i].nx) {
e = g[i].ed;
if (i == (last_edge ^ ))
continue;
if (!dfn[e]) {
tarjan(e, i);
low[p] = min(low[p], low[e]);
} else
low[p] = min(low[p], dfn[e]);
} if (low[p] == dfn[p]) {
int cur;
do {
cur = s.top();
s.pop();
low[cur] = low[p];
} while (cur != p);
}
} inline void solve() {
for (int i = ; i <= n; i++)
if (!dfn[i])
tarjan(i, -);
for (int i = ; i <= m; i++) {
int u = es[i].first, v = es[i].second;
if (low[u] != low[v])
deg[low[u]]++, deg[low[v]]++;
} int cnt_leaf = ;
for (int i = ; i <= n; i++)
if (dfn[i] == low[i] && deg[low[i]] == )
cnt_leaf++;
printf("%d\n", (cnt_leaf + ) >> );
} int main() {
init();
solve();
return ;
}
Edge Biconnected Component
求强连通分量
有向图稍微要麻烦一点,不过基本思想还是一样的。
仍然考虑有向图的dfs生成森林,$dfn$数组以及$low$数组。
但是有向图中生成森林会复杂许多:
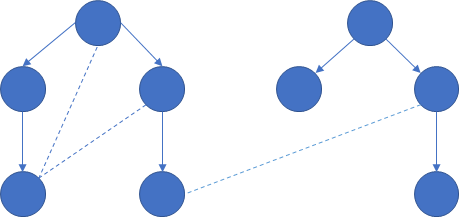
在更新$low$的时候要注意两个点是否在同一个子树内。
不难注意到一个强连通分量一定是某一个dfs子树内,所以我们仍然考虑一个强连通分量内的最浅点。
不难得到它的充分必要条件时$dfn_u = low_u$。必要性是因为,如果它能够到达它的若干级祖先,那么这一条链再加上这一条返祖边就能得到一个强连通子图,充分性显然,因为它自己就能构成一个强连通子图。
我们用类似于求边双的方法,就可以求出每个强连通分量内的所有点。
/**
* hdu
* Problem#1269
* Accepted
* Time: 46ms
* Memory: 3944k
*/
#include <iostream>
#include <cstdlib>
#include <cstdio>
#include <vector>
#include <stack>
using namespace std;
typedef bool boolean; template <typename T>
void pfill(T* pst, const T* ped, T val) {
for ( ; pst != ped; *(pst++) = val);
} const int N = 1e4 + ; typedef class Edge {
public:
int ed, nx; Edge(int ed = , int nx = ):ed(ed), nx(nx) { }
}Edge; typedef class MapManager {
public:
int h[N];
vector<Edge> es; void addEdge(int u, int v) {
es.push_back(Edge(v, h[u]));
h[u] = (signed) es.size() - ;
} Edge& operator [] (int p) {
return es[p];
}
}MapManager; #define pii pair<int, int> int n, m;
MapManager g;
stack<int> s;
int dfs_clock;
int dfn[N], low[N];
boolean instack[N]; inline boolean init() {
scanf("%d%d", &n, &m);
if (!n && !m)
return false;
g.es.clear();
dfs_clock = ;
pfill(dfn, dfn + n + , );
pfill(g.h, g.h + n + , -);
for (int i = , u, v; i <= m; i++) {
scanf("%d%d", &u, &v);
g.addEdge(u, v);
}
return true;
} int cnt_scc = ;
void tarjan(int p) {
dfn[p] = low[p] = ++dfs_clock;
instack[p] = true;
s.push(p);
for (int i = g.h[p], e; ~i; i = g[i].nx) {
e = g[i].ed;
if (!dfn[e]) {
tarjan(e);
low[p] = min(low[e], low[p]);
} else if (instack[e])
low[p] = min(dfn[e], low[p]);
} if (low[p] == dfn[p]) {
int cur;
do {
cur = s.top();
s.pop();
instack[cur] = false;
} while (cur != p);
cnt_scc++;
}
} inline void solve() {
cnt_scc = ;
for (int i = ; i <= n; i++)
if (!dfn[i])
tarjan(i);
puts((cnt_scc == ) ? ("Yes") : ("No"));
} int main() {
while (init())
solve();
return ;
}
Strongly Conneceted Component
浅谈Tarjan算法的更多相关文章
- 浅谈Tarjan算法及思想
在有向图G中,如果两个顶点间至少存在一条路径,称两个顶点强连通(strongly connected).如果有向图G的每两个顶点都强连通,称G是一个强连通图.非强连通图有向图的极大强连通子图,称为强连 ...
- 浅谈 Tarjan 算法
目录 简述 作用 Tarjan 算法 原理 出场人物 图示 代码实现 例题 例题一 例题二 例题三 例题四 例题五 总结 简述 对于初学 Tarjan 的你来说,肯定和我一开始学 Tarjan 一样无 ...
- 浅谈 Tarjan 算法之强连通分量(危
引子 果然老师们都只看标签拉题... 2020.8.19新初二的题集中出现了一道题目(现已除名),叫做Running In The Sky. OJ上叫绮丽的天空 发现需要处理环,然后通过一些神奇的渠道 ...
- 浅谈分词算法(5)基于字的分词方法(bi-LSTM)
目录 前言 目录 循环神经网络 基于LSTM的分词 Embedding 数据预处理 模型 如何添加用户词典 前言 很早便规划的浅谈分词算法,总共分为了五个部分,想聊聊自己在各种场景中使用到的分词方法做 ...
- 浅谈分词算法(4)基于字的分词方法(CRF)
目录 前言 目录 条件随机场(conditional random field CRF) 核心点 线性链条件随机场 简化形式 CRF分词 CRF VS HMM 代码实现 训练代码 实验结果 参考文献 ...
- 浅谈分词算法(3)基于字的分词方法(HMM)
目录 前言 目录 隐马尔可夫模型(Hidden Markov Model,HMM) HMM分词 两个假设 Viterbi算法 代码实现 实现效果 完整代码 参考文献 前言 在浅谈分词算法(1)分词中的 ...
- 浅谈分词算法基于字的分词方法(HMM)
前言 在浅谈分词算法(1)分词中的基本问题我们讨论过基于词典的分词和基于字的分词两大类,在浅谈分词算法(2)基于词典的分词方法文中我们利用n-gram实现了基于词典的分词方法.在(1)中,我们也讨论了 ...
- 浅谈Manacher算法与扩展KMP之间的联系
首先,在谈到Manacher算法之前,我们先来看一个小问题:给定一个字符串S,求该字符串的最长回文子串的长度.对于该问题的求解.网上解法颇多.时间复杂度也不尽同样,这里列述几种常见的解法. 解法一 ...
- 浅谈KMP算法及其next[]数组
KMP算法是众多优秀的模式串匹配算法中较早诞生的一个,也是相对最为人所知的一个. 算法实现简单,运行效率高,时间复杂度为O(n+m)(n和m分别为目标串和模式串的长度) 当字符串长度和字符集大小的比值 ...
随机推荐
- NetBeans配置subli
NetBeans主题设置: ①.去https://netbeansthemes.com/rank/网址下载喜欢的主题 ②.然后打开NetBeans-->工具->选项->外观-> ...
- Mac上配置GTK环境
Mac上配置GTK环境 安装command line工具, 如果安装了Xcode, 就直接跳过该步骤 安装Homebrew 使用brew install pkg-config 使用brew insta ...
- LINUX 配置定时任务,每天凌晨1点定时备份数据库
一.安装定时任务如果本地没有安装包,在能够连网的情况下可以在线安装 yum install vixie-cronyum install crontabs 查看crond服务是否运行: pgrep cr ...
- spring-boot mybatis配置
接着我们的spring boot项目,spring boot如何使用mybatis访问数据库呢? 个人习惯使用mapper接口和xml配置sql,从pom.xml入手 1.1 添加依赖 <dep ...
- Linux 下如何修改用户名(同时修改用户组名和家目录)
有时候,由于某些原因,我们可能会需要重命名用户名.我们可以很容易地修改用户名以及对应的家目录和 UID.-- Shusain 本文导航◈ 修改用户名12%◈ 修改家目录43%◈ 更改用户 UID52% ...
- linux 返回上次历史目录
我们使用linux的转换目录命令 cd 时经常会遇到想回到cd之前目录的情况,比如不小心按了 cd 回车,跳出了工作目录,又想回到刚刚的目录. 这种情况下,就用到了我们这篇博客的主角 cd - . c ...
- Spring Boot入门 and Spring Boot与ActiveMQ整合
1.Spring Boot入门 1.1什么是Spring Boot Spring 诞生时是 Java 企业版(Java Enterprise Edition,JEE,也称 J2EE)的轻量级代替品.无 ...
- HDU 2196树形DP(2个方向)
HDU 2196 [题目链接]HDU 2196 [题目类型]树形DP(2个方向) &题意: 题意是求树中每个点到所有叶子节点的距离的最大值是多少. &题解: 2次dfs,先把子树的最大 ...
- centos7.2 Apache+PHP7.2+Mysql5.6环境搭建
yum安装PHP7.2 由于linux的yum源不存在php7.x,所以我们要更改yum源:rpm -Uvh https://dl.fedoraproject.org/pub/epel/epel-re ...
- Haproxy小酌
1.Haproxy简介 负载均衡: 基于软件:HAProxy(四层+七层),Nginx(七层) 基于操作系统:LVS(四层) 作用:实现高可用,负载均衡,基于TCP(第四层)和HTTP(第七层)的应用 ...