RepVGG
RepVGG: Making VGG-style ConvNets Great Again
作者:elfin
资料来源:RepVGG论文解析
1、摘要
我们提出了一种简单而强大的卷积神经网络结构,它具有类似VGG的推理结构,仅由3×3卷积和ReLU组成,而训练模型具有多分支拓扑结构。这种训练和推理结构的解耦是通过一种结构参数重构技术(structural re-parameterization)来实现的,因此该模型被命名为RepVGG。在ImageNet上,RepVGG达到了80%以上的top-1精度,据我们所知,这是第一次使用普通模型。在nvidia1080TI gpu上,RepVGG模型的运行速度比ResNet-50快83%,比ResNet-101快101%,精度更高,与EfficientNet和RegNet等最先进的模型相比,显示出良好的精度-速度折衷。
项目地址:https://github.com/megvii-model/RepVGG
pytorch版本:https://github.com/DingXiaoH/RepVGG
2、背景介绍
卷积神经网络(ConvNets)已成为解决许多问题的主流方法。VGG在图像识别方面取得了巨大的成功,但是它仅使用了一个由conv、ReLU和pooling组成的简单体系结构。随着Inception、ResNet和DenseNet的出现,许多研究兴趣转移到了设计良好的体系结构上,使得模型变得越来越复杂。最近一些强大的架构是通过自动或手动的架构搜索,或者在一个基本架构上搜索一个复合缩放策略来获得的。
虽然许多复杂的卷积网络比简单的卷积网络提供更高的精度,但缺点是显著的:
- (1) 复杂的多分支设计(如ResNet中的残差分支 和 Inception中的分支级联)使得模型难以实现和定制,降低了推理速度,降低了内存利用率。
- (2) 一些组件增加了内存访问成本,并且缺乏对各种设备的支持(例如,Xception和MobileNets 中的depthwise 以及ShuffleNets中的通道shuffle。
由于影响推理速度的因素很多,浮点运算(FLOPs)的数量并不能准确反映实际速度。尽管一些新的模型比老式的VGG和ResNet有更低的浮点运算,但是他们可以运行速度并不快。下表展示了运行速度的变换:
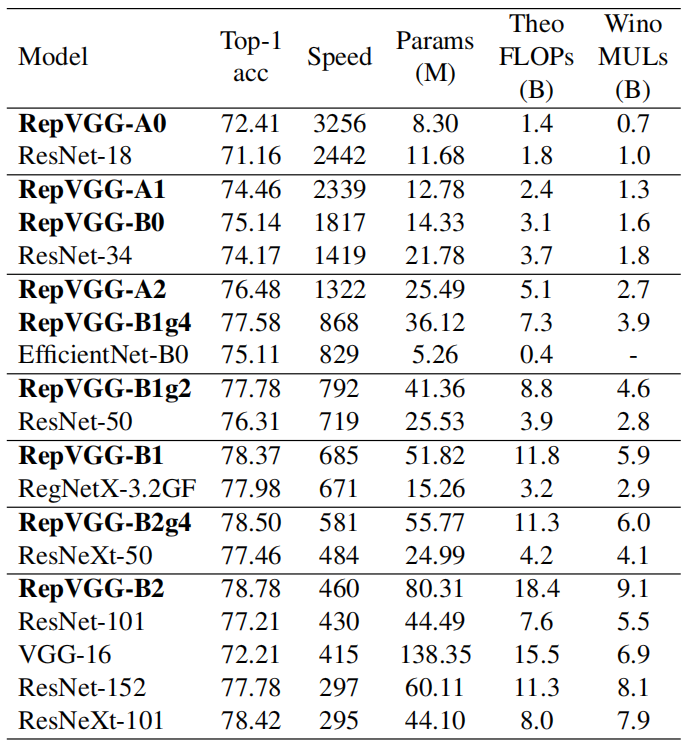
因此,VGG和ResNets的原始版本仍然大量用于学术界和工业界的实际应用。
在本文中,我们提出了RepVGG,这是一种VGG风格的结构,它优于许多复杂的模型,如图所示:

RepVGG的优点有:
- 该模型有一个类似VGG的拓扑结构,没有任何分支。也就是说,每一层都将其前一层的输出作为输入,并将输出输入到其后一层。
- 模型仅使用 \(3 \times 3\) 的卷积结构和\(ReLU\)激活。
- 具体的架构(包括特定的深度和层宽度)是没有自动搜索、手动细化、复合缩放,也没有其他繁重设计的实例化。
普通模型要达到与多分支体系结构相当的性能水平是一个挑战。一种解释是,多分支拓扑(例如ResNet)使模型成为许多较浅模型的隐式集合,因此训练多分支模型可以避免梯度消失问题。
由于多分支结构的优点都是用于训练,缺点是不希望用于推理,因此我们提出通过结构参数重构将训练多分支结构和推理结构解耦,即通过参数转换将结构从一个结构转换为另一个结构。具体而言,网络结构与一组参数耦合,例如,conv层由四阶核张量表示。如果某个结构的参数可以转换成另一个结构耦合的另一组参数,就可以等价地用后者代替前者,从而改变整个网络结构。
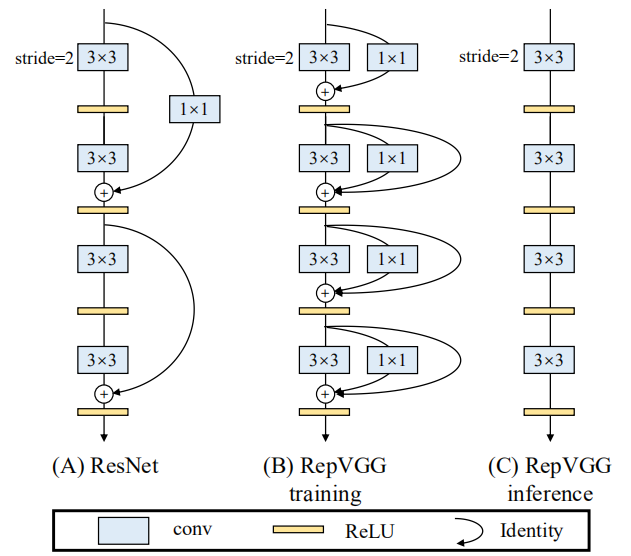
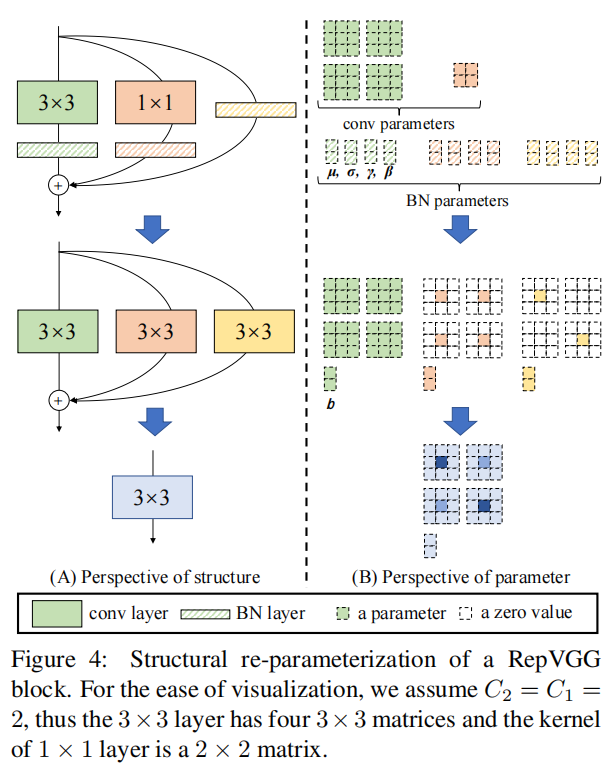
具体地说,我们使用identity和1×1分支构造RepVGG的训练结构,这是受ResNet启发的,但不同的方法是通过结构参数重构去除分支(如下图所示)。经过训练后,我们用简单代数进行变换,因为一个恒等分支可以看作退化的1×1变换,后者可以进一步看作退化的3×3变换,所以我们可以用原3×3核的训练参数构造一个3×3核,identity分支和1×1分支和批量规范化(BN)层。因此,转换后的模型是一个3×3 conv层的堆栈,可以保存以供测试和部署。
值得注意的是,RepVGG的推理主体只涉及一种操作类型:3×3 conv,然后是ReLU,这使得RepVGG在gpu等通用计算设备上运行得很快。更好的是,RepVGG允许专用硬件实现更高的速度,因为考虑到芯片大小和功耗,我们需要的操作类型越少,我们可以集成到芯片上的计算单元就越多。即,专门用于RepVGG的推理芯片可以具有大量的3×3-ReLU单元和更少的存储器单元(因为普通拓扑是存储器经济的,如图3所示)。我们的贡献总结如下:
- 我们提出了RepVGG,这是一种简单的体系结构,与现有技术相比,它具有良好的速度精度折衷。
- 我们提出使用结构参数重构来将训练多分支拓扑与推理结构解耦。
- 我们已经证明了RepVGG在图像分类和语义分割方面的有效性,以及它的效率和易实现性。
3、相关工作
3.1 单分支到多分支
VGG网络在ImgNet竞赛中获得最优的性能后,许多新的创新将其精确度进一步提高。如:GoogLeNet、Inception采用多分支结构; ResNet使用了简单的二分支结构;DenseNet通过连接低层和多个高层,使得拓扑结构更加复杂。神经结构搜索(NAS)和人工设计空间设计可以产生性能更高的网络,但代价是巨大的计算资源或人力。一些大版本的NAS生成模型甚至不能在普通gpu上训练,因此限制了其应用。除了实现的不便外,复杂模型也会降低并行度,从而降低推理速度。
3.2 单分支模型的高效训练
有人试图训练没有分支的网络。然而,以往的工作主要是为了使非常深的模型收敛到合理的精度,但并没有取得比复杂模型更好的性能。因此,这些方法和模型既不简单,也不实用。例如,提出了一种初始化方法来训练极深的平面网络。采用基于平均场理论的训练方案,在MNIST上训练了10000层网络,训练精度达到99%,在CIFAR-10上训练精度达到82%。尽管这些模型并不实用(即使LeNet-5在MNIST上的准确率也能达到99.3%,VGG-16在CIFAR-10上的准确率也能达到93%以上),但其理论贡献是深刻的。最近的一项工作[24]结合了几种技术,包括 Leaky ReLU、最大范数和谨慎初始化。在ImageNet上,一个具有147M参数的普通ConvNet可以达到74.6%的top-1精度,比其报告的基线(ResNet-101,76.6%,45M参数)低2%。值得注意的是,本文不仅证明了普通模型可以很好地收敛,而且不打算像resnet那样训练极深的convnet。相反,我们的目标是建立一个具有合理深度和良好精度-速度权衡的简单模型,该模型可以简单地用最常见的组件(如正则conv和BN)和简单代数实现。
3.3 模型参数重构
DiracNet[38]是一种与我们相关的参数重构方法。它通过把一个卷积层的卷积核编码为:
\]
其中\(\hat{W}\) 是卷积的最终权重,是一个四阶的张量矩阵;\(W_{norm}\) 是标准化的kernel,\(\vec{a}\)、\(\vec{b}\) 是需要学习的向量。与残差神经网络相比,在性能方面,DiracNet在CIFAR-100数据集上要低 \(2.29\%\) ,ImageNet数据集上要低\(0.62\%\)。
DiracNet模型与RepVGG的差异为:
- 我们的结构参数重构是通过一个具体结构的实际数据流来实现的,这个具体结构以后可以转换成另一个结构,而DiracNet仅仅使用另一个转换核的数学表达式,以便于优化。也就是说,一个结构参数重构的平面模型是一个实时训练的多分支模型,而DiracNet不是。
- DiracNet的性能高于通常参数化的普通模型,但低于可比较的ResNet,而RepVGG模型的性能远远优于ResNet。
Asym Conv Block(ACB)[9]采用非对称Conv来加强规则Conv的“骨架”,这可以看作是结构参数重构的另一种形式,因为它将训练的块转换为Conv。与我们的方法相比,不同之处在于,ACB是为组件级改进而设计的,并在任何体系结构中用作conv层的替换,而我们的结构重新参数化对于训练普通convnet非常关键,如第4.2节所示。
3.4 Winograd(威诺格拉德)卷积
RepVGG只使用3×3 conv,因为它在GPU和CPU上都被一些现代计算库(如NVIDIA cuDNN[1]和Intel MKL[16])高度优化。下表显示了在1080TI GPU上用cudnn7.5.0测试的理论FLOPS、实际运行时间和计算密度(以每秒Tera(兆兆)浮点运算(TFLOPS)为单位)。结果表明,3×3conv的理论计算密度约为4倍,表明理论总的FLOPs数不能代表不同体系结构的实际速度。

加速3×3 conv的一个经典算法是Winograd算法[18](仅当步长为1时),它得到了cuDNN和MKL等库的良好支持(默认情况下启用)。例如,使用标准\(F(2 \times 2, 3 \times 3)\)的Winograd,3×3 conv的乘法量(mul)减少到原来的\(\frac{4}{9}\)。由于乘法要比加法耗时得多,所以我们计算Muls来度量Winograd支持下的计算开销(后面会提到)。请注意,特定的计算库和硬件决定是否对每个操作符使用Winograd,因为小规模的卷积可能不会由于内存开销而加速。
4、由结构参数重构技术构建RepVGG
4.1 简单即快速、内存使用经济、灵活
使用简单convnet至少有三个原因:它们速度快、内存经济且灵活。
Fast 许多最近的多分支架构的理论 FLOPs比VGG低,但可能运行得不快。 VGG-16的 FLOPs是EffificientNet-B3的8.4倍,但是运行速度却是其1.8倍,这意味着前者的计算密度为后者的15倍。除了Winograd conv带来的加速外,FLOPs和速度之间的差异可归因于两个重要因素,它们对速度有相当大的影响,但FLOPs没有考虑到这两个因素:内存访问成本(MAC)和并行度[23]。如:虽然所需的分支加法或级联计算可以忽略不计,但MAC是重要的。此外,MAC在分组卷积中占很大一部分时间。另一方面,在相同的FLOPs条件下,一个高并行度的模型比另一个低并行度的模型要快得多。由于多分支拓扑结构被广泛应用于初始和自动生成的体系结构中,因此使用多个小的操作符来代替几个大的操作符。先前的一项工作[23]报告说,NASNET-A[42]中的分段运算符(即单个conv或池操作在一个构建块中的数目)为13,这对GPU等具有强大并行计算能力的设备不友好,并引入额外的开销,如内核启动和同步。相反,在resnet中,这个数字是2或3,我们将它设为1:单个conv。
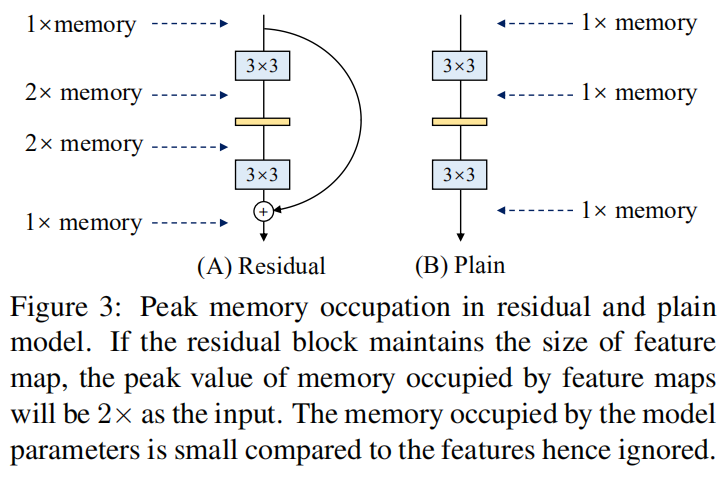
Memory-economical 多分支拓扑的内存效率很低,因为每个分支的结果都需要保留到加法或级联之后,这大大提高了内存占用的峰值。剩余块的输入需要保持,直到添加为止。假设块保持特征图大小,则内存占用峰值为输入的两倍。相反,普通拓扑允许在操作完成时立即释放特定层的输入占用的内存。在设计专用硬件时,一个普通的ConvNet允许深度内存优化并降低内存单元的成本,这样我们就可以将更多的计算单元集成到芯片上。
Flexible 多分支拓扑对体系结构规范施加了约束。ResNet要求conv层被组织为残差块,这限制了灵活性,因为每个残差块的最后一个conv层必须产生相同形状的张量,否则快捷加法就没有意义。更糟的是,多分支拓扑限制了channel修剪[20,12]的应用,这是一种去除一些不重要通道的实用技术,一些方法可以通过自动发现每层的适当宽度来优化模型结构[7]。然而,多分支模型使得剪枝变得棘手,并导致性能显著下降或加速比低[6,20,8]。相反,简单的体系结构允许我们根据需求自由配置每个conv层,并进行删减以获得更好的性能效率权衡。
4.2 训练时的多分支结构
普通网络有很多优点,但有一个致命的缺点:性能差。例如,有了像BN[17]这样的现代组件,VGG-16可以在ImageNet上达到72%以上的top-1精度,这似乎已经过时了。我们的结构参数重构方法受到ResNet的启发,它显式地构造一个快捷分支,将信息流建模为\(y = x + f(x)\),并使用一个残差块来学习\(f\)。当 \(x\)与\(f(x)\)的维度不一样时,公式变为\(y=g(x)+f(x)\),\(g(x)\)是一个\(1 \times 1\)的卷积。resnet成功的一个解释是,这种多分支架构使模型成为众多较浅模型的隐式集合[35]。特别地,对于n个块,模型可以解释为2n个模型的集合,因为每个块将流分支成两条路径。由于多分支拓扑在推理上有缺陷,但分支似乎有利于训练[35],我们使用多个分支来对众多模型进行训练的集成。
为了使大多数成员更浅或更简单,我们使用ResNet-like恒等式(仅当维度匹配时)和\(1×1\)分支,使得构建块训练时的信息流为
\]
我们简单地堆叠几个这样的区块来建构训练时间模型。(注意,这样信息流中的结构在每层都一样,运算的时候就更快了)
从与[35]相同的角度来看,模型变成了一个由n个block生成的\(3^{n}\)个成员组成的集合。训练后等价地转化为\(y=h(x)\),其中h由一个conv层实现,其参数通过训练后的一系列代数参数导出。
4.3 推理时的模型参数重构
这里我们将介绍把\(y=x+g(x)+f(x)\)结构转换为\(y=h(x)\)结构。需要注意的是每一个分支在合并(相加)之前都使用了BN层。
一般地,我们假设输入channel为\(C_{1}\),输出通道为\(C_{2}\),则\(3 \times 3\)的卷积核的权值矩阵为:
\]
对于\(1 \times 1\)的分支, \(1 \times 1\)的卷积核的权值矩阵为:
\]
我们使用\(\boldsymbol{\mu}^{(3)}, \boldsymbol{\sigma}^{(3)},\boldsymbol{\gamma}^{(3)}, \boldsymbol{\beta}^{(3)}\)分别表示\(3 \times 3\)之后BN层的累计均值、标准差、缩放因子、偏置;
我们使用\(\boldsymbol{\mu}^{(1)}, \boldsymbol{\sigma}^{(1)},\boldsymbol{\gamma}^{(1)}, \boldsymbol{\beta}^{(1)}\)分别表示\(1 \times 1\)之后BN层的累计均值、标准差、缩放因子、偏置;
我们使用\(\boldsymbol{\mu}^{(0)}, \boldsymbol{\sigma}^{(0)},\boldsymbol{\gamma}^{(0)}, \boldsymbol{\beta}^{(0)}\)分别表示identity分支的累计均值、标准差、缩放因子、偏置;
令\(M^{(1)} \in \mathbb{R}^{N\times C_{1}\times H_{1}\times W_{1}}\)表示输入,\(M^{(2)} \in \mathbb{R}^{N\times C_{2}\times H_{2}\times W_{2}}\)表示输出。\(*\)表示卷积操作。
如果\(C_{1}=C_{2}, H_{1}=H_{2}, W_{1}=W_{2}\),则有:
\begin{aligned}
M^{(2)} = BN(M^{(1)} * W^{(3)}, \boldsymbol{\mu}^{(3)}, \boldsymbol{\sigma}^{(3)},\boldsymbol{\gamma}^{(3)}, \boldsymbol{\beta}^{(3)})
+ BN(M^{(1)} * W^{(1)}, \boldsymbol{\mu}^{(1)}, \boldsymbol{\sigma}^{(1)},\boldsymbol{\gamma}^{(1)}, \boldsymbol{\beta}^{(1)})
+ BN(M^{(1)}, \boldsymbol{\mu}^{(0)}, \boldsymbol{\sigma}^{(0)},\boldsymbol{\gamma}^{(0)}, \boldsymbol{\beta}^{(0)})
\end{aligned}
\end{equation}
\]
否则,我们简单地不使用恒等映射分支,因此上面的方程只有前两项。对\(\forall 1\leq i\leq C_{2}\):
\]
我们首先将每一个BN及其前一个conv层转换为带有偏置向量的conv。令\(\left \{{W}',{\boldsymbol{b}}' \right \}\)表示从\(\left \{W,\boldsymbol{\mu}, \boldsymbol{\sigma}, \boldsymbol{\gamma}, \boldsymbol{\beta} \right \}\)转换的kernel和bias,则有:
\]
因此,容易验证对\(\forall 1\leq i\leq C_{2}\):
(M*{W}')_{:,i,:,:} + {\boldsymbol{b}}'_{i}
\]
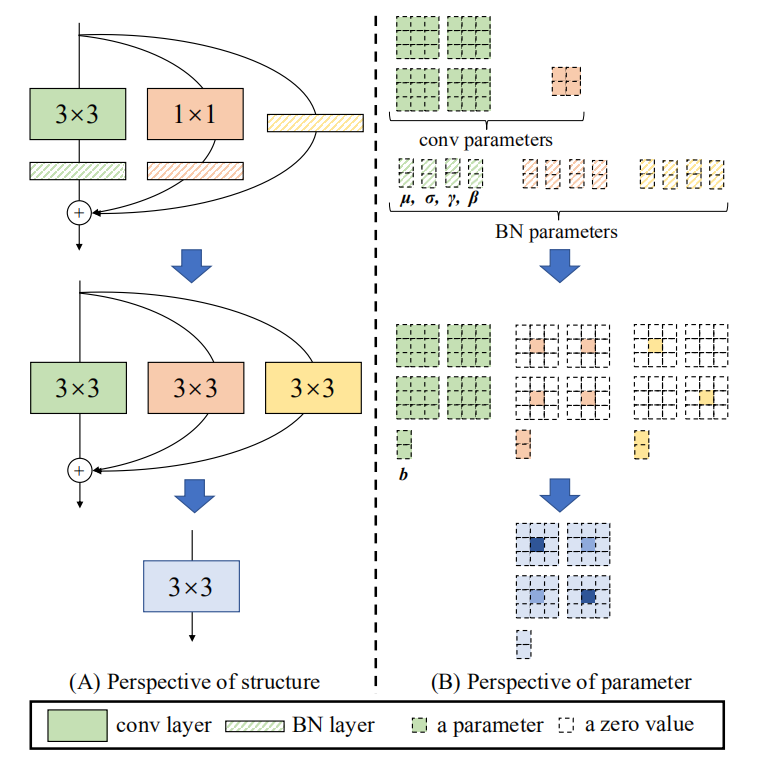
上述变换也适用于identity分支,因为identity 特征图可以看作是以单位矩阵为核的1×1变换。在这样的变换之后,我们将有一个3×3核、两个1×1核和三个偏置向量。然后我们将三个偏差向量相加得到最终偏差,将1×1的核加到3×3核的中心点得到最终的3×3核,这很容易实现,首先将两个1×1核置零到3×3,然后将三个核相加,如下图所示。注意,这种变换的等价性要求3×3和1×1层具有相同的步幅,并且后者的填充配置应比前者少一个像素。例如,对于将输入填充一个像素的3×3层(这是最常见的情况),1×1层的填充应为0。
4.4 结构规格
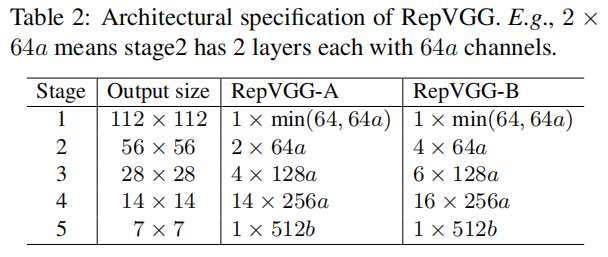
下表展示了RepVGG的规格,包括深度和宽度。RepVGG是VGG风格的平面网络,且大量使用\(3 \times 3\)的卷积,但是没有像VGG网络那样使用最大池化,因为设计这种网络只使用一种操作,可以加快运行速度。所有的stage都使用Repblock替换了\(3 \times 3\)的卷积,每层的第一个卷积操作,进行下采样。对于图像分类,使用全局平均池化接全连接层,作为head。对于其他任务,任务特定的头可以用所有层生成的特征。
关于每个stage的layer数量,主要由如下的三个原则确定:
- 第一级的分辨率很高,非常耗时,因此我们只使用一层来降低延迟。
- 最后一级应该有更多的通道,所以我们只使用一层来保存参数。
- 我们将大多数层放在倒数第二个stage(在ImageNet上具有\(14 \times 14\)的输出分辨率),跟随ResNet及其最新变体。(如,ResNet-101使用了69个layer在\(14 \times 14\)的阶段)
最后,我们对5个stage的层数分配是:[1, 2, 4, 14, 1],并命名为RepVGG-A。我们也构建了一个更深的RepVGG-B,在stage2、stage3、stage4都增加了2层。
RepVGG-A用于和其他轻量级的模型进行比较;RepVGG-B用于和ResNet-18/34/50这种中等体量的模型进行比较 。当然RepVGG-B取得了更好的性能表现。
我们通过均匀缩放经典宽度设置[64、128、256、512]来确定层宽度。我们使用乘数a来缩放前四个阶段,b来缩放最后一个阶段,并且通常设置b>a,因为我们希望最后一层对于分类或其他下游任务具有更丰富的特征。由于RepVGG在最后一个阶段只有一个层,因此较大的b不会显著增加延迟或参数量。具体地 stage2、3、4、5的宽度分别为[64a、128a、256a、512b]。
为了避免大特征图上的大卷积,如果\(a < 1\),我们缩小stage1,但不放大它,因此stage1的宽度是\(min\left ( 64, 64a \right )\)。
为了进一步减少参数和计算量,我们可以选择将分组的3×3 conv层与密集的conv层交错,以精度换取效率。具体来说,我们为RepVGG-A的第3、5、7、…、21层以及RepVGG-B的附加第23、25和27层设置groups数目为\(g\)。为了简单起见,我们将\(g\)全局设置为1、2或4,没有按层调整。我们不使用相邻的groupwise conv层,因为这将禁用通道间的信息交换并带来副作用:某个通道的输出只能从输入通道的一小部分中导出。注意,1×1分支应具有与3×3 conv相同的groups数目为\(g\)。
完
RepVGG的更多相关文章
- ACNet:用于图像超分的非对称卷积网络
编辑:Happy 首发:AIWalker Paper:https://arxiv.org/abs/2103.13634 Code:https://github.com/hellloxiaotian/A ...
- RepLKNet:不是大卷积不好,而是卷积不够大,31x31卷积了解一下 | CVPR 2022
论文提出引入少数超大卷积核层来有效地扩大有效感受域,拉近了CNN网络与ViT网络之间的差距,特别是下游任务中的性能.整篇论文阐述十分详细,而且也优化了实际运行的表现,值得读一读.试一试 来源:晓飞 ...
随机推荐
- Shell 编程快速上手
Shell 编程快速上手 test.sh #!/bin/sh cd ~ mkdir shell_tut cd shell_tut for ((i=0; i<10; i++)); do touch ...
- How to Use RSS on Your Website
RSS feed 1 <!DOCTYPE html> <html lang="en"> <head> <meta charset=&quo ...
- Top 10 JavaScript errors
Top 10 JavaScript errors javascript errors https://rollbar.com/blog/tags/top-errors https://rollbar. ...
- html fragment & html template & virtual DOM & web components
html fragment & html template & virtual DOM https://developer.mozilla.org/en-US/docs/Web/API ...
- 稳定币USDN的算法调控
在NGK公链的稳定币系统中,USDN的价格有时会出现一定幅度的波动.正如我们会看到USDT有时会是0.99美元,有时是1.01美元一样.那么,要保障USDN在二级市场的价格基本稳定,要如何调节供需呢? ...
- NGK数字钱包的特点是什么?NGK钱包的优点和缺点是什么?
说起区块链数字资产,那就离不开谈到数字钱包.数字钱包不仅有资产管理的功能,还可以进行资产理财.资产交易,甚至能为公链DAPP导流. 对于NGK公链而言,其数字钱包已然成为了解NGK公链的基础条件.NG ...
- 【python接口自动化】- 对接各大数据库
相信很多小伙伴在使用python进行自动化测试的时候,都会涉及到数据库数据校验的问题,在前面的随笔中就已经有讲过连接mysql的使用,今天给大家汇总一下python对接几大常用的数据库操作的方法!众所 ...
- django学习-11.开发一个简单的醉得意菜单和人均支付金额查询页面
1.前言 刚好最近跟技术部门的[产品人员+UI人员+测试人员],组成了一桌可以去公司楼下醉得意餐厅吃饭的小team. 所以为了实现这些主要点餐功能: 提高每天中午点餐效率,把点餐时间由20分钟优化为1 ...
- GridSearchCV网格搜索得到最佳超参数, 在K近邻算法中的应用
最近在学习机器学习中的K近邻算法, KNeighborsClassifier 看似简单实则里面有很多的参数配置, 这些参数直接影响到预测的准确率. 很自然的问题就是如何找到最优参数配置? 这就需要用到 ...
- Redis常用数据类型及其存储结构(源码篇)
一.SDS 1,SDS源码解读 sds (Simple Dynamic String),Simple的意思是简单,Dynamic即动态,意味着其具有动态增加空间的能力,扩容不需要使用者关心.Strin ...