《DSP using MATLAB》Problem 8.30
10月1日,新中国70周岁生日,上午观看了盛大的庆祝仪式,整齐的方阵,先进的武器,尊敬的先辈英雄,欢乐的人们,愿我们的
国家越来越好,人民生活越来越好。
接着做题。

代码:
%% ------------------------------------------------------------------------
%% Output Info about this m-file
fprintf('\n***********************************************************\n');
fprintf(' <DSP using MATLAB> Problem 8.30 \n\n'); banner();
%% ------------------------------------------------------------------------ % -----------------------------------
% Ω=(2/T)tan(ω/2)
% ω=2*[atan(ΩT/2)]
% Digital Filter Specifications:
% -----------------------------------
wp = 0.4*pi; % digital passband freq in rad
ws = 0.6*pi; % digital stopband freq in rad
Rp = 0.5; % passband ripple in dB
As = 50; % stopband attenuation in dB Ripple = 10 ^ (-Rp/20) % passband ripple in absolute
Attn = 10 ^ (-As/20) % stopband attenuation in absolute % Analog prototype specifications: Inverse Mapping for frequencies
T = 2; % set T = 1
Fs = 1/T;
OmegaP = (2/T)*tan(wp/2); % prototype passband freq
OmegaS = (2/T)*tan(ws/2); % prototype stopband freq % Analog Butterworth Prototype Filter Calculation:
[cs, ds] = afd_butt(OmegaP, OmegaS, Rp, As); % Calculation of second-order sections:
fprintf('\n***** Cascade-form in s-plane: START *****\n');
[CS, BS, AS] = sdir2cas(cs, ds);
fprintf('\n***** Cascade-form in s-plane: END *****\n'); % Calculation of Frequency Response:
[db_s, mag_s, pha_s, ww_s] = freqs_m(cs, ds, 2*pi/T); % --------------------------------------------------------------------
% find exact band-edge frequencies for the given dB specifications
% --------------------------------------------------------------------
%ind = find( abs(ceil(db_s))-50 == 0 )
[diff_to_50dB, ind] = min(abs(db_s+50))
db_s(ind-3 : ind+3) % magnitude response, dB ww_s(ind)/(pi) % analog frequency in kpi units
%ww_s(ind)/(2*pi) % analog frequency in Hz units [sA,index] = sort(abs(db_s+50));
AA_dB = db_s(index(1:8))
AB_rad = ww_s(index(1:8))/(pi)
AC_Hz = ww_s(index(1:8))/(2*pi)
% ------------------------------------------------------------------- % Calculation of Impulse Response:
[ha, x, t] = impulse(cs, ds); % Impulse Invariance Transformation:
%[b, a] = imp_invr(cs, ds, T); % Bilinear Transformation
[b, a] = bilinear(cs, ds, Fs);
[C, B, A] = dir2cas(b, a); % Calculation of Frequency Response:
[db, mag, pha, grd, ww] = freqz_m(b, a); % --------------------------------------------------------------------
% find exact band-edge frequencies for the given dB specifications
% --------------------------------------------------------------------
%ind = find( abs(ceil(db))-50 == 0 )
[diff_to_80dB, ind] = min(abs(db+50))
db(ind-3 : ind+3) % magnitude response, dB ww(ind)/(pi)
%ww(ind)*Fs/(2*pi) (2/T)*tan(ww(ind)/2)/pi [sA,index] = sort(abs(db+50));
AA_dB = db(index(1:8))'
AB_rad = ww(index(1:8))'/pi
AC_Hz = (2/T)*tan(ww(index(1:8))'/2)/pi
% ------------------------------------------------------------------- %% -----------------------------------------------------------------
%% Plot
%% -----------------------------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Analog Butterworth lowpass')
set(gcf,'Color','white');
M = 1; % Omega max subplot(2,2,1); plot(ww_s/pi, mag_s); grid on; axis([-M, M, 0, 1.2]);
xlabel(' Analog frequency in \pi units'); ylabel('|H|'); title('Magnitude in Absolute');
%set(gca, 'XTickMode', 'manual', 'XTick', [-0.876, -0.463, 0, 0.463, 0.876]); % T=1
set(gca, 'XTickMode', 'manual', 'XTick', [-0.44, -0.23, 0, 0.23, 0.44]); % T=2
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww_s/pi, db_s); grid on; axis([-M, M, -100, 10]);
xlabel('Analog frequency in \pi units'); ylabel('Decibels'); title('Magnitude in dB ');
%set(gca, 'XTickMode', 'manual', 'XTick', [-0.876, -0.463, 0, 0.463, 0.8591, 0.876]); % T=1
set(gca, 'XTickMode', 'manual', 'XTick', [-0.44, -0.23, 0, 0.23, 0.4295, 0.44]); % T=2
set(gca, 'YTickMode', 'manual', 'YTick', [-90, -50, -1, 0]);
set(gca,'YTickLabelMode','manual','YTickLabel',['90';'50';' 1';' 0']); subplot(2,2,3); plot(ww_s/pi, pha_s/pi); grid on; axis([-M, M, -1.2, 1.2]);
xlabel('Analog frequency in \pi nuits'); ylabel('radians'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [-OmegaS, -OmegaP, 0, OmegaP, OmegaS]/pi);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:0.5:1]); subplot(2,2,4); plot(t, ha); grid on; %axis([0, 30, -0.05, 0.25]);
xlabel('time in seconds'); ylabel('ha(t)'); title('Impulse Response'); figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Digital Butterworth lowpass by afd_butt function')
set(gcf,'Color','white');
M = 2; % Omega max subplot(2,2,1); plot(ww/(pi), mag); axis([0, M, 0, 1.2]); grid on;
xlabel('Digital frequency in \pi units'); ylabel('|H|'); title('Magnitude Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww/(pi), pha/pi); axis([0, M, -1.1, 1.1]); grid on;
xlabel('Digital frequency in \pi nuits'); ylabel('radians in \pi units'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:1:1]); subplot(2,2,3); plot(ww/pi, db); axis([0, M, -100, 10]); grid on;
xlabel('Digital frequency in \pi units'); ylabel('Decibels'); title('Magnitude in dB ');
%set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.594, 0.6, 1.0, M]); % T=1
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.594, 0.6, 1.0, M]); % T=2
set(gca, 'YTickMode', 'manual', 'YTick', [-70, -50, -1, 0]);
set(gca,'YTickLabelMode','manual','YTickLabel',['70';'50';' 1';' 0']); subplot(2,2,4); plot(ww/pi, grd); grid on; %axis([0, M, 0, 35]);
xlabel('Digital frequency in \pi units'); ylabel('Samples'); title('Group Delay');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
%set(gca, 'YTickMode', 'manual', 'YTick', [0:5:35]); figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot'));
%pzplotz(b,a); % ----------------------------------------------
% Calculation of Impulse Response
% ----------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Imp & Freq Response')
set(gcf,'Color','white');
t = [0:0.5:60]; subplot(2,1,1); impulse(cs,ds,t); grid on; % Impulse response of the analog filter
axis([0,60,-0.3,0.5]);hold on n = [0:1:60/T]; hn = filter(b,a,impseq(0,0,60/T)); % Impulse response of the digital filter
stem(n*T,hn); xlabel('time in sec'); title (sprintf('Impulse Responses, T=%f',T));
hold off % Calculation of Frequency Response:
[dbs, mags, phas, wws] = freqs_m(cs, ds, 2*pi/T); % Analog frequency s-domain [dbz, magz, phaz, grdz, wwz] = freqz_m(b, a); % Digital z-domain %% -----------------------------------------------------------------
%% Plot
%% ----------------------------------------------------------------- subplot(2,1,2); plot(wws/(2*pi), mags*Fs,'b+', wwz/(2*pi)*Fs, magz,'r'); grid on; xlabel('frequency in Hz'); title('Magnitude Responses'); ylabel('Magnitude'); text(-0.3,0.15,'Analog filter', 'Color', 'b'); text(0.4,0.55,'Digital filter', 'Color', 'r'); %% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
%% MATLAB butter function
%% +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
% Analog Prototype Order Calculations:
N = ceil((log10((10^(Rp/10)-1)/(10^(As/10)-1)))/(2*log10(OmegaP/OmegaS)));
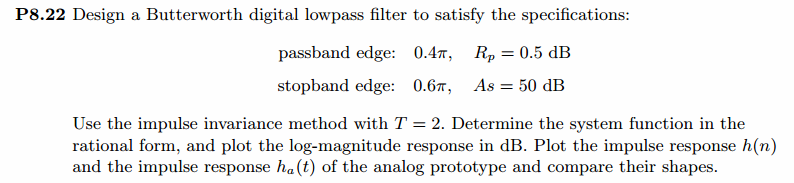
fprintf('\n\n ********** Butterworth Filter Order = %3.0f \n', N) OmegaC = OmegaP/((10^(Rp/10)-1)^(1/(2*N))); % Analog BW prototype cutoff freq
wn = 2*atan((OmegaC*T)/2); % Digital BW cutoff freq % Digital Butterworth Filter Design:
wn = wn/pi; % Digital Butterworth cutoff freq in pi units [b, a] = butter(N, wn); [C, B, A] = dir2cas(b, a) % Calculation of Frequency Response:
[db, mag, pha, grd, ww] = freqz_m(b, a); figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Digital Butterworth lowpass by butter function')
set(gcf,'Color','white');
M = 2; % Omega max subplot(2,2,1); plot(ww/pi, mag); axis([0, M, 0, 1.2]); grid on;
xlabel(' frequency in \pi units'); ylabel('|H|'); title('Magnitude Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [0, 0.0032, 0.5, 0.9441, 1]); subplot(2,2,2); plot(ww/pi, pha/pi); axis([0, M, -1.1, 1.1]); grid on;
xlabel('frequency in \pi nuits'); ylabel('radians in \pi units'); title('Phase Response');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-1:1:1]); subplot(2,2,3); plot(ww/pi, db); axis([0, M, -100, 10]); grid on;
xlabel('frequency in \pi units'); ylabel('Decibels'); title('Magnitude in dB ');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
set(gca, 'YTickMode', 'manual', 'YTick', [-70, -50, -1, 0]);
set(gca,'YTickLabelMode','manual','YTickLabel',['70';'50';' 1';' 0']); subplot(2,2,4); plot(ww/pi, grd); grid on; %axis([0, M, 0, 35]);
xlabel('frequency in \pi units'); ylabel('Samples'); title('Group Delay');
set(gca, 'XTickMode', 'manual', 'XTick', [0, 0.4, 0.6, 1.0, M]);
%set(gca, 'YTickMode', 'manual', 'YTick', [0:5:35]); figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Pole-Zero Plot')
set(gcf,'Color','white');
zplane(b,a);
title(sprintf('Pole-Zero Plot'));
%pzplotz(b,a); % ----------------------------------------------
% Calculation of Impulse Response
% ----------------------------------------------
figure('NumberTitle', 'off', 'Name', 'Problem 8.30 Imp & Freq Response')
set(gcf,'Color','white');
t = [0:0.5:60]; subplot(2,1,1); impulse(cs,ds,t); grid on; % Impulse response of the analog filter
axis([0,60,-0.3,0.5]);hold on n = [0:1:60/T]; hn = filter(b,a,impseq(0,0,60/T)); % Impulse response of the digital filter
stem(n*T,hn); xlabel('time in sec'); title (sprintf('Impulse Responses, T=%f',T));
hold off % Calculation of Frequency Response:
[dbs, mags, phas, wws] = freqs_m(cs, ds, 2*pi/T); % Analog frequency s-domain [dbz, magz, phaz, grdz, wwz] = freqz_m(b, a); % Digital z-domain %% -----------------------------------------------------------------
%% Plot
%% ----------------------------------------------------------------- subplot(2,1,2); plot(wws/(2*pi), mags*Fs,'b+', wwz/(2*pi)*Fs, magz,'r'); grid on; xlabel('frequency in Hz'); title('Magnitude Responses'); ylabel('Magnitude'); text(-0.3,0.15,'Analog filter', 'Color', 'b'); text(0.4,0.55,'Digital filter', 'Color', 'r');
运行结果:
非归一化Butterworth模拟原型低通滤波器,直接形式的系数,
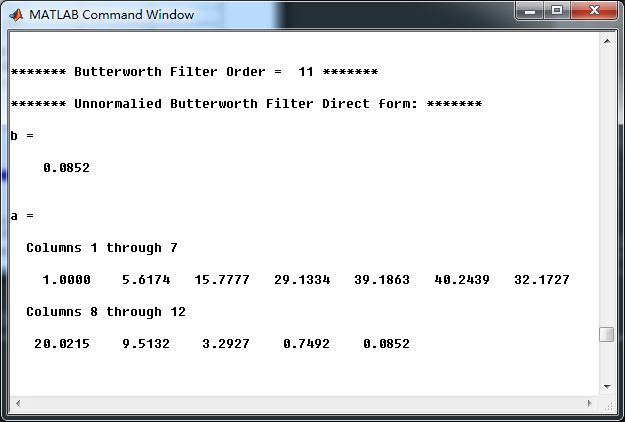
模拟低通串联形式的系数:
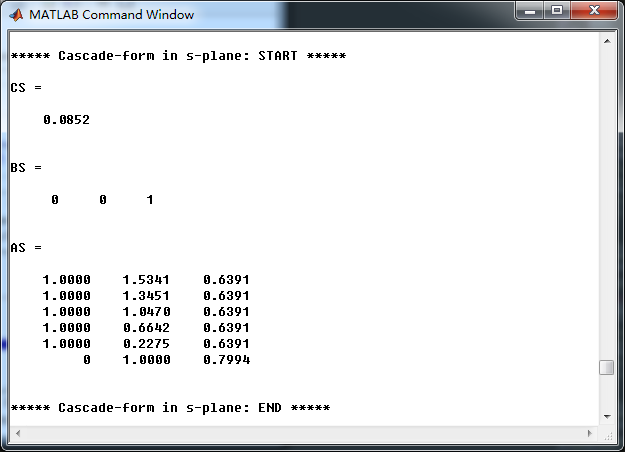
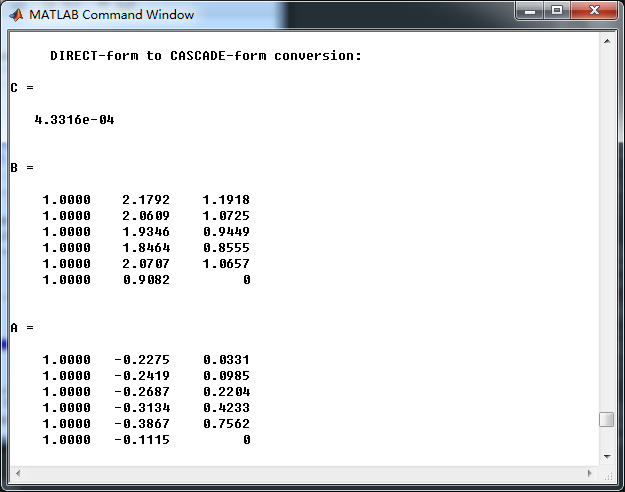
用双线性变换法,转换成数字Butterworth低通,直接形式的系数如下
数字低通串联形式系数
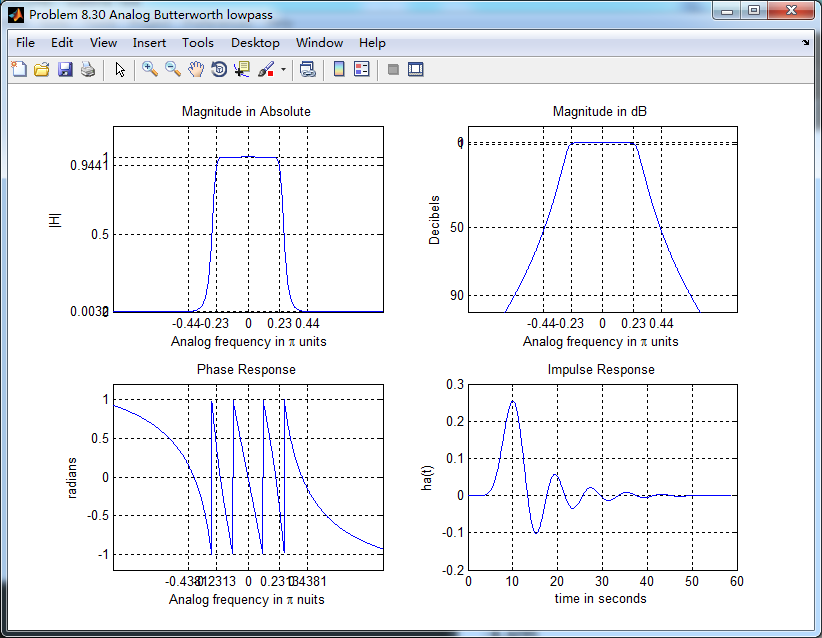
模拟Butterworth低通原型滤波器的幅度谱、相位谱和脉冲响应
双线性变换法,得到的数字Butterworth低通滤波器,起幅度谱、相位谱和群延迟响应

数字低通系统函数的零极点图

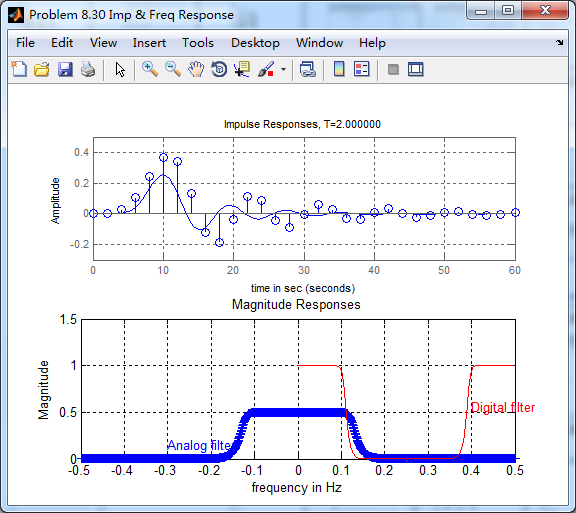
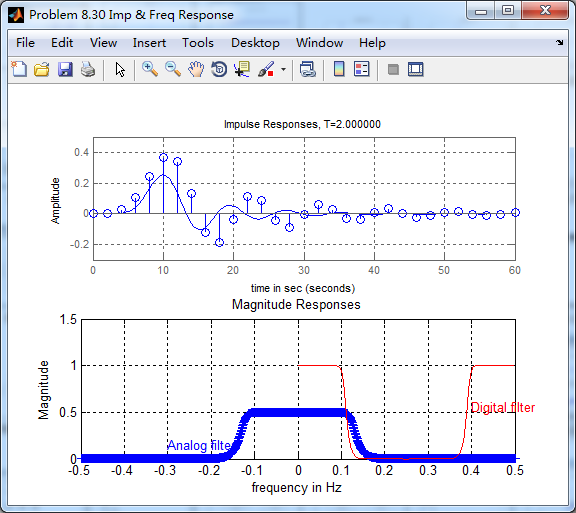
下图的上半部分,模拟低通和数字低通的脉冲响应对比,可以看出形态不一致。
采用MATLAB自带的butter函数求取数字低通,其幅度谱、相位谱和群延迟。
与上面afd_butt函数所得结果相比,相位谱和群延迟稍有不同。

零极点图,也稍有不同,零点部分靠的更紧密。

脉冲响应,与上一种方法对比,结果一样,看不出区别。
《DSP using MATLAB》Problem 8.30的更多相关文章
- 《DSP using MATLAB》Problem 7.30
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 5.30
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output In ...
- 《DSP using MATLAB》Problem 7.23
%% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% Output Info a ...
- 《DSP using MATLAB》Problem 5.22
代码: %% ++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++ %% O ...
- 《DSP using MATLAB》Problem 5.20
窗外的知了叽叽喳喳叫个不停,屋里温度应该有30°,伏天的日子难过啊! 频率域的方法来计算圆周移位 代码: 子函数的 function y = cirshftf(x, m, N) %% -------- ...
- 《DSP using MATLAB》Problem 3.8
2018年元旦,他乡加班中,外面尽是些放炮的,别人的繁华与我无关. 代码: %% ----------------------------------------------------------- ...
- 《DSP using MATLAB》Problem 3.3
按照题目的意思需要利用DTFT的性质,得到序列的DTFT结果(公式表示),本人数学功底太差,就不写了,直接用 书中的方法计算并画图. 代码: %% -------------------------- ...
- 《DSP using MATLAB》Problem 2.20
代码: %% ------------------------------------------------------------------------ %% Output Info about ...
- 《DSP using MATLAB》Problem 2.14
代码: %% ------------------------------------------------------------------------ %% Output Info about ...
随机推荐
- D3.js坐标轴的绘制方法、添加坐标轴的刻度和各比例尺的坐标轴(V3版本)
坐标轴(Axis) 坐标轴(Axis)在很多图表中都可见到,例如柱形图.折线图.散点图等.坐标轴由一组线段和文字组成,坐标轴上的点由一个坐标值确定.但是,如果使用SVG的直线和文字一笔一画的绘制坐 ...
- python 通过zabbix api获得所有主机的ip
#!/usr/bin/env python3 #coding=utf-8 import jsonimport requests#from urllib import requests, parse,e ...
- 利用DNSQuery 进行DNS查询
#include <WinSock2.h> #include <WinDNS.h> #pragma comment (lib, "Dnsapi.lib") ...
- CSIC_716_20191101【编程语言、变量、垃圾回收机制】
编程语言分类:机器语言.汇编语言.高级语言. 机器语言:机器能直接识别的程序语言或指令代码(二进制指令),勿需经过翻译,每一操作码在计算机内部都有相应的电路来完成它 汇编语言:比机器语言略高级,用英文 ...
- oxyplot 禁止拖动,缩放
<oxy:Plot> IsZoomEnabled= IsPanEnabled=/> IsZoomEnabled= IsPanEnabled=/> 关键代码: IsZoomE ...
- 阿里P8架构师谈:数据库分库分表、读写分离的原理实现,使用场景
本文转载自:阿里P8架构师谈:数据库分库分表.读写分离的原理实现,使用场景 为什么要分库分表和读写分离? 类似淘宝网这样的网站,海量数据的存储和访问成为了系统设计的瓶颈问题,日益增长的业务数据,无疑对 ...
- 在ubuntu下编写python
一般情况下,ubuntu已经安装了python,打开终端,直接输入python,即可进行python编写. 默认为python2 如果想写python3,在终端输入python3即可. 如果需要执行大 ...
- 使用串口绘制实时曲线 —— SerialChart
SerialChart:下载 1. 实验效果 2. 串口程序 ){ ){ y = ; x = ; } ) y++; else y--; z = sin(x*Pi/); p = cos(x*Pi/); ...
- 如何在 JavaScript 中使用 C 程序
JavaScript 是个灵活的脚本语言,能方便的处理业务逻辑.当需要传输通信时,我们大多选择 JSON 或 XML 格式. 但在数据长度非常苛刻的情况下,文本协议的效率就非常低了,这时不得不使用二进 ...
- PAT甲级——A1117 Eddington Number【25】
British astronomer Eddington liked to ride a bike. It is said that in order to show off his skill, h ...