NAND FLASH驱动框架以及程序实现
1、NAND FLASH的硬件连接:
实验用的NAND FLASH芯片为K9F2G08U0C,它是三星公司的存储芯片,它的大小为256M。它的接线图如下所示:
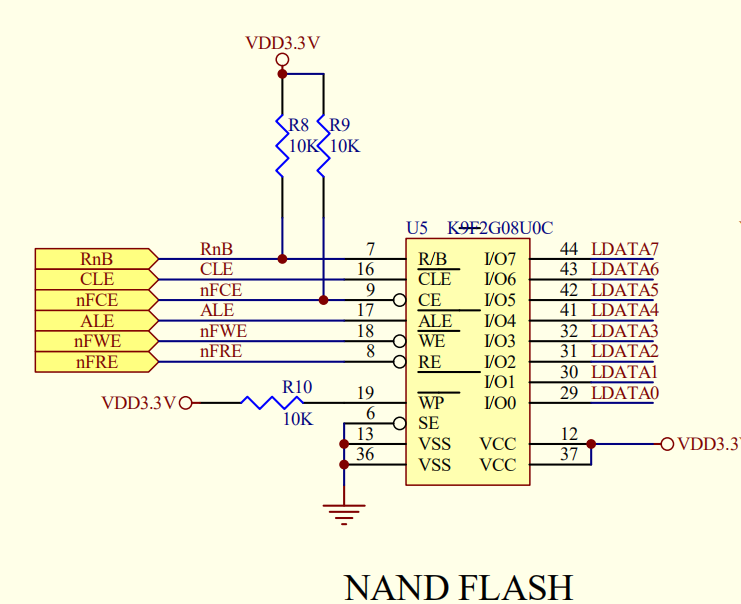
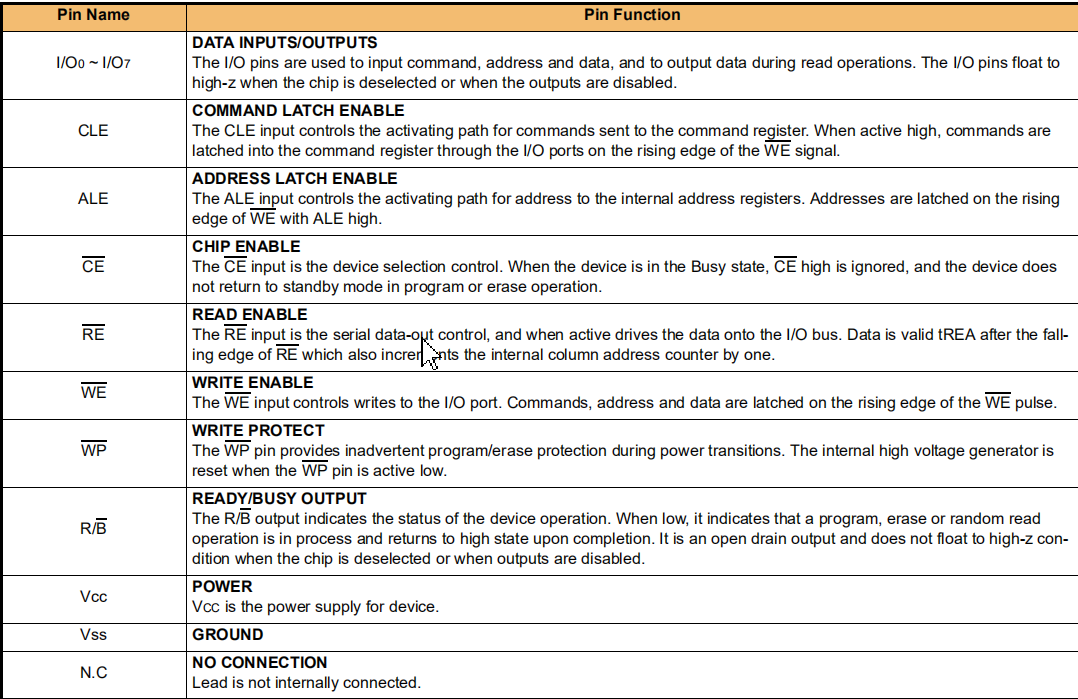
它的每个引脚的分别为LDATA0-LDATA7为数据引脚、CLE为发送命令使能引脚、ALE为发送地址使能引脚、CE为芯片使能引脚、WE为写使能引脚、WP为写保护引脚、R/B为芯片是否繁忙的状态指示引脚,如下图所示:
2、NAND FLASH的操作:
根据NAND FLASH的芯片手册可以知道需要操作NAND FLASH一般的流程是发出命令、发出地址、发出数据/读数据,下面依次分析。
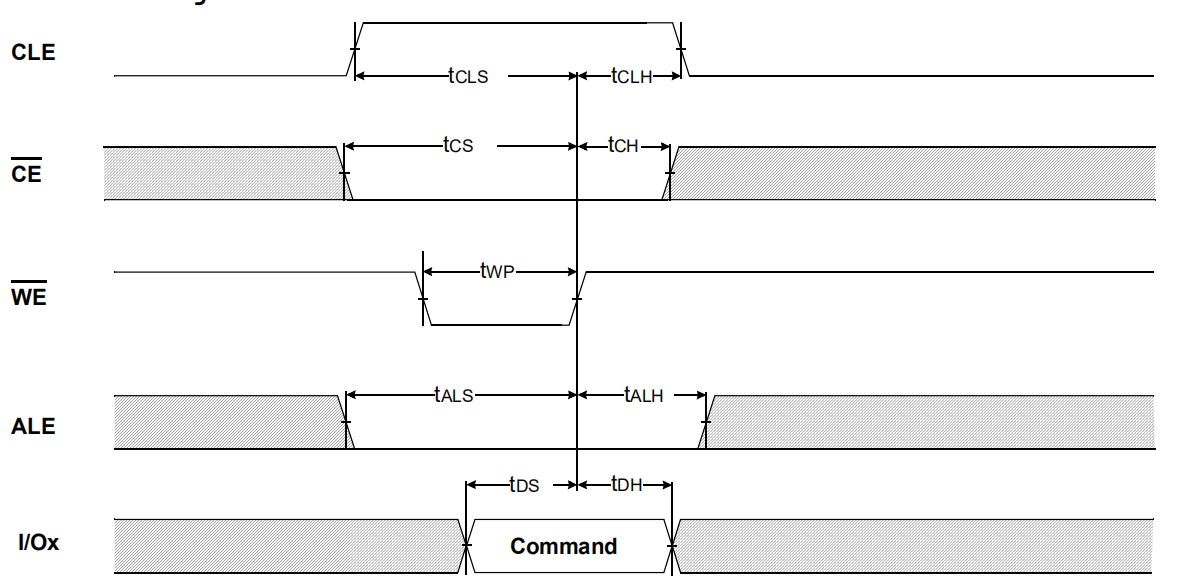
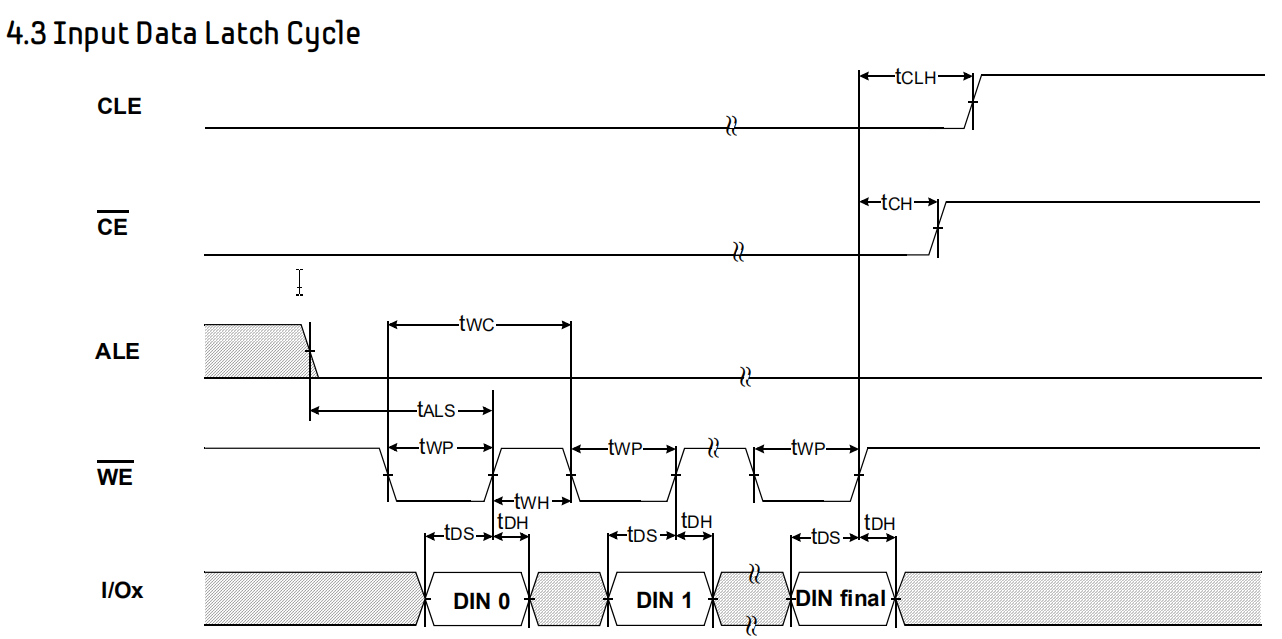
a、发命令,对于NAND FLASH芯片来说需要1、选中芯片(CE为低电平);2、CLE设为高电平、ALE设为低电平;3、在DATA0-DATA7上输出命令数据;4、在WE上发出一个上升沿的信号。这样命令数据就会被写入命令的命令寄存器。而对于S3C2440来说,只要简单的令NFCMD寄存器为命令值S3C2440的NAND控制器就可以完成1-4的操作。
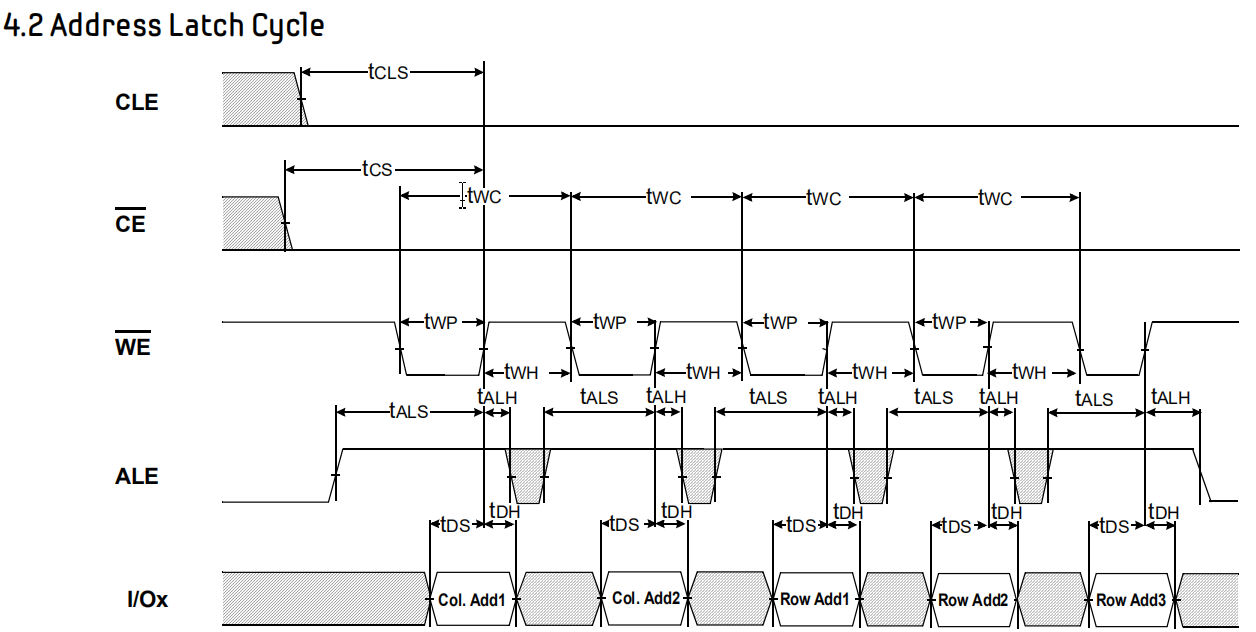
b、发地址,对于NAND FLASH芯片来说需要1、选中芯片(CE为低电平);2、ALE设为高电平、CLE设为低电平;3、在DATA0-DATA7上输出地址数据;4、在WE上发出一个上升沿的信号。这样地址数据就会被写入地址寄存器。分析图中可知需要5个字节的地址。而对于S3C2440来说,只要简单的令NFADDR寄存器为地址值S3C2440的NAND控制器就可以完成1-4的操作。
c、发数据/读数据,对于NAND FLASH芯片来说需要1、选中芯片(CE为低电平);2、ALE设为低电平、CLE设为低电平;3、在DATA0-DATA7上输出数据或读入数据;4、在WE上发出一个上升沿的信号,这样数据就会被写入、在RE上发出一个上升沿信号,这样数据就会被读出。而对于S3C2440来说,只要简单的令NFDATA寄存器为数据值或读NFDATA寄存器,S3C2440的NAND控制器就可以完成1-4的操作。
3、读NAND FLASH数据:
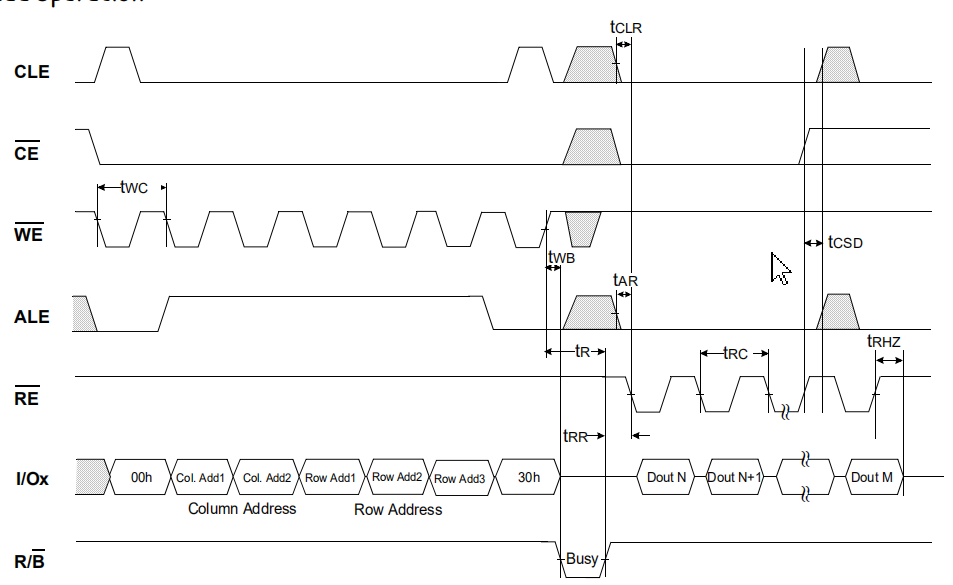
从图中可以看出要读FLASH某个地址的数据需要先发出0x00命令、在发出5字节地址、接着发出0x30命令,过一会等R/B信号不忙之后就可以连续的在RE信号的上升沿时读出数据了。
4、读芯片的ID
读芯片的ID很简单,只要先写入0x90命令,再接着写入0x00地址。接着就可以读出连续的5个字节的芯片ID了,对于K9F2G08U0C,它的芯片ID是EC DA 10 15 44,如下图:

5、NAND FLASH的驱动框架,对与NAND FLASH这个设备,LINUX已经给我们分好了框架,它将稳定的协议层等都做在一个层里面,而将与硬件相关的做在另外一个层里面,而我们写驱动只要更改与硬件相关的方面就可以了。框架如下:
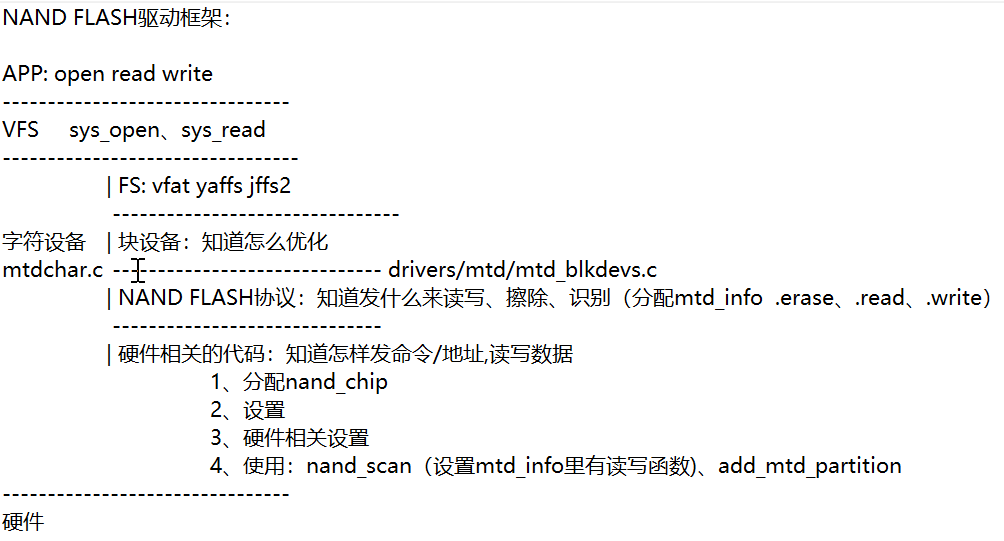
下面从LINUX的启动信息可以得到“S3C24XX NAND Driver”字样,在内核源码中搜索它,可以在drivers\mtd\nand\s3c2410.c文件中得到以下的一些调用层次关系:
s3c2410_nand_init
s3c2440_nand_probe
s3c2410_nand_inithw
s3c2410_nand_init_chip
nand_scan // drivers\mtd\nand\nand_base.c 根据nand_chip的底层操作函数构造mtd_info
nand_scan_ident
nand_set_defaults
if (!chip->select_chip)
chip->select_chip = nand_select_chip;/* 默认值不适用 */ if (chip->cmdfunc == NULL)
chip->cmdfunc = nand_command;
if (chip->waitfunc == NULL)
chip->waitfunc = nand_wait;
nand_get_flash_type
chip->select_chip(mtd, );
chip->cmdfunc(mtd, NAND_CMD_READID, 0x00, -);
*maf_id = chip->read_byte(mtd)
dev_id = chip->read_byte(mtd);
nand_scan_tail
mtd->erase = nand_erase
mtd->read = nand_read;
mtd->write = nand_write; s3c2410_nand_add_partition
add_mtd_device
list_for_each(this, &mtd_notifiers) { // 问. mtd_notifiers在哪里设置
// 答. drivers/mtd/mtd_blkdevs.c,mtdchar.c调用register_mtd_user
struct mtd_notifier *not = list_entry(this, struct mtd_notifier, list);
not->add(mtd);
// mtd_notify_add 和 blktrans_notify_add
先看字符设备mtd_notify_add
class_device_create
class_device_create
再看块设备blktrans_notify_add
list_for_each(this, &blktrans_majors) { // 问. blktrans_majors在哪设置
// 答. drivers\mtd\mdblock.c或mdblock_ro.c调用register_mtd_blktrans //注册队列
struct mtd_blktrans_ops *tr = list_entry(this, struct mtd_blktrans_ops, list); tr->add_mtd(tr, mtd);
mtdblock_add_mtd
add_mtd_blktrans_dev
alloc_disk
set_capacity
gd->queue = tr->blkcore_priv->rq;//blk_init_queue(mtd_blktrans_request, &tr->blkcore_priv->queue
add_disk
}
}
接着搜索“end_request”这个块设备驱动程序的通用函数来找到NAND FLASH块设备的请求函数,在drivers\mtd\mtd_blkdevs.c 文件中搜多到了它。通过这个文件可以看到块设备的通用框架的流程:
mtd_blktrans_ops->blkcore_priv-rq
gd->queue = tr->blkcore_priv->rq;
struct mtd_blktrans_ops *tr = new->tr;
int add_mtd_blktrans_dev(struct mtd_blktrans_dev *new)
add_mtd_blktrans_dev(dev);
mtdblock_add_mtd(struct mtd_blktrans_ops *tr, struct mtd_info *mtd)
static void blktrans_notify_add(struct mtd_info *mtd)
static void blktrans_notify_add(struct mtd_info *mtd)
{
struct list_head *this; if (mtd->type == MTD_ABSENT)
return; list_for_each(this, &blktrans_majors) {
struct mtd_blktrans_ops *tr = list_entry(this, struct mtd_blktrans_ops, list); tr->add_mtd(tr, mtd);
}
list_for_each(this, &mtd_notifiers) {//从头到尾访问mtd_notifiers链表
struct mtd_notifier *not = list_entry(this, struct mtd_notifier, list);
not->add(mtd);//调用mtd_notifier结构体的add函数
}
add_mtd_device(struct mtd_info *mtd) add_mtd_partitions(s3c_mtd, s3c_nand_parts, ); 读函数mtd_blktrans_ops->readsect
写函数mtd_blktrans_ops->writesect
首先NAND FLASH驱动框架也是采用驱动分层分离的方法
最终分析下来,NAND FLASH驱动框架涉及到的文件有:drivers\mtd\mtdcore.c 、drivers\mtd\mtd_blkdevs.c、drivers\mtd\mdblock.c、drivers\mtd\nand\nand_base.c、drivers\mtd\nand\s3c2410.c等
最终分析出读函数为mtd_blktrans_ops->readsect;写函数为mtd_blktrans_ops->writesect。最终定位到mtd->read与mtd->write,而这两个函数又可以定位到nand_read、nand_write;接着向下定位可以定位到nand_chip->select_chip、nand_chip->cmd_ctrl、nand_chip->IO_ADDR_R、nand_chip->IO_ADDR_W、nand_chip->dev_ready等等。
6、NAND FLASH的驱动程序的编写、测试
在第5部分最后已经分析到了需要我们提供的几个函数和参数,下面直接贴出代码:
/* 参考
* S3c2410.c (drivers\mtd\nand)
* At91_nand.c (drivers\mtd\nand)
*/ #include <linux/module.h>
#include <linux/types.h>
#include <linux/init.h>
#include <linux/kernel.h>
#include <linux/string.h>
#include <linux/ioport.h>
#include <linux/platform_device.h>
#include <linux/delay.h>
#include <linux/err.h>
#include <linux/slab.h>
#include <linux/clk.h> #include <linux/mtd/mtd.h>
#include <linux/mtd/nand.h>
#include <linux/mtd/nand_ecc.h>
#include <linux/mtd/partitions.h> #include <asm/io.h> #include <asm/arch/regs-nand.h>
#include <asm/arch/nand.h> struct s3c_nand_regs
{
unsigned long nfconf ;
unsigned long nfcont ;
unsigned long nfcmd ;
unsigned long nfaddr ;
unsigned long nfdata ;
unsigned long nfeccd0 ;
unsigned long nfeccd1 ;
unsigned long nfeccd ;
unsigned long nfstat ;
unsigned long nfestat0;
unsigned long nfestat1;
unsigned long nfmecc0 ;
unsigned long nfmecc1 ;
unsigned long nfsecc ;
unsigned long nfsblk ;
unsigned long nfeblk ;
}; static struct nand_chip *s3c_nand;
static struct mtd_info *s3c_mtd;
static struct s3c_nand_regs *s3c_nand_regs; static struct mtd_partition s3c_nand_parts[] = {
[] = {
.name = "bootloader",
.size = 0x00040000,
.offset = ,
},
[] = {
.name = "params",
.offset = MTDPART_OFS_APPEND,
.size = 0x00020000,
},
[] = {
.name = "kernel",
.offset = MTDPART_OFS_APPEND,
.size = 0x00200000,
},
[] = {
.name = "root",
.offset = MTDPART_OFS_APPEND,
.size = MTDPART_SIZ_FULL,
}
}; static void s3c2440_select_chip(struct mtd_info *mtd, int chipnr)
{
if(- == chipnr)
{
/* 取消选中:NFCONT[1]设为1 */
s3c_nand_regs->nfcont |= (<<);
}
else
{
/* 选中:NFCONT[1]设为0 */
s3c_nand_regs->nfcont &= ~(<<);
}
} static void s3c_cmd_ctrl(struct mtd_info *mtd, int dat, unsigned int ctrl)
{
if (ctrl & NAND_CLE)
{
/* 发命令:NFCMD = dat */
s3c_nand_regs->nfcmd = dat;
}
else
{
/* 发地址: NFADDR = dat */
s3c_nand_regs->nfaddr = dat;
}
} static int s3c2440_dev_ready(struct mtd_info *mtd)
{
return (s3c_nand_regs->nfstat & (<<));
} static int s3c_nand_init(void)
{
struct clk *clk;
/* 1.分配一个nand_chip结构体 */
s3c_nand = kzalloc(sizeof(struct nand_chip), GFP_KERNEL); s3c_nand_regs = ioremap(0x4e000000,sizeof(struct s3c_nand_regs)); /* 2.设置 */
/* 设置nand_chip是给nand_scan函数使用的,如果不知道怎么设置,先看nand_scan怎么使用
* 它应该提供:选中、发命令、发地址、发数据、判断状态的功能
*/
s3c_nand->select_chip = s3c2440_select_chip;
s3c_nand->cmd_ctrl = s3c_cmd_ctrl;
s3c_nand->IO_ADDR_R = &s3c_nand_regs->nfdata;
s3c_nand->IO_ADDR_W = &s3c_nand_regs->nfdata;
s3c_nand->dev_ready = s3c2440_dev_ready;
s3c_nand->ecc.mode = NAND_ECC_SOFT; /* enable ECC */ /* 3.硬件相关的设置: 根据NAND FLash的手册设置时间参数*/
/* 使能NAND FLASH控制器的时钟 */
clk = clk_get(NULL, "nand");
clk_enable(clk); /* CLKCON bit[4] */ /* HCLK=100MHZ
* TACLS:发出CLE/ALE之后多长时间才发出nWE信号,从NAND手册可知可以同时发出,所以TACLS=0
* TWPRH0:nWE的脉冲宽度,HCLK*(TWPRHO+1),从NAND手册可知,需要>=12ns,所以TWPRHO>=1
* TWRPH1:nWE为高电平之后多长时间CLE/ALE才能变为低电平,从NAND手册可知它要>=5ns,所以TWRPH1>=0
*/
#define TACLS 0
#define TWPRH0 1
#define TWRPH1 0
s3c_nand_regs->nfconf = (TACLS << ) | (TWPRH0 << ) | (TWRPH1<<); /* NFCONT:
* BIT1设为1,取消片选
* BIT0设为1,使能NAND FLASH控制器
*/
s3c_nand_regs->nfcont = (<<) | (<<); /* 4.使用:nand_scan */
s3c_mtd = kzalloc(sizeof(struct mtd_info), GFP_KERNEL);
s3c_mtd->priv = s3c_nand;
s3c_mtd->owner = THIS_MODULE; nand_scan(s3c_mtd,);/* 识别NAND FLASH,构造mtd_info */ /* 5.add_mtd_partitions */
add_mtd_partitions(s3c_mtd, s3c_nand_parts, ); return ;
} static void s3c_nand_exit(void)
{
del_mtd_partitions(s3c_mtd);
kfree(s3c_mtd);
iounmap(s3c_nand_regs);
kfree(s3c_nand);
} module_init(s3c_nand_init);
module_exit(s3c_nand_exit); MODULE_LICENSE("GPL");
另外介绍下NAND FLASH的缺点就是存在位反转,而这也可以有方法解决:
解决:
1、写PAGE
2、生成ECC码
3、把ECC写入OOB
读1、读PAGE
2、读OOB里的ECC
3、重新计算ECC
4、比较计算的ECC与读出的ECC。计算出哪一位发生了位反转。
采用软件的方法计算ECC,只要让s3c_nand->ecc.mode = NAND_ECC_SOFT;就可以实现。
下面进行代码的测试:
测试:
1、make menuconfig去掉内核自带的nand flash驱动
2、make uImage
使用新内核启动,并且使用NFS作为根文件系统
3、insmod insmod S3c_nand.ko后产生12个设备:8个字符设备、4个块设备
4、mount -t jffs2 /dev/mtdblock3 /mnt
5、格式化 (参考下面编译工具)
6、挂接
编译工具:
1、tar xjf mtd-utils-05.7.23.tar.bz2
2、cd mtd-utils-05.07.23/util
3、修改Makefile
#CROSS=arm-linux-
改为CROSS=arm-linux-
4、make
5、cp flash_erase flash_eraseall /work/nfs_andy/first_fs/bin/
6、flash_eraseall /dev/mtd3
7、mount -t jffs2 /dev/mtdblock3 /mnt
可以看到mnt下面有之前的文件系统,到这里NAND FLASH驱动测试成功。
NAND FLASH驱动框架以及程序实现的更多相关文章
- 15.1 linux操作系统下nand flash驱动框架2
当我们需要在操作系统上读写普通文件的时候,总是需要一层层往下,最终到达硬件相关操作,当然底层设备大多数都是块设备 NAND FLASH就作为一个最底层的块设备. 而写驱动,就是要构建硬件与操作系统之间 ...
- Nand Flash 驱动框架
框架入口源文件:s3c_nand.c (可根据入口源文件,再按着框架到内核走一遍) 内核版本:linux_2.6.22.6 硬件平台:JZ2440 以下是驱动框架: 以下是驱动代码 s3c_nan ...
- 【驱动】linux系统下nand flash驱动程序框架
linux操作系统下nand flash驱动框架 当我们需要在操作系统上读写普通文件的时候,总是需要一层层往下,最终到达硬件相关操作,当然底层设备大多数都是块设备 NAND FLASH就作为一个最底层 ...
- 如何编写linux下nand flash驱动-2
[Nand Flash引脚(Pin)的说明] 图3.Nand Flash引脚功能说明 上图是常见的Nand Flash所拥有的引脚(Pin)所对应的功能,简单翻译如下: 1. I/O0 ~ ...
- 如何编写linux下nand flash驱动-4
2. 软件方面 如果想要在Linux下编写Nand Flash驱动,那么就先要搞清楚Linux下,关于此部分的整个框架.弄明白,系统是如何管理你的nand flash的,以及,系统都帮你做 ...
- 15、NAND FLASH驱动程序框架
驱动可以参考At91_nand.c,这个比S3c2410.c (drivers\mtd\nand)简单多了 NAND FLASH是一个存储芯片那么: 这样的操作很合理"读地址A的数据,把数据 ...
- 十八、Nand Flash驱动和Nor Flash驱动
在读者学习本章之前,最好了解Nand Flash读写过程和操作,可以参考:Nand Flash裸机操作. 一开始想在本章写eMMC框架和设备驱动,但是没有找到关于eMMC设备驱动具体写法,所以本章仍继 ...
- Smart210学习记录----nand flash驱动
[详解]如何编写Linux下Nand Flash驱动 :http://www.cnblogs.com/linux-rookie/articles/3016990.html 当读写文件请求到来的时候, ...
- Nand Flash驱动(实现初始化以及读操作)
简单制作一个Nand Flash驱动(只需要初始化Flash以及读Flash) 打开2440芯片手册,K9F2G08U0M芯片手册(因为2440中Nand Flash是用的256MB(2Gb)内存,8 ...
随机推荐
- 8组 上课啦(Class BUddy Pro)使用体验
下载上课啦app 进入页面显示的是一个第1周的课表,和可以看到本周为第几周,点击周可以调整第几周显示课表 ,课表内容为整周内容,本周内容一目了然.点击右上角可以进入主设置页面,设置页面可以设置静音模式 ...
- 如何规范git commit提交
相信很多人使用SVN.Git等版本控制工具时候都会觉得每次提交都要写一个注释有什么用啊?好麻烦,所以我每次都是随便写个数字就提交了,但是慢慢的我就发现了,如果项目长期维护或者修改很久之前的项目,没有一 ...
- Maximum Element In A Stack Gym - 102222A【思维+栈】
2018-2019 ACM-ICPC, China Multi-Provincial Collegiate Programming Contest https://vjudge.net/problem ...
- C语言二级选择题考点汇总-数据结构与算法-【考点一】 什么是算法
1.算法及其基本特征 算法是指对方案的准确描述,是解决问题的执行步骤. 算法不等于数学上的计算方法,也不等于程序.程序是算法的载体. 算法的基本特征如下: (1)可行性:步骤可实现,执行结果可达到 ...
- Tomcat中使用JNDI配置各种数据源
最近接手了一个离职同事的老项目,全是XML配的,看的我贼难受,不过了解下配置原理还是有好处的 1.MySql <Resource name ="cockpitTest" au ...
- Python-Django学习笔记(四)-views的编写以及urls分发器的配置
MTV中的V表示的是Views,视图函数(或简称视图)只是一个Python函数,它接受Web请求并返回Web响应. 通俗的理解可以理解为后端控制器. (响应可以是网页的HTML内容,重定向,404错误 ...
- 浅识mysql主键
primary key:主键,又叫主键约束. primary key在表中是唯一代表一条记录的.primary key可以是1列,或者多列组合而成的. 如何查看一个表的主键是什么,举个例子: desc ...
- vConsole 让你在手机上也能轻松调试网页
有时候为了想在手机真机上对网页进行 Debug,可手机上没有 F12,用 Chrome DevTools 连接手机操作又太过复杂.VConsole 的出现,正好解决了这一痛点! (下列内容照搬一下官方 ...
- jquery赋值
$("#test1").text("Hello world!"); $("#test2").html("<b>Hell ...
- thinkphp3.2短信群发项目实例
项目功能是企业给客户群发短信,我就写这么多,也不知道你能不能运行成功,如果有问题可以在QQ上问我:605114821 项目文件SMS_V2.zip下载地址,百度云:http://yun.baidu.c ...