CUDA C Programming Guide 在线教程学习笔记 Part 2
▶ 纹理内存使用
● 纹理内存使用有两套 API,称为 Object API 和 Reference API 。纹理对象(texture object)在运行时被 Object API 创建,同时指定了纹理单元。纹理引用(Tezture Reference)在编译时被 Reference API 创建,但是在运行时才指定纹理单元,并将纹理引用绑定到纹理单元上面去。
● 不同的纹理引用可能绑定到相同或内存上有重叠的的纹理单元上,纹理单元可能是 CUDA 线性内存或CUDA array 的任意部分。
● 可以定义一维到三维的数组作为纹理内存。数组中的元素简称 texel (texture element)。
● 纹理内存的数据类型可以是 char, int, long, long long, float, double,即所有基本的占用1、2、4字节的数据类型。
● 纹理内存的访问模式有 cudaReadModeNormalizedFloat 和 cudaReadModeElementType 两种。前者读取 4 字节整数时会除以 0x8fff(有符号整数)或 0xffff(无符号整数),从而把值线性映射到 [-1.0, 1.0] 区间(有符号整数)或 [0, 1] 区间(无符号整数),读取 2 字节整数时也会发生类似变换,除以 0x8f 或 0xff 。后者则不会发生这种转换。
● 纹理数组使用浮点坐标进行引用。长为 N 的一维数组,默认纹理坐标中,下标范围是 [0.0, N-1] 之间的浮点数;正规化纹理坐标中,下标范围是 [0.0, 1-1/N] 之间的浮点数。二维或三维数组每一维上的坐标也遵循这个原则。
● 寻址模式,可以对数组范围以外的坐标进行访问(越界访问),不同的寻址模式定义了这种操作的效果。默认寻址模式 cudaAddressModeClamp 下,越界访问取各维上的边界值;边界模式 cudaAddressModeBorder 下,越界访问会返回 0 。使用正规化坐标时,可以选用束模式和镜像模式,束模式 cudaAddressModeWrap(想象成左右边界相连)下,越界坐标做变换 x' = x - floor(x) (教程上少了 减号);镜像模式 cudaAddressModeMirror(想象成 左 ~ 右 → 右 ~ 左 → 左 ~ 右)下,越界坐标做变换 x' = x(floor(x) 为偶数)或 x' = 1 - x(floor(x) 为奇数)。
● 滤波模式,决定了如何把整数坐标的数组数据值转化为浮点坐标的引用值。最临近插值 cudaFilterModePoint 使用最接近访问坐标的整数坐标点数据,可以返回整数值(若纹理数组本身是整数型);线性插值 cudaFilterModeLinear 使用每维度上最接近访问坐标的两个整数坐标点数据进行插值,可以单线性(一维,2 点)、双线性(二维,4 点)和三线性(三维,8 点),只能返回浮点数值。
● 使用 Texture Object API 。
■ 涉及的结构定义、接口函数。
// texture_types.h
struct __device_builtin__ cudaTextureDesc
{
enum cudaTextureAddressMode addressMode[]; // 寻址模式,cudaResourceDesc::resType == cudaResourceTypeLinear 时无效
enum cudaTextureFilterMode filterMode; // 滤波模式,cudaResourceDesc::resType == cudaResourceTypeLinear 时无效
enum cudaTextureReadMode readMode; // 访问模式
int sRGB; // ?读取时将sRGB范围正规化
float borderColor[]; // ?文理边界颜色
int normalizedCoords; // 是否使用正规化坐标
unsigned int maxAnisotropy; // ?
enum cudaTextureFilterMode mipmapFilterMode; // ?
float mipmapLevelBias; // ?
float minMipmapLevelClamp;// ?
float maxMipmapLevelClamp;// ?
}; enum __device_builtin__ cudaTextureAddressMode
{
cudaAddressModeWrap = ,
cudaAddressModeClamp = ,
cudaAddressModeMirror = ,
cudaAddressModeBorder =
}; enum __device_builtin__ cudaTextureFilterMode
{
cudaFilterModePoint = ,
cudaFilterModeLinear =
}; enum __device_builtin__ cudaTextureReadMode
{
cudaReadModeElementType = ,
cudaReadModeNormalizedFloat =
}; typedef __device_builtin__ unsigned long long cudaTextureObject_t; // driver_types.h
enum __device_builtin__ cudaChannelFormatKind
{
cudaChannelFormatKindSigned = , // 有符号整数模式
cudaChannelFormatKindUnsigned = , // 无符号整数模式
cudaChannelFormatKindFloat = , // 浮点模式
cudaChannelFormatKindNone = // 无通道模式
}; struct __device_builtin__ cudaChannelFormatDesc
{
int x; // 通道 0 数据位深度
int y; // 通道 1 数据位深度
int z; // 通道 2 数据位深度
int w; // ?
enum cudaChannelFormatKind f; // 通道模式
}; typedef struct cudaArray *cudaArray_t;
typedef struct cudaMipmappedArray *cudaMipmappedArray_t; enum __device_builtin__ cudaResourceType
{
cudaResourceTypeArray = 0x00, // 数组资源
cudaResourceTypeMipmappedArray = 0x01, // 映射数组资源
cudaResourceTypeLinear = 0x02, // 线性资源
cudaResourceTypePitch2D = 0x03 // 对齐二维资源
}; struct __device_builtin__ cudaResourceDesc
{
enum cudaResourceType resType; // 资源类型 union res
{
struct array // cuda数组
{
cudaArray_t array;
};
struct mipmap // mipmap 数组
{
cudaMipmappedArray_t mipmap;
};
struct linear // 一维数组
{
void *devPtr; // 设备指针,符合 cudaDeviceProp::textureAlignment 的对齐要求
struct cudaChannelFormatDesc desc; // texel 的属性描述
size_t sizeInBytes; // 数组字节数
};
struct pitch2D // 二位数组
{
void *devPtr; // 设备指针,符合 cudaDeviceProp::textureAlignment 的对齐要求
struct cudaChannelFormatDesc desc; // texel 的属性描述
size_t width; // 数组列数
size_t height; // 数组行数
size_t pitchInBytes; // 数组行字节数
};
};
}; // cuda_runtime_api.h extern __host__ struct cudaChannelFormatDesc CUDARTAPI cudaCreateChannelDesc(int x, int y, int z, int w, enum cudaChannelFormatKind f); extern __host__ cudaError_t CUDARTAPI cudaMallocArray(cudaArray_t *array, const struct cudaChannelFormatDesc *desc, size_t width, size_t height __dv(), unsigned int flags __dv()); extern __host__ cudaError_t CUDARTAPI cudaMemcpyToArray(cudaArray_t dst, size_t wOffset, size_t hOffset, const void *src, size_t count, enum cudaMemcpyKind kind); extern __host__ cudaError_t CUDARTAPI cudaCreateTextureObject(cudaTextureObject_t *pTexObject, const struct cudaResourceDesc *pResDesc, const struct cudaTextureDesc *pTexDesc, const struct cudaResourceViewDesc *pResViewDesc); extern __host__ cudaError_t CUDARTAPI cudaDestroyTextureObject(cudaTextureObject_t texObject);
■ 完整的应用样例代码。初始化一个 32×32 的矩阵,利用纹理对其进行平移和旋转,输出调整之后的矩阵。
#include <stdio.h>
#include <stdlib.h>
#include <malloc.h>
#include <cuda_runtime_api.h>
#include "device_launch_parameters.h" #define DEGRE_TO_RADIAN(x) ((x) * 3.1416f / 180)
#define CEIL(x,y) (((x) + (y) - 1) / (y) + 1) // 简单的线性变换
__global__ void transformKernel(float* output, cudaTextureObject_t texObj, int width, int height, float theta)
{
// 计算正规化纹理坐标
unsigned int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int idy = blockIdx.y * blockDim.y + threadIdx.y; // 正规化和平移
float u = idx / (float)width - 0.5f;
float v = idy / (float)height - 0.5f; // 旋转
float tu = u * __cosf(theta) - v * __sinf(theta) + 0.5f;
float tv = v * __cosf(theta) + u * __sinf(theta) + 0.5f; //printf("\n(%2d,%2d,%2d,%2d)->(%f,%f,%f)",
// blockIdx.x, blockIdx.y, threadIdx.x, threadIdx.y, tu, tv,tex2D<float>(texObj, tu, tv)); // 纹理内存写入全局内存
output[idy * width + idx] = tex2D<float>(texObj, tu, tv);
} int main()
{
// 基本数据
int i;
float *h_data, *d_data;
int width = ;
int height = ;
float angle = DEGRE_TO_RADIAN(); int size = sizeof(float)*width*height;
h_data = (float *)malloc(size);
cudaMalloc((void **)&d_data, size); for (i = ; i < width*height; i++)
h_data[i] = (float)i; printf("\n\n");
for (i = ; i < width*height; i++)
{
printf("%6.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n");
} // 申请 cuda 数组并拷贝数据
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(, , , ,cudaChannelFormatKindFloat);
cudaArray* cuArray;
cudaMallocArray(&cuArray, &channelDesc, width, height);
cudaMemcpyToArray(cuArray, , , h_data, size, cudaMemcpyHostToDevice); // 指定纹理资源
struct cudaResourceDesc resDesc;
memset(&resDesc, , sizeof(resDesc));
resDesc.resType = cudaResourceTypeArray;
resDesc.res.array.array = cuArray; // 指定纹理对象参数
struct cudaTextureDesc texDesc;
memset(&texDesc, , sizeof(texDesc));
texDesc.addressMode[] = cudaAddressModeWrap;
texDesc.addressMode[] = cudaAddressModeWrap;
texDesc.filterMode = cudaFilterModeLinear;
texDesc.readMode = cudaReadModeElementType;
texDesc.normalizedCoords = ; // 创建文理对象
cudaTextureObject_t texObj = ;
cudaCreateTextureObject(&texObj, &resDesc, &texDesc, NULL); // 运行核函数
dim3 dimBlock(, );
dim3 dimGrid(CEIL(width, dimBlock.x), CEIL(height, dimBlock.y));
transformKernel << <dimGrid, dimBlock >> > (d_data, texObj, width, height, angle);
cudaDeviceSynchronize(); // 结果回收和检查结果
cudaMemcpy(h_data, d_data, size, cudaMemcpyDeviceToHost); printf("\n\n");
for (i = ; i < width*height; i++)
{
printf("%6.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n");
} // 回收工作
cudaDestroyTextureObject(texObj);
cudaFreeArray(cuArray);
cudaFree(d_data); getchar();
return ;
}
● 使用 Texture Reference API。
■ 纹理引用的一些只读属性需要在声明的时候指定,以便编译时提前确定,只能在全局作用域内静态指定,不能作为参数传递给函数。使用 texture 指定纹理引用属性,Datatype 为 texel 的数据类型,Type 为纹理引用类型,有 7 种,默认 cudaTextureType1D,ReadMode 为访问类型,默认 cudaReadModeElementType ,其他属性可以在主机运行时动态的修改。
texture<DataType, Type, ReadMode> texRef; // cuda_texture_types.h
template<class T, int texType = cudaTextureType1D, enum cudaTextureReadMode mode = cudaReadModeElementType>
struct __device_builtin_texture_type__ texture : public textureReference
{
#if !defined(__CUDACC_RTC__)
__host__ texture(int norm = , enum cudaTextureFilterMode fMode = cudaFilterModePoint, enum cudaTextureAddressMode aMode = cudaAddressModeClamp)
{
normalized = norm;
filterMode = fMode;
addressMode[] = aMode;
addressMode[] = aMode;
addressMode[] = aMode;
channelDesc = cudaCreateChannelDesc<T>();
sRGB = ;
}
__host__ texture(int norm, enum cudaTextureFilterMode fMode, enum cudaTextureAddressMode aMode, struct cudaChannelFormatDesc desc)
{
normalized = norm;
filterMode = fMode;
addressMode[] = aMode;
addressMode[] = aMode;
addressMode[] = aMode;
channelDesc = desc;
sRGB = ;
}
#endif
}; //texture_types.h
#define cudaTextureType1D 0x01
#define cudaTextureType2D 0x02
#define cudaTextureType3D 0x03
#define cudaTextureTypeCubemap 0x0C
#define cudaTextureType1DLayered 0xF1
#define cudaTextureType2DLayered 0xF2
#define cudaTextureTypeCubemapLayered 0xFC
■ 涉及的结构定义、接口函数。纹理引用必须用函数 cudaBindTexture() 或 cudaBindTexture2D() 或 cudaBindTextureToArray() 绑定到相应维度的数组上才能使用,要求纹理引用的维度、数据类型与该数组匹配,否则操作时未定义的,使用完后还要用函数 cudaUnbindTexture() 解除绑定。
// texture_types.h
struct __device_builtin__ textureReference
{
int normalized; // 是否使用正规化坐标
enum cudaTextureFilterMode filterMode; // 滤波模式
enum cudaTextureAddressMode addressMode[]; // 寻址模式
struct cudaChannelFormatDesc channelDesc; // texel 的格式,其元素数据类型与声明 texture 时的 Datatype 一致
int sRGB; // ?读取时将sRGB范围正规化
unsigned int maxAnisotropy; // ?
enum cudaTextureFilterMode mipmapFilterMode; // ?
float mipmapLevelBias; // ?
float minMipmapLevelClamp; // ?
float maxMipmapLevelClamp; // ?
int __cudaReserved[]; // ?
}; // cuda_runtime_api.h
extern __host__ cudaError_t CUDARTAPI cudaBindTexture(size_t *offset, const struct textureReference *texref, const void *devPtr, const struct cudaChannelFormatDesc *desc, size_t size __dv(UINT_MAX)); extern __host__ cudaError_t CUDARTAPI cudaBindTexture2D(size_t *offset, const struct textureReference *texref, const void *devPtr, const struct cudaChannelFormatDesc *desc, size_t width, size_t height, size_t pitch); extern __host__ cudaError_t CUDARTAPI cudaBindTextureToArray(const struct textureReference *texref, cudaArray_const_t array, const struct cudaChannelFormatDesc *desc); extern __host__ cudaError_t CUDARTAPI cudaUnbindTexture(const struct textureReference *texref); extern __host__ cudaError_t CUDARTAPI cudaGetTextureReference(const struct textureReference **texref, const void *symbol);
■ 将 2D 纹理引用绑定到 2D 数组上的范例代码
// 准备工作
texture<float, cudaTextureType2D, cudaReadModeElementType> texRef; ... int width, height;
size_t pitch;
float *d_data;
cudaMallocPitch((void **)&d_data, &pitch, sizeof(float)*width, height); // 第一种方法,低层 API
textureReference* texRefPtr;
cudaGetTextureReference(&texRefPtr, &texRef);
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc<float>();
size_t offset;
cudaBindTexture2D(&offset, texRefPtr, d_data, &channelDesc, width, height, pitch); // 第二种方法,高层 API
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc<float>();
size_t offset;
cudaBindTexture2D(&offset, texRef, d_data, channelDesc, width, height, pitch);
■ 将 2D 纹理引用绑定到 cuda 数组上的范例代码
// 准备工作
texture<float, cudaTextureType2D, cudaReadModeElementType> texRef; //... cudaArray* cuArray;
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(, , , , cudaChannelFormatKindFloat);
cudaMallocArray(&cuArray, &channelDesc, width, height); // 第一种方法,低层 API
textureReference* texRefPtr;
cudaGetTextureReference(&texRefPtr, &texRef);
memset(&channelDesc, , sizeof(cudaChannelFormatDesc));
cudaChannelFormatDesc channelDesc;
cudaGetChannelDesc(&channelDesc, cuArray);
cudaBindTextureToArray(texRef, cuArray, &channelDesc); // 第二种方法,高层 API
cudaBindTextureToArray(texRef, cuArray);
■ 完整的应用样例代码。与前面纹理对象代码的功能相同。
#include <stdio.h>
#include <stdlib.h>
#include <malloc.h>
#include <cuda_runtime_api.h>
#include "device_launch_parameters.h" #define DEGRE_TO_RADIAN(x) ((x) * 3.1416f / 180)
#define CEIL(x,y) (((x) + (y) - 1) / (y) + 1) // 声明纹理引用
texture<float, cudaTextureType2D, cudaReadModeElementType> texRef; // 简单的线性变换
__global__ void transformKernel(float* output, int width, int height, float theta)
{
// 计算正规化纹理坐标
unsigned int idx = blockIdx.x * blockDim.x + threadIdx.x;
unsigned int idy = blockIdx.y * blockDim.y + threadIdx.y; // 正规化和平移
float u = idx / (float)width;
float v = idy / (float)height; // 旋转
float tu = u * __cosf(theta) - v * __sinf(theta) + 0.5f;
float tv = v * __cosf(theta) + u * __sinf(theta) + 0.5f; //printf("\n(%2d,%2d,%2d,%2d)->(%f,%f,%f)",
// blockIdx.x, blockIdx.y, threadIdx.x, threadIdx.y, tu, tv,tex2D<float>(texObj, tu, tv)); // 纹理内存写入全局内存
output[idy * width + idx] = tex2D(texRef, tu, tv);
} int main()
{
// 基本数据
int i;
float *h_data, *d_data;
int width = ;
int height = ;
float angle = DEGRE_TO_RADIAN(); int size = sizeof(float)*width*height;
h_data = (float *)malloc(size);
cudaMalloc((void **)&d_data, size); for (i = ; i < width*height; i++)
h_data[i] = (float)i; printf("\n\n");
for (i = ; i < width*height; i++)
{
printf("%6.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n");
} // 申请 cuda 数组并拷贝数据
cudaChannelFormatDesc channelDesc = cudaCreateChannelDesc(, , , , cudaChannelFormatKindFloat);
cudaArray* cuArray;
cudaMallocArray(&cuArray, &channelDesc, width, height);
cudaMemcpyToArray(cuArray, , , h_data, size, cudaMemcpyHostToDevice); // 指定纹理引用参数,注意与纹理对象的使用不一样
texRef.addressMode[] = cudaAddressModeWrap;
texRef.addressMode[] = cudaAddressModeWrap;
texRef.filterMode = cudaFilterModeLinear;
texRef.normalized = ; // 绑定纹理引用
cudaBindTextureToArray(texRef, cuArray, channelDesc); // 运行核函数
dim3 dimBlock(, );
dim3 dimGrid(CEIL(width, dimBlock.x), CEIL(height, dimBlock.y));
transformKernel << <dimGrid, dimBlock >> > (d_data, width, height, angle);
cudaDeviceSynchronize(); // 结果回收和检查结果
cudaMemcpy(h_data, d_data, size, cudaMemcpyDeviceToHost); printf("\n\n");
for (i = ; i < width*height; i++)
{
printf("%6.1f ", h_data[i]);
if ((i + ) % width == )
printf("\n");
} // 回收工作
cudaFreeArray(cuArray);
cudaFree(d_data); getchar();
return ;
}
▶ 半精度浮点数。
■ CUDA 没有原生支持半精度浮点数据类型,可以把半精度数据存储在 short 数据类型中,在需要计算的时候用内建函数将其与浮点类型进行转换。
■ 这些函数只能在设备代码中使用,可以在 OpenEXR 库中找到其等价的函数。
■ 在纹理计算过程中,半精度浮点数默认转化为单精度浮点数。
// cuda_fp16.h
__CUDA_FP16_DECL__ float __half2float(const __half h)
{
float val;
asm volatile("{ cvt.f32.f16 %0, %1;}\n" : "=f"(val) : "h"(h.x));
return val;
}
__CUDA_FP16_DECL__ __half2 __float2half2_rn(const float f)
{
__half2 val;
asm("{.reg .f16 low;\n"
" cvt.rn.f16.f32 low, %1;\n"
" mov.b32 %0, {low,low};}\n" : "=r"(val.x) : "f"(f));
return val;
}
▶ 分层纹理 Layered Texture
● 在 Direct3D 中叫 texture array,在 OpenGL 中叫 array texture 。
● 一组分层纹理是由若干相同维度、尺寸和数据类型的的纹理内存构成的,相当于多了一个整数下标的维度。支持一维分层纹理和二维分层纹理。
● 一维分层纹理使用一个整数和一个浮点数作为坐标进行访问;二维分层纹理使用一个整数和两个浮点数作为坐标进行访问。
● 分层纹理只能使用函数 cudaMalloc3DArray() 加上 cudaArrayLayered 标志来声明,使用函数 tex1DLayered() 和 tex2DLayered() 来进行访问。滤波只在同一层内部进行,不会跨层执行。
● 分层纹理在书《CUDA专家手册》中讲的稍微详细一点,看完再来填坑。
▶ 立方体贴图纹理 Cubemap Textures
● 一种特殊的二维分层纹理,共六个尺寸相同的、宽度等于高度的二维纹理构成,代表了正方体的六个面。
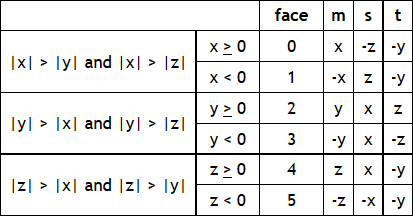
● 使用三个浮点数的有序组 (x, y, z) 来定义立方体贴图纹理的层号和表面坐标,按照以下表格分情况讨论。各表面坐标按照((s / m + 1) / 2, (t / m + 1) / 2)计算。
● 立方体贴图纹理只能使用函数 cudaMalloc3DArray() 加上 cudaArrayCubemap 标志来声明,使用函数 texCubemap() 来访问。
▶ 分层立方体贴图纹理 Cubemap Layered Textures
● 一种分层纹理内存,由若干尺寸相同的立方体贴图纹理构成。使用一个整数下标和三个浮点数有序组来定义层号和面号、表面坐标。
● 分层立方体贴图纹理只能使用函数 cudaMAlloc3DArray() 加上 cudaArrayLayered 和 cudaArrayCubemap 标志来声明,使用函数 texCubemapLayered() 来进行访问滤波只在同一层内部进行,不会跨层执行。
▶ 纹理汇集。
● 使用函数 tex2Dgather() 来抽取二维纹理内存的特定内容,没看懂。
// texture_fetch_functions.h
template <typename T>
static __device__ typename __nv_tex2dgather_ret<T>::type tex2Dgather(texture<T, cudaTextureType2D, cudaReadModeElementType>, float, float, int = ) { }
▶ 压缩版的 texture_types.h。所有内容在本文中都有体现。
#if !defined(__TEXTURE_TYPES_H__)
#define __TEXTURE_TYPES_H__ #include "driver_types.h" #define cudaTextureType1D 0x01
#define cudaTextureType2D 0x02
#define cudaTextureType3D 0x03
#define cudaTextureTypeCubemap 0x0C
#define cudaTextureType1DLayered 0xF1
#define cudaTextureType2DLayered 0xF2
#define cudaTextureTypeCubemapLayered 0xFC // CUDA texture address modes
enum __device_builtin__ cudaTextureAddressMode
{
cudaAddressModeWrap = , // Wrapping address mode
cudaAddressModeClamp = , // Clamp to edge address mode
cudaAddressModeMirror = , // Mirror address mode
cudaAddressModeBorder = // Border address mode
}; // CUDA texture filter modes
enum __device_builtin__ cudaTextureFilterMode
{
cudaFilterModePoint = , // Point filter mode
cudaFilterModeLinear = // Linear filter mode
}; // CUDA texture read modes
enum __device_builtin__ cudaTextureReadMode
{
cudaReadModeElementType = , // Read texture as specified element type
cudaReadModeNormalizedFloat = // Read texture as normalized float
}; // CUDA texture reference
struct __device_builtin__ textureReference
{
// Indicates whether texture reads are normalized or not
int normalized;
// Texture filter mode
enum cudaTextureFilterMode filterMode;
// Texture address mode for up to 3 dimensions
enum cudaTextureAddressMode addressMode[];
// Channel descriptor for the texture reference
struct cudaChannelFormatDesc channelDesc;
// Perform sRGB->linear conversion during texture read
int sRGB;
// Limit to the anisotropy ratio
unsigned int maxAnisotropy;
// Mipmap filter mode
enum cudaTextureFilterMode mipmapFilterMode;
// Offset applied to the supplied mipmap level
float mipmapLevelBias;
// Lower end of the mipmap level range to clamp access to
float minMipmapLevelClamp;
// Upper end of the mipmap level range to clamp access to
float maxMipmapLevelClamp;
int __cudaReserved[];
}; // CUDA texture descriptor
struct __device_builtin__ cudaTextureDesc
{
// Texture address mode for up to 3 dimensions
enum cudaTextureAddressMode addressMode[];
// Texture filter mode
enum cudaTextureFilterMode filterMode;
// Texture read mode
enum cudaTextureReadMode readMode;
// Perform sRGB->linear conversion during texture read
int sRGB;
// Texture Border Color
float borderColor[];
// Indicates whether texture reads are normalized or not
int normalizedCoords;
// Limit to the anisotropy ratio
unsigned int maxAnisotropy;
// Mipmap filter mode
enum cudaTextureFilterMode mipmapFilterMode;
// Offset applied to the supplied mipmap level
float mipmapLevelBias;
// Lower end of the mipmap level range to clamp access to
float minMipmapLevelClamp;
// Upper end of the mipmap level range to clamp access to
float maxMipmapLevelClamp;
}; // An opaque value that represents a CUDA texture object
typedef __device_builtin__ unsigned long long cudaTextureObject_t; #endif
CUDA C Programming Guide 在线教程学习笔记 Part 2的更多相关文章
- CUDA C Programming Guide 在线教程学习笔记 Part 5
附录 A,CUDA计算设备 附录 B,C语言扩展 ▶ 函数的标识符 ● __device__,__global__ 和 __host__ ● 宏 __CUDA_ARCH__ 可用于区分代码的运行位置. ...
- CUDA C Programming Guide 在线教程学习笔记 Part 4
▶ 图形互操作性,OpenGL 与 Direct3D 相关.(没学过,等待填坑) ▶ 版本号与计算能力 ● 计算能力(Compute Capability)表征了硬件规格,CUDA版本号表征了驱动接口 ...
- CUDA C Programming Guide 在线教程学习笔记 Part 10【坑】
▶ 动态并行. ● 动态并行直接从 GPU 上创建工作,可以减少主机和设备间数据传输,在设备线程中调整配置.有数据依赖的并行工作可以在内核运行时生成,并利用 GPU 的硬件调度和负载均衡.动态并行要求 ...
- CUDA C Programming Guide 在线教程学习笔记 Part 13
▶ 纹理内存访问补充(见纹理内存博客 http://www.cnblogs.com/cuancuancuanhao/p/7809713.html) ▶ 计算能力 ● 不同计算能力的硬件对计算特性的支持 ...
- CUDA C Programming Guide 在线教程学习笔记 Part 9
▶ 协作组,要求 cuda ≥ 9.0,一个简单的例子见 http://www.cnblogs.com/cuancuancuanhao/p/7881093.html ● 灵活调节需要进行通讯的线程组合 ...
- CUDA C Programming Guide 在线教程学习笔记 Part 8
▶ 线程束表决函数(Warp Vote Functions) ● 用于同一线程束内各线程通信和计算规约指标. // device_functions.h,cc < 9.0 __DEVICE_FU ...
- CUDA C Programming Guide 在线教程学习笔记 Part 7
▶ 可缓存只读操作(Read-Only Data Cache Load Function),定义在 sm_32_intrinsics.hpp 中.从地址 adress 读取类型为 T 的函数返回,T ...
- CUDA C Programming Guide 在线教程学习笔记 Part 3
▶ 表面内存使用 ● 创建 cuda 数组时使用标志 cudaArraySurfaceLoadStore 来创建表面内存,可以用表面对象(surface object)或表面引用(surface re ...
- CUDA C Programming Guide 在线教程学习笔记 Part 1
1. 简介 2. 编程模型 ▶ SM version 指的是硬件构架和特性,CUDA version 指的是软件平台版本. 3. 编程接口.参考 http://chenrudan.github.io/ ...
随机推荐
- 第三周作业3——Bug Report
作业要求来自:https://edu.cnblogs.com/campus/nenu/SWE2017FALL/homework/957 要求1: 准备工作:利用老师提供的git 命令,批量pull所有 ...
- 最优比率生成树 POJ 2728 迭代或者二分
别人解题报告的链接: http://blog.sina.com.cn/s/blog_691190870101626q.html 说明一下关于精度的问题,当结果是精确到小数点后3为,你自然要把误差定为至 ...
- 迭代器Iterator的底层实现原理
第一步:没有接口的迭代器简单实现原理 package com.bjsxt.xiaofei; /** * 迭代器底层原理 * 方法: * hasNext() * next() * remove() * ...
- WPF控件NumericUpDown (转)
WPF控件NumericUpDown示例 (转载请注明出处) 工具:Expression Blend 2 + Visual Studio 2008 语言:C# 框架:.Net Framework 3. ...
- Oracle:Decode在时间范围中的使用
做查询的时候需要下一个sql,需要select test_time出来,如果test_Time的HH24:Mi:SS在7:00:00和19:00:00返回白班,否则返回夜班 select case w ...
- C# 使用oledb 方式连接本地或者远程oracel 数据库的方式
对于C# 进行oracle 数据库的开发来说使用oracle 提供的odp.net 方式是比较方便的,同时在性能以及兼容性也是比较好的 但是,对于不打算使用的,那么该如何使用oledb 进行连接 连接 ...
- 【转】每天一个linux命令(31): /etc/group文件详解
原文网址:http://www.cnblogs.com/peida/archive/2012/12/05/2802419.html Linux /etc/group文件与/etc/passwd和/et ...
- bzoj 4556 [Tjoi2016&Heoi2016]字符串——后缀数组+主席树
题目:https://www.lydsy.com/JudgeOnline/problem.php?id=4556 本来只要查 ht[ ] 数组上的前驱和后继就行,但有长度的限制.可以二分答案解决!然后 ...
- vue2.0 不引用第三方包的情况下实现嵌套对象的拖拽排序功能
先上一张效果图,然后再上代码(由于只做效果,未做数据相关的处理:实际处理数据时不修改 dom 元素,只是利用 dom 元素传递数据,然后需改数据,靠数据驱动效果) <div :id=" ...
- Delphi调用网页美化SQL
百度搜索在线美化SQL语句的网站,为了加快解析速度,这里已下载到本地. 然后delphi用webbrowse载入本地的网页,然后把sql传进去,美化后取出来. 效果如下图 点击下载源码