ChibiOS/RT 2.6.9 CAN Driver
Detailed Description
Generic CAN Driver.
This module implements a generic CAN (Controller Area Network) driver allowing the exchange of information at frame level.
- Precondition:
- In order to use the CAN driver the
HAL_USE_CANoption must be enabled inhalconf.h.
Driver State Machine
The driver implements a state machine internally, not all the driver functionalities can be used in any moment,
any transition not explicitly shown in the following diagram has to be considered an error and shall be captured by an assertion (if enabled).

/*
00002 ChibiOS/RT - Copyright (C) 2006-2013 Giovanni Di Sirio
00003
00004 Licensed under the Apache License, Version 2.0 (the "License");
00005 you may not use this file except in compliance with the License.
00006 You may obtain a copy of the License at
00007
00008 http://www.apache.org/licenses/LICENSE-2.0
00009
00010 Unless required by applicable law or agreed to in writing, software
00011 distributed under the License is distributed on an "AS IS" BASIS,
00012 WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
00013 See the License for the specific language governing permissions and
00014 limitations under the License.
00015 */ /**
00018 * @file templates/can_lld.h
00019 * @brief CAN Driver subsystem low level driver header template.
00020 *
00021 * @addtogroup CAN
00022 * @{
00023 */ #ifndef _CAN_LLD_H_
#define _CAN_LLD_H_ #if HAL_USE_CAN || defined(__DOXYGEN__) /*===========================================================================*/
/* Driver constants. */
/*===========================================================================*/ /**
00035 * @brief This switch defines whether the driver implementation supports
00036 * a low power switch mode with automatic an wakeup feature.
00037 */
#define CAN_SUPPORTS_SLEEP TRUE /**
00041 * @brief This implementation supports three transmit mailboxes.
00042 */
#define CAN_TX_MAILBOXES 3 /**
00046 * @brief This implementation supports two receive mailboxes.
00047 */
#define CAN_RX_MAILBOXES 2 /*===========================================================================*/
/* Driver pre-compile time settings. */
/*===========================================================================*/ /**
00055 * @name Configuration options
00056 * @{
00057 */
/**
00059 * @brief CAN1 driver enable switch.
00060 * @details If set to @p TRUE the support for CAN1 is included.
00061 */
#if !defined(PLATFORM_CAN_USE_CAN1) || defined(__DOXYGEN__)
#define PLATFORM_CAN_USE_CAN1 FALSE
#endif
/** @} */ /*===========================================================================*/
/* Derived constants and error checks. */
/*===========================================================================*/ #if CAN_USE_SLEEP_MODE && !CAN_SUPPORTS_SLEEP
#error "CAN sleep mode not supported in this architecture"
#endif /*===========================================================================*/
/* Driver data structures and types. */
/*===========================================================================*/ /**
00080 * @brief Type of a transmission mailbox index.
00081 */
typedef uint32_t canmbx_t; /**
00085 * @brief CAN transmission frame.
00086 * @note Accessing the frame data as word16 or word32 is not portable because
00087 * machine data endianness, it can be still useful for a quick filling.
00088 */
typedef struct {
struct {
uint8_t DLC:; /**< @brief Data length. */
uint8_t RTR:; /**< @brief Frame type. */
uint8_t IDE:; /**< @brief Identifier type. */
};
union {
struct {
uint32_t SID:; /**< @brief Standard identifier.*/
};
struct {
uint32_t EID:; /**< @brief Extended identifier.*/
};
};
union {
uint8_t data8[]; /**< @brief Frame data. */
uint16_t data16[]; /**< @brief Frame data. */
uint32_t data32[]; /**< @brief Frame data. */
};
} CANTxFrame; /**
00111 * @brief CAN received frame.
00112 * @note Accessing the frame data as word16 or word32 is not portable because
00113 * machine data endianness, it can be still useful for a quick filling.
00114 */
typedef struct {
struct {
uint8_t DLC:; /**< @brief Data length. */
uint8_t RTR:; /**< @brief Frame type. */
uint8_t IDE:; /**< @brief Identifier type. */
};
union {
struct {
uint32_t SID:; /**< @brief Standard identifier.*/
};
struct {
uint32_t EID:; /**< @brief Extended identifier.*/
};
};
union {
uint8_t data8[]; /**< @brief Frame data. */
uint16_t data16[]; /**< @brief Frame data. */
uint32_t data32[]; /**< @brief Frame data. */
};
} CANRxFrame; /**
00137 * @brief CAN filter.
00138 * @note Implementations may extend this structure to contain more,
00139 * architecture dependent, fields.
00140 * @note It could not be present on some architectures.
00141 */
typedef struct {
uint32_t dummy;
} CANFilter; /**
00147 * @brief Driver configuration structure.
00148 * @note Implementations may extend this structure to contain more,
00149 * architecture dependent, fields.
00150 * @note It could be empty on some architectures.
00151 */
typedef struct {
uint32_t dummy;
} CANConfig; /**
00157 * @brief Structure representing an CAN driver.
00158 */
typedef struct {
/**
00161 * @brief Driver state.
00162 */
canstate_t state;
/**
00165 * @brief Current configuration data.
00166 */
const CANConfig *config;
/**
00169 * @brief Transmission queue semaphore.
00170 */
Semaphore txsem;
/**
00173 * @brief Receive queue semaphore.
00174 */
Semaphore rxsem;
/**
00177 * @brief One or more frames become available.
00178 * @note After broadcasting this event it will not be broadcasted again
00179 * until the received frames queue has been completely emptied. It
00180 * is <b>not</b> broadcasted for each received frame. It is
00181 * responsibility of the application to empty the queue by
00182 * repeatedly invoking @p chReceive() when listening to this event.
00183 * This behavior minimizes the interrupt served by the system
00184 * because CAN traffic.
00185 * @note The flags associated to the listeners will indicate which
00186 * receive mailboxes become non-empty.
00187 */
EventSource rxfull_event;
/**
00190 * @brief One or more transmission mailbox become available.
00191 * @note The flags associated to the listeners will indicate which
00192 * transmit mailboxes become empty.
00193 *
00194 */
EventSource txempty_event;
/**
00197 * @brief A CAN bus error happened.
00198 * @note The flags associated to the listeners will indicate the
00199 * error(s) that have occurred.
00200 */
EventSource error_event;
#if CAN_USE_SLEEP_MODE || defined (__DOXYGEN__)
/**
00204 * @brief Entering sleep state event.
00205 */
EventSource sleep_event;
/**
00208 * @brief Exiting sleep state event.
00209 */
EventSource wakeup_event;
#endif /* CAN_USE_SLEEP_MODE */
/* End of the mandatory fields.*/
} CANDriver; /*===========================================================================*/
/* Driver macros. */
/*===========================================================================*/ /*===========================================================================*/
/* External declarations. */
/*===========================================================================*/ #if PLATFORM_CAN_USE_CAN1 && !defined(__DOXYGEN__)
extern CANDriver CAND1;
#endif #ifdef __cplusplus
extern "C" {
#endif
void can_lld_init(void);
void can_lld_start(CANDriver *canp);
void can_lld_stop(CANDriver *canp);
bool_t can_lld_is_tx_empty(CANDriver *canp,
canmbx_t mailbox);
void can_lld_transmit(CANDriver *canp,
canmbx_t mailbox,
const CANTxFrame *crfp);
bool_t can_lld_is_rx_nonempty(CANDriver *canp,
canmbx_t mailbox);
void can_lld_receive(CANDriver *canp,
canmbx_t mailbox,
CANRxFrame *ctfp);
#if CAN_USE_SLEEP_MODE
void can_lld_sleep(CANDriver *canp);
void can_lld_wakeup(CANDriver *canp);
#endif /* CAN_USE_SLEEP_MODE */
#ifdef __cplusplus
}
#endif #endif /* HAL_USE_CAN */ #endif /* _CAN_LLD_H_ */ /** @} */
/*
00002 ChibiOS/RT - Copyright (C) 2006-2013 Giovanni Di Sirio
00003
00004 Licensed under the Apache License, Version 2.0 (the "License");
00005 you may not use this file except in compliance with the License.
00006 You may obtain a copy of the License at
00007
00008 http://www.apache.org/licenses/LICENSE-2.0
00009
00010 Unless required by applicable law or agreed to in writing, software
00011 distributed under the License is distributed on an "AS IS" BASIS,
00012 WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
00013 See the License for the specific language governing permissions and
00014 limitations under the License.
00015 */ /**
00018 * @file templates/can_lld.c
00019 * @brief CAN Driver subsystem low level driver source template.
00020 *
00021 * @addtogroup CAN
00022 * @{
00023 */ #include "ch.h"
#include "hal.h" #if HAL_USE_CAN || defined(__DOXYGEN__) /*===========================================================================*/
/* Driver local definitions. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver exported variables. */
/*===========================================================================*/ /**
00039 * @brief CAN1 driver identifier.
00040 */
#if PLATFORM_CAN_USE_CAN1 || defined(__DOXYGEN__)
CANDriver CAND1;
#endif /*===========================================================================*/
/* Driver local variables and types. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver local functions. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver interrupt handlers. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver exported functions. */
/*===========================================================================*/ /**
00062 * @brief Low level CAN driver initialization.
00063 *
00064 * @notapi
00065 */
void can_lld_init(void) { #if PLATFORM_CAN_USE_CAN1
/* Driver initialization.*/
canObjectInit(&CAND1);
#endif /* PLATFORM_CAN_USE_CAN1 */
} /**
00075 * @brief Configures and activates the CAN peripheral.
00076 *
00077 * @param[in] canp pointer to the @p CANDriver object
00078 *
00079 * @notapi
00080 */
void can_lld_start(CANDriver *canp) { if (canp->state == CAN_STOP) {
/* Enables the peripheral.*/
#if PLATFORM_CAN_USE_CAN1
if (&CAND1 == canp) { }
#endif /* PLATFORM_CAN_USE_CAN1 */
}
/* Configures the peripheral.*/ } /**
00096 * @brief Deactivates the CAN peripheral.
00097 *
00098 * @param[in] canp pointer to the @p CANDriver object
00099 *
00100 * @notapi
00101 */
void can_lld_stop(CANDriver *canp) { if (canp->state == CAN_READY) {
/* Resets the peripheral.*/ /* Disables the peripheral.*/
#if PLATFORM_CAN_USE_CAN1
if (&CAND1 == canp) { }
#endif /* PLATFORM_CAN_USE_CAN1 */
}
} /**
00117 * @brief Determines whether a frame can be transmitted.
00118 *
00119 * @param[in] canp pointer to the @p CANDriver object
00120 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00121 *
00122 * @return The queue space availability.
00123 * @retval FALSE no space in the transmit queue.
00124 * @retval TRUE transmit slot available.
00125 *
00126 * @notapi
00127 */
bool_t can_lld_is_tx_empty(CANDriver *canp, canmbx_t mailbox) { (void)canp; switch (mailbox) {
case CAN_ANY_MAILBOX:
return FALSE;
case :
return FALSE;
case :
return FALSE;
case :
return FALSE;
default:
return FALSE;
}
} /**
00147 * @brief Inserts a frame into the transmit queue.
00148 *
00149 * @param[in] canp pointer to the @p CANDriver object
00150 * @param[in] ctfp pointer to the CAN frame to be transmitted
00151 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00152 *
00153 * @notapi
00154 */
void can_lld_transmit(CANDriver *canp,
canmbx_t mailbox,
const CANTxFrame *ctfp) { (void)canp;
(void)mailbox;
(void)ctfp; } /**
00166 * @brief Determines whether a frame has been received.
00167 *
00168 * @param[in] canp pointer to the @p CANDriver object
00169 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00170 *
00171 * @return The queue space availability.
00172 * @retval FALSE no space in the transmit queue.
00173 * @retval TRUE transmit slot available.
00174 *
00175 * @notapi
00176 */
bool_t can_lld_is_rx_nonempty(CANDriver *canp, canmbx_t mailbox) { (void)canp;
(void)mailbox; switch (mailbox) {
case CAN_ANY_MAILBOX:
return FALSE;
case :
return FALSE;
case :
return FALSE;
default:
return FALSE;
}
} /**
00195 * @brief Receives a frame from the input queue.
00196 *
00197 * @param[in] canp pointer to the @p CANDriver object
00198 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00199 * @param[out] crfp pointer to the buffer where the CAN frame is copied
00200 *
00201 * @notapi
00202 */
void can_lld_receive(CANDriver *canp,
canmbx_t mailbox,
CANRxFrame *crfp) { (void)canp;
(void)mailbox;
(void)crfp; } #if CAN_USE_SLEEP_MODE || defined(__DOXYGEN__)
/**
00215 * @brief Enters the sleep mode.
00216 *
00217 * @param[in] canp pointer to the @p CANDriver object
00218 *
00219 * @notapi
00220 */
void can_lld_sleep(CANDriver *canp) { (void)canp; } /**
00228 * @brief Enforces leaving the sleep mode.
00229 *
00230 * @param[in] canp pointer to the @p CANDriver object
00231 *
00232 * @notapi
00233 */
void can_lld_wakeup(CANDriver *canp) { (void)canp; }
#endif /* CAN_USE_SLEEP_MODE */ #endif /* HAL_USE_CAN */ /** @} */
/*
00002 ChibiOS/RT - Copyright (C) 2006,2007,2008,2009,2010,
00003 2011,2012,2013 Giovanni Di Sirio.
00004
00005 This file is part of ChibiOS/RT.
00006
00007 ChibiOS/RT is free software; you can redistribute it and/or modify
00008 it under the terms of the GNU General Public License as published by
00009 the Free Software Foundation; either version 3 of the License, or
00010 (at your option) any later version.
00011
00012 ChibiOS/RT is distributed in the hope that it will be useful,
00013 but WITHOUT ANY WARRANTY; without even the implied warranty of
00014 MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
00015 GNU General Public License for more details.
00016
00017 You should have received a copy of the GNU General Public License
00018 along with this program. If not, see <http://www.gnu.org/licenses/>.
00019
00020 ---
00021
00022 A special exception to the GPL can be applied should you wish to distribute
00023 a combined work that includes ChibiOS/RT, without being obliged to provide
00024 the source code for any proprietary components. See the file exception.txt
00025 for full details of how and when the exception can be applied.
00026 */ /**
00029 * @file can.h
00030 * @brief CAN Driver macros and structures.
00031 *
00032 * @addtogroup CAN
00033 * @{
00034 */ #ifndef _CAN_H_
#define _CAN_H_ #if HAL_USE_CAN || defined(__DOXYGEN__) /*===========================================================================*/
/* Driver constants. */
/*===========================================================================*/ /**
00046 * @name CAN status flags
00047 * @{
00048 */
/**
00050 * @brief Errors rate warning.
00051 */
#define CAN_LIMIT_WARNING 1
/**
00054 * @brief Errors rate error.
00055 */
#define CAN_LIMIT_ERROR 2
/**
00058 * @brief Bus off condition reached.
00059 */
#define CAN_BUS_OFF_ERROR 4
/**
00062 * @brief Framing error of some kind on the CAN bus.
00063 */
#define CAN_FRAMING_ERROR 8
/**
00066 * @brief Overflow in receive queue.
00067 */
#define CAN_OVERFLOW_ERROR 16
/** @} */ /**
00072 * @brief Special mailbox identifier.
00073 */
#define CAN_ANY_MAILBOX 0 /*===========================================================================*/
/* Driver pre-compile time settings. */
/*===========================================================================*/ /**
00081 * @name CAN configuration options
00082 * @{
00083 */
/**
00085 * @brief Sleep mode related APIs inclusion switch.
00086 * @details This option can only be enabled if the CAN implementation supports
00087 * the sleep mode, see the macro @p CAN_SUPPORTS_SLEEP exported by
00088 * the underlying implementation.
00089 */
#if !defined(CAN_USE_SLEEP_MODE) || defined(__DOXYGEN__)
#define CAN_USE_SLEEP_MODE TRUE
#endif
/** @} */ /*===========================================================================*/
/* Derived constants and error checks. */
/*===========================================================================*/ #if !CH_USE_SEMAPHORES || !CH_USE_EVENTS
#error "CAN driver requires CH_USE_SEMAPHORES and CH_USE_EVENTS"
#endif /*===========================================================================*/
/* Driver data structures and types. */
/*===========================================================================*/ /**
00108 * @brief Driver state machine possible states.
00109 */
typedef enum {
CAN_UNINIT = , /**< Not initialized. */
CAN_STOP = , /**< Stopped. */
CAN_STARTING = , /**< Starting. */
CAN_READY = , /**< Ready. */
CAN_SLEEP = /**< Sleep state. */
} canstate_t; #include "can_lld.h" /*===========================================================================*/
/* Driver macros. */
/*===========================================================================*/ /**
00125 * @name Macro Functions
00126 * @{
00127 */
/**
00129 * @brief Converts a mailbox index to a bit mask.
00130 */
#define CAN_MAILBOX_TO_MASK(mbx) (1 << ((mbx) - 1))
/** @} */ /*===========================================================================*/
/* External declarations. */
/*===========================================================================*/ #ifdef __cplusplus
extern "C" {
#endif
void canInit(void);
void canObjectInit(CANDriver *canp);
void canStart(CANDriver *canp, const CANConfig *config);
void canStop(CANDriver *canp);
msg_t canTransmit(CANDriver *canp,
canmbx_t mailbox,
const CANTxFrame *ctfp,
systime_t timeout);
msg_t canReceive(CANDriver *canp,
canmbx_t mailbox,
CANRxFrame *crfp,
systime_t timeout);
#if CAN_USE_SLEEP_MODE
void canSleep(CANDriver *canp);
void canWakeup(CANDriver *canp);
#endif /* CAN_USE_SLEEP_MODE */
#ifdef __cplusplus
}
#endif #endif /* HAL_USE_CAN */ #endif /* _CAN_H_ */ /** @} */
/*
00002 ChibiOS/RT - Copyright (C) 2006,2007,2008,2009,2010,
00003 2011,2012,2013 Giovanni Di Sirio.
00004
00005 This file is part of ChibiOS/RT.
00006
00007 ChibiOS/RT is free software; you can redistribute it and/or modify
00008 it under the terms of the GNU General Public License as published by
00009 the Free Software Foundation; either version 3 of the License, or
00010 (at your option) any later version.
00011
00012 ChibiOS/RT is distributed in the hope that it will be useful,
00013 but WITHOUT ANY WARRANTY; without even the implied warranty of
00014 MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
00015 GNU General Public License for more details.
00016
00017 You should have received a copy of the GNU General Public License
00018 along with this program. If not, see <http://www.gnu.org/licenses/>.
00019
00020 ---
00021
00022 A special exception to the GPL can be applied should you wish to distribute
00023 a combined work that includes ChibiOS/RT, without being obliged to provide
00024 the source code for any proprietary components. See the file exception.txt
00025 for full details of how and when the exception can be applied.
00026 */ /**
00029 * @file can.c
00030 * @brief CAN Driver code.
00031 *
00032 * @addtogroup CAN
00033 * @{
00034 */ #include "ch.h"
#include "hal.h" #if HAL_USE_CAN || defined(__DOXYGEN__) /*===========================================================================*/
/* Driver local definitions. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver exported variables. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver local variables and types. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver local functions. */
/*===========================================================================*/ /*===========================================================================*/
/* Driver exported functions. */
/*===========================================================================*/ /**
00062 * @brief CAN Driver initialization.
00063 * @note This function is implicitly invoked by @p halInit(), there is
00064 * no need to explicitly initialize the driver.
00065 *
00066 * @init
00067 */
void canInit(void) { can_lld_init();
} /**
00074 * @brief Initializes the standard part of a @p CANDriver structure.
00075 *
00076 * @param[out] canp pointer to the @p CANDriver object
00077 *
00078 * @init
00079 */
void canObjectInit(CANDriver *canp) { canp->state = CAN_STOP;
canp->config = NULL;
chSemInit(&canp->txsem, );
chSemInit(&canp->rxsem, );
chEvtInit(&canp->rxfull_event);
chEvtInit(&canp->txempty_event);
chEvtInit(&canp->error_event);
#if CAN_USE_SLEEP_MODE
chEvtInit(&canp->sleep_event);
chEvtInit(&canp->wakeup_event);
#endif /* CAN_USE_SLEEP_MODE */
} /**
00096 * @brief Configures and activates the CAN peripheral.
00097 * @note Activating the CAN bus can be a slow operation this this function
00098 * is not atomic, it waits internally for the initialization to
00099 * complete.
00100 *
00101 * @param[in] canp pointer to the @p CANDriver object
00102 * @param[in] config pointer to the @p CANConfig object. Depending on
00103 * the implementation the value can be @p NULL.
00104 *
00105 * @api
00106 */
void canStart(CANDriver *canp, const CANConfig *config) { chDbgCheck(canp != NULL, "canStart"); chSysLock();
chDbgAssert((canp->state == CAN_STOP) ||
(canp->state == CAN_STARTING) ||
(canp->state == CAN_READY),
"canStart(), #1", "invalid state");
while (canp->state == CAN_STARTING)
chThdSleepS();
if (canp->state == CAN_STOP) {
canp->config = config;
can_lld_start(canp);
canp->state = CAN_READY;
}
chSysUnlock();
} /**
00127 * @brief Deactivates the CAN peripheral.
00128 *
00129 * @param[in] canp pointer to the @p CANDriver object
00130 *
00131 * @api
00132 */
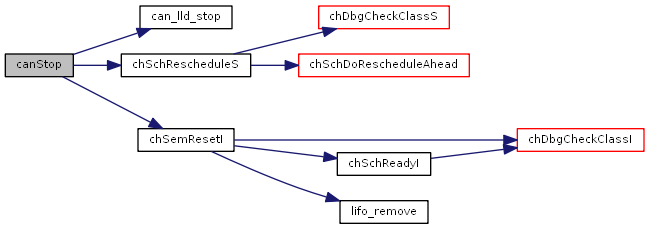
void canStop(CANDriver *canp) { chDbgCheck(canp != NULL, "canStop"); chSysLock();
chDbgAssert((canp->state == CAN_STOP) || (canp->state == CAN_READY),
"canStop(), #1", "invalid state");
can_lld_stop(canp);
canp->state = CAN_STOP;
chSemResetI(&canp->rxsem, );
chSemResetI(&canp->txsem, );
chSchRescheduleS();
chSysUnlock();
} /**
00149 * @brief Can frame transmission.
00150 * @details The specified frame is queued for transmission, if the hardware
00151 * queue is full then the invoking thread is queued.
00152 * @note Trying to transmit while in sleep mode simply enqueues the thread.
00153 *
00154 * @param[in] canp pointer to the @p CANDriver object
00155 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00156 * @param[in] ctfp pointer to the CAN frame to be transmitted
00157 * @param[in] timeout the number of ticks before the operation timeouts,
00158 * the following special values are allowed:
00159 * - @a TIME_IMMEDIATE immediate timeout.
00160 * - @a TIME_INFINITE no timeout.
00161 * .
00162 * @return The operation result.
00163 * @retval RDY_OK the frame has been queued for transmission.
00164 * @retval RDY_TIMEOUT The operation has timed out.
00165 * @retval RDY_RESET The driver has been stopped while waiting.
00166 *
00167 * @api
00168 */
msg_t canTransmit(CANDriver *canp,
canmbx_t mailbox,
const CANTxFrame *ctfp,
systime_t timeout) { chDbgCheck((canp != NULL) && (ctfp != NULL) && (mailbox <= CAN_TX_MAILBOXES),
"canTransmit"); chSysLock();
chDbgAssert((canp->state == CAN_READY) || (canp->state == CAN_SLEEP),
"canTransmit(), #1", "invalid state");
while ((canp->state == CAN_SLEEP) || !can_lld_is_tx_empty(canp, mailbox)) {
msg_t msg = chSemWaitTimeoutS(&canp->txsem, timeout);
if (msg != RDY_OK) {
chSysUnlock();
return msg;
}
}
can_lld_transmit(canp, mailbox, ctfp);
chSysUnlock();
return RDY_OK;
} /**
00193 * @brief Can frame receive.
00194 * @details The function waits until a frame is received.
00195 * @note Trying to receive while in sleep mode simply enqueues the thread.
00196 *
00197 * @param[in] canp pointer to the @p CANDriver object
00198 * @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
00199 * @param[out] crfp pointer to the buffer where the CAN frame is copied
00200 * @param[in] timeout the number of ticks before the operation timeouts,
00201 * the following special values are allowed:
00202 * - @a TIME_IMMEDIATE immediate timeout (useful in an
00203 * event driven scenario where a thread never blocks
00204 * for I/O).
00205 * - @a TIME_INFINITE no timeout.
00206 * .
00207 * @return The operation result.
00208 * @retval RDY_OK a frame has been received and placed in the buffer.
00209 * @retval RDY_TIMEOUT The operation has timed out.
00210 * @retval RDY_RESET The driver has been stopped while waiting.
00211 *
00212 * @api
00213 */
msg_t canReceive(CANDriver *canp,
canmbx_t mailbox,
CANRxFrame *crfp,
systime_t timeout) { chDbgCheck((canp != NULL) && (crfp != NULL) && (mailbox <= CAN_RX_MAILBOXES),
"canReceive"); chSysLock();
chDbgAssert((canp->state == CAN_READY) || (canp->state == CAN_SLEEP),
"canReceive(), #1", "invalid state");
while ((canp->state == CAN_SLEEP) || !can_lld_is_rx_nonempty(canp, mailbox)) {
msg_t msg = chSemWaitTimeoutS(&canp->rxsem, timeout);
if (msg != RDY_OK) {
chSysUnlock();
return msg;
}
}
can_lld_receive(canp, mailbox, crfp);
chSysUnlock();
return RDY_OK;
} #if CAN_USE_SLEEP_MODE || defined(__DOXYGEN__)
/**
00239 * @brief Enters the sleep mode.
00240 * @details This function puts the CAN driver in sleep mode and broadcasts
00241 * the @p sleep_event event source.
00242 * @pre In order to use this function the option @p CAN_USE_SLEEP_MODE must
00243 * be enabled and the @p CAN_SUPPORTS_SLEEP mode must be supported
00244 * by the low level driver.
00245 *
00246 * @param[in] canp pointer to the @p CANDriver object
00247 *
00248 * @api
00249 */
void canSleep(CANDriver *canp) { chDbgCheck(canp != NULL, "canSleep"); chSysLock();
chDbgAssert((canp->state == CAN_READY) || (canp->state == CAN_SLEEP),
"canSleep(), #1", "invalid state");
if (canp->state == CAN_READY) {
can_lld_sleep(canp);
canp->state = CAN_SLEEP;
chEvtBroadcastI(&canp->sleep_event);
chSchRescheduleS();
}
chSysUnlock();
} /**
00267 * @brief Enforces leaving the sleep mode.
00268 * @note The sleep mode is supposed to be usually exited automatically by
00269 * an hardware event.
00270 *
00271 * @param[in] canp pointer to the @p CANDriver object
00272 */
void canWakeup(CANDriver *canp) { chDbgCheck(canp != NULL, "canWakeup"); chSysLock();
chDbgAssert((canp->state == CAN_READY) || (canp->state == CAN_SLEEP),
"canWakeup(), #1", "invalid state");
if (canp->state == CAN_SLEEP) {
can_lld_wakeup(canp);
canp->state = CAN_READY;
chEvtBroadcastI(&canp->wakeup_event);
chSchRescheduleS();
}
chSysUnlock();
}
#endif /* CAN_USE_SLEEP_MODE */ #endif /* HAL_USE_CAN */ /** @} */
void canInit(void )
CAN Driver initialization.
- Note:
- This function is implicitly invoked by
halInit(), there is no need to explicitly initialize the driver.
- Function Class:
- Initializer, this function just initializes an object and can be invoked before the kernel is initialized.
Here is the call graph for this function:

void canObjectInit ( CANDriver * canp )
Initializes the standard part of a CANDriver structure.
- Function Class:
- Initializer, this function just initializes an object and can be invoked before the kernel is initialized.

Configures and activates the CAN peripheral.
- Note:
- Activating the CAN bus can be a slow operation this this function is not atomic, it waits internally for the initialization to complete.
Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.

void canStop ( CANDriver * canp )
Deactivates the CAN peripheral.
Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
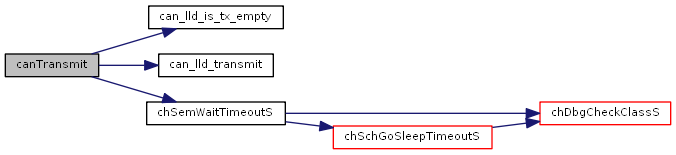
msg_t canTransmit ( CANDriver * canp, canmbx_t mailbox, const CANTxFrame * ctfp, systime_t timeout )
Can frame transmission.
The specified frame is queued for transmission, if the hardware queue is full then the invoking thread is queued.
- Note:
- Trying to transmit while in sleep mode simply enqueues the thread.
Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
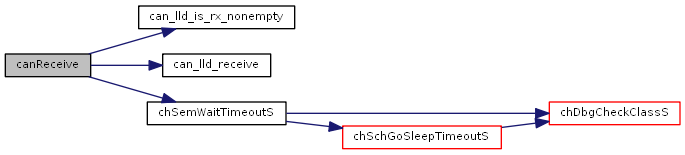
msg_t canReceive ( CANDriver * canp, canmbx_t mailbox, CANRxFrame * crfp, systime_t timeout )
Can frame receive.
The function waits until a frame is received.
- Note:
- Trying to receive while in sleep mode simply enqueues the thread.
Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
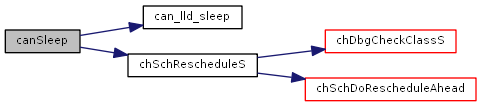
void canSleep ( CANDriver * canp )
Enters the sleep mode.
This function puts the CAN driver in sleep mode and broadcasts the sleep_event event source.
- Precondition:
- In order to use this function the option
CAN_USE_SLEEP_MODEmust be enabled - and the
CAN_SUPPORTS_SLEEPmode must be supported by the low level driver.
Function Class:Normal API, this function can be invoked by regular system threads but not from within a lock zone.
void canWakeup ( CANDriver * canp )
Enforces leaving the sleep mode.
- Note:
- The sleep mode is supposed to be usually exited automatically by an hardware event.

/**
* This switch defines whether the driver implementation supports
* a low power switch mode with automatic an wakeup feature.
*/
#define CAN_SUPPORTS_SLEEP TRUE /**
* This implementation supports three transmit mailboxes.
*/
#define CAN_TX_MAILBOXES 3 /**
* This implementation supports two receive mailboxes.
*/
#define CAN_RX_MAILBOXES 2 /*===========================================================================*/
/* Driver pre-compile time settings. */
/*===========================================================================*/ /**
* @name Configuration options
* @{
*/
/**
* CAN1 driver enable switch.
* @details If set to @p TRUE the support for CAN1 is included.
*/
#if !defined(PLATFORM_CAN_USE_CAN1) || defined(__DOXYGEN__)
#define PLATFORM_CAN_USE_CAN1 FALSE
#endif /*===========================================================================*/
/* Derived constants and error checks. */
/*===========================================================================*/ #if CAN_USE_SLEEP_MODE && !CAN_SUPPORTS_SLEEP
#error "CAN sleep mode not supported in this architecture"
#endif /*===========================================================================*/
/* Driver data structures and types. */
/*===========================================================================*/ /**
* Type of a transmission mailbox index.
*/
typedef uint32_t canmbx_t; /**
* CAN transmission frame.
* @note Accessing the frame data as word16 or word32 is not portable because
* machine data endianness, it can be still useful for a quick filling.
*/
typedef struct
{
struct
{
uint8_t DLC :; /**< @brief Data length. */
uint8_t RTR :; /**< @brief Frame type. */
uint8_t IDE :; /**< @brief Identifier type. */
};
union
{
struct
{
uint32_t SID :; /**< @brief Standard identifier.*/
};
struct
{
uint32_t EID :; /**< @brief Extended identifier.*/
};
};
union
{
uint8_t data8[ ]; /**< @brief Frame data. */
uint16_t data16[ ]; /**< @brief Frame data. */
uint32_t data32[ ]; /**< @brief Frame data. */
};
} CANTxFrame; /**
* CAN received frame.
* @note Accessing the frame data as word16 or word32 is not portable because
* machine data endianness, it can be still useful for a quick filling.
*/
typedef struct
{
struct
{
uint8_t DLC :; /**< @brief Data length. */
uint8_t RTR :; /**< @brief Frame type. */
uint8_t IDE :; /**< @brief Identifier type. */
};
union
{
struct
{
uint32_t SID :; /**< @brief Standard identifier.*/
};
struct
{
uint32_t EID :; /**< @brief Extended identifier.*/
};
};
union
{
uint8_t data8[ ]; /**< @brief Frame data. */
uint16_t data16[ ]; /**< @brief Frame data. */
uint32_t data32[ ]; /**< @brief Frame data. */
};
} CANRxFrame; /**
* CAN filter.
* @note Implementations may extend this structure to contain more,
* architecture dependent, fields.
* @note It could not be present on some architectures.
*/
typedef struct
{
uint32_t dummy;
} CANFilter; /**
* Driver configuration structure.
* @note Implementations may extend this structure to contain more,
* architecture dependent, fields.
* @note It could be empty on some architectures.
*/
typedef struct
{
uint32_t dummy;
} CANConfig; /**
* Structure representing an CAN driver.
*/
typedef struct
{
/**
* Driver state.
*/
canstate_t state;
/**
* Current configuration data.
*/
const CANConfig *config;
/**
* Transmission queue semaphore.
*/
Semaphore txsem;
/**
* Receive queue semaphore.
*/
Semaphore rxsem;
/**
* One or more frames become available.
* @note After broadcasting this event it will not be broadcasted again
* until the received frames queue has been completely emptied. It
* is <b>not</b> broadcasted for each received frame. It is
* responsibility of the application to empty the queue by
* repeatedly invoking @p chReceive() when listening to this event.
* This behavior minimizes the interrupt served by the system
* because CAN traffic.
* @note The flags associated to the listeners will indicate which
* receive mailboxes become non-empty.
*/
EventSource rxfull_event;
/**
* One or more transmission mailbox become available.
* @note The flags associated to the listeners will indicate which
* transmit mailboxes become empty.
*
*/
EventSource txempty_event;
/**
* A CAN bus error happened.
* @note The flags associated to the listeners will indicate the
* error(s) that have occurred.
*/
EventSource error_event;
/**
* Entering sleep state event.
*/
EventSource sleep_event;
/**
* Exiting sleep state event.
*/
EventSource wakeup_event;
/* End of the mandatory fields.*/
} CANDriver; extern CANDriver CAND1;
void can_lld_init( void );
void can_lld_start( CANDriver *canp );
void can_lld_stop( CANDriver *canp );
uiknt32_t can_lld_is_tx_empty( CANDriver *canp, canmbx_t mailbox );
void can_lld_transmit( CANDriver *canp, canmbx_t mailbox,
const CANTxFrame *crfp );
uiknt32_t can_lld_is_rx_nonempty( CANDriver *canp, canmbx_t mailbox );
void can_lld_receive( CANDriver *canp, canmbx_t mailbox, CANRxFrame *ctfp );
void can_lld_sleep( CANDriver *canp );
void can_lld_wakeup( CANDriver *canp ); /**
* @file templates/can_lld.c
* CAN Driver subsystem low level driver source template.
*
* @addtogroup CAN
* @{
*/ /**
* CAN1 driver identifier.
*/
CANDriver CAND1; /**
* Low level CAN driver initialization.
*
* @notapi
*/
void can_lld_init( void )
{
/* Driver initialization.*/
canObjectInit( &CAND1 );
} /**
* Configures and activates the CAN peripheral.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @notapi
*/
void can_lld_start( CANDriver *canp )
{
if ( canp->state == CAN_STOP )
{
/* Enables the peripheral.*/
if ( &CAND1 == canp )
{
}
}
/* Configures the peripheral.*/ } /**
* Deactivates the CAN peripheral.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @notapi
*/
void can_lld_stop( CANDriver *canp )
{
if ( canp->state == CAN_READY )
{
/* Resets the peripheral.*/
/* Disables the peripheral.*/
if ( &CAND1 == canp )
{
}
}
} /**
* Determines whether a frame can be transmitted.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
*
* @return The queue space availability.
* @retval FALSE no space in the transmit queue.
* @retval TRUE transmit slot available.
*
* @notapi
*/
uiknt32_t can_lld_is_tx_empty( CANDriver *canp, canmbx_t mailbox )
{
(void) canp;
switch ( mailbox )
{
case CAN_ANY_MAILBOX:
return FALSE;
case :
return FALSE;
case :
return FALSE;
case :
return FALSE;
default:
return FALSE;
}
} /**
* Inserts a frame into the transmit queue.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] ctfp pointer to the CAN frame to be transmitted
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
*
* @notapi
*/
void can_lld_transmit( CANDriver *canp, canmbx_t mailbox,
const CANTxFrame *ctfp )
{
(void) canp;
(void) mailbox;
(void) ctfp; } /**
* Determines whether a frame has been received.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
*
* @return The queue space availability.
* @retval FALSE no space in the transmit queue.
* @retval TRUE transmit slot available.
*
* @notapi
*/
uiknt32_t can_lld_is_rx_nonempty( CANDriver *canp, canmbx_t mailbox )
{
(void) canp;
(void) mailbox; switch ( mailbox )
{
case CAN_ANY_MAILBOX:
return FALSE;
case :
return FALSE;
case :
return FALSE;
default:
return FALSE;
}
} /**
* Receives a frame from the input queue.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
* @param[out] crfp pointer to the buffer where the CAN frame is copied
*
* @notapi
*/
void can_lld_receive( CANDriver *canp, canmbx_t mailbox, CANRxFrame *crfp )
{
(void) canp;
(void) mailbox;
(void) crfp;
} /**
* Enters the sleep mode.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @notapi
*/
void can_lld_sleep( CANDriver *canp )
{
(void) canp;
} /**
* Enforces leaving the sleep mode.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @notapi
*/
void can_lld_wakeup( CANDriver *canp )
{
(void) canp; } /**
* @name CAN status flags
* @{
*/
/**
* Errors rate warning.
*/
#define CAN_LIMIT_WARNING 1
/**
* Errors rate error.
*/
#define CAN_LIMIT_ERROR 2
/**
* Bus off condition reached.
*/
#define CAN_BUS_OFF_ERROR 4
/**
* Framing error of some kind on the CAN bus.
*/
#define CAN_FRAMING_ERROR 8
/**
* Overflow in receive queue.
*/
#define CAN_OVERFLOW_ERROR 16 /**
* Special mailbox identifier.
*/
#define CAN_ANY_MAILBOX 0 /**
* @name CAN configuration options
* @{
*/
/**
* Sleep mode related APIs inclusion switch.
* @details This option can only be enabled if the CAN implementation supports
* the sleep mode, see the macro @p CAN_SUPPORTS_SLEEP exported by
* the underlying implementation.
*/ #define CAN_USE_SLEEP_MODE TRUE /**
* Driver state machine possible states.
*/
typedef enum
{
CAN_UNINIT = , /**< Not initialized. */
CAN_STOP = , /**< Stopped. */
CAN_STARTING = , /**< Starting. */
CAN_READY = , /**< Ready. */
CAN_SLEEP = /**< Sleep state. */
} canstate_t; #include "can_lld.h" /**
* Converts a mailbox index to a bit mask.
*/
#define CAN_MAILBOX_TO_MASK(mbx) (1 << ((mbx) - 1)) void canInit( void );
void canObjectInit( CANDriver *canp );
void canStart( CANDriver *canp, const CANConfig *config );
void canStop( CANDriver *canp );
msg_t canTransmit( CANDriver *canp, canmbx_t mailbox, const CANTxFrame *ctfp,
systime_t timeout );
msg_t canReceive( CANDriver *canp, canmbx_t mailbox, CANRxFrame *crfp,
systime_t timeout );
void canSleep( CANDriver *canp );
void canWakeup( CANDriver *canp ); #include "ch.h"
#include "hal.h" /**
* CAN Driver initialization.
* @note This function is implicitly invoked by @p halInit(), there is
* no need to explicitly initialize the driver.
*
* @init
*/
void canInit( void )
{ can_lld_init( );
} /**
* Initializes the standard part of a @p CANDriver structure.
*
* @param[out] canp pointer to the @p CANDriver object
*
* @init
*/
void canObjectInit( CANDriver *canp )
{ canp->state = CAN_STOP;
canp->config = NULL;
chSemInit( &canp->txsem, );
chSemInit( &canp->rxsem, );
chEvtInit( &canp->rxfull_event );
chEvtInit( &canp->txempty_event );
chEvtInit( &canp->error_event );
chEvtInit( &canp->sleep_event );
chEvtInit( &canp->wakeup_event );
} /**
* Configures and activates the CAN peripheral.
* @note Activating the CAN bus can be a slow operation this this function
* is not atomic, it waits internally for the initialization to
* complete.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] config pointer to the @p CANConfig object. Depending on
* the implementation the value can be @p NULL.
*
* @api
*/
void canStart( CANDriver *canp, const CANConfig *config )
{ chDbgCheck( canp != NULL, "canStart" ); chSysLock( );
chDbgAssert(
( canp->state == CAN_STOP ) || ( canp->state == CAN_STARTING )
|| ( canp->state == CAN_READY ), "canStart(), #1", "invalid state" );
while ( canp->state == CAN_STARTING )
chThdSleepS( );
if ( canp->state == CAN_STOP )
{
canp->config = config;
can_lld_start( canp );
canp->state = CAN_READY;
}
chSysUnlock( );
} /**
* Deactivates the CAN peripheral.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @api
*/
void canStop( CANDriver *canp )
{ chDbgCheck( canp != NULL, "canStop" ); chSysLock( );
chDbgAssert( ( canp->state == CAN_STOP ) || ( canp->state == CAN_READY ),
"canStop(), #1", "invalid state" );
can_lld_stop( canp );
canp->state = CAN_STOP;
chSemResetI( &canp->rxsem, );
chSemResetI( &canp->txsem, );
chSchRescheduleS( );
chSysUnlock( );
} /**
* Can frame transmission.
* @details The specified frame is queued for transmission, if the hardware
* queue is full then the invoking thread is queued.
* @note Trying to transmit while in sleep mode simply enqueues the thread.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
* @param[in] ctfp pointer to the CAN frame to be transmitted
* @param[in] timeout the number of ticks before the operation timeouts,
* the following special values are allowed:
* - @a TIME_IMMEDIATE immediate timeout.
* - @a TIME_INFINITE no timeout.
* .
* @return The operation result.
* @retval RDY_OK the frame has been queued for transmission.
* @retval RDY_TIMEOUT The operation has timed out.
* @retval RDY_RESET The driver has been stopped while waiting.
*
* @api
*/
msg_t canTransmit( CANDriver *canp, canmbx_t mailbox, const CANTxFrame *ctfp,
systime_t timeout )
{ chDbgCheck(
( canp != NULL ) && ( ctfp != NULL ) && ( mailbox <= CAN_TX_MAILBOXES ),
"canTransmit" ); chSysLock( );
chDbgAssert( ( canp->state == CAN_READY ) || ( canp->state == CAN_SLEEP ),
"canTransmit(), #1", "invalid state" );
while ( ( canp->state == CAN_SLEEP ) || !can_lld_is_tx_empty( canp, mailbox ) )
{
msg_t msg = chSemWaitTimeoutS( &canp->txsem, timeout );
if ( msg != RDY_OK )
{
chSysUnlock( );
return msg;
}
}
can_lld_transmit( canp, mailbox, ctfp );
chSysUnlock( );
return RDY_OK;
} /**
* Can frame receive.
* @details The function waits until a frame is received.
* @note Trying to receive while in sleep mode simply enqueues the thread.
*
* @param[in] canp pointer to the @p CANDriver object
* @param[in] mailbox mailbox number, @p CAN_ANY_MAILBOX for any mailbox
* @param[out] crfp pointer to the buffer where the CAN frame is copied
* @param[in] timeout the number of ticks before the operation timeouts,
* the following special values are allowed:
* - @a TIME_IMMEDIATE immediate timeout (useful in an
* event driven scenario where a thread never blocks
* for I/O).
* - @a TIME_INFINITE no timeout.
* .
* @return The operation result.
* @retval RDY_OK a frame has been received and placed in the buffer.
* @retval RDY_TIMEOUT The operation has timed out.
* @retval RDY_RESET The driver has been stopped while waiting.
*
* @api
*/
msg_t canReceive( CANDriver *canp, canmbx_t mailbox, CANRxFrame *crfp,
systime_t timeout )
{ chDbgCheck(
( canp != NULL ) && ( crfp != NULL ) && ( mailbox <= CAN_RX_MAILBOXES ),
"canReceive" ); chSysLock( );
chDbgAssert( ( canp->state == CAN_READY ) || ( canp->state == CAN_SLEEP ),
"canReceive(), #1", "invalid state" );
while ( ( canp->state == CAN_SLEEP )
|| !can_lld_is_rx_nonempty( canp, mailbox ) )
{
msg_t msg = chSemWaitTimeoutS( &canp->rxsem, timeout );
if ( msg != RDY_OK )
{
chSysUnlock( );
return msg;
}
}
can_lld_receive( canp, mailbox, crfp );
chSysUnlock( );
return RDY_OK;
} /**
* Enters the sleep mode.
* @details This function puts the CAN driver in sleep mode and broadcasts
* the @p sleep_event event source.
* @pre In order to use this function the option @p CAN_USE_SLEEP_MODE must
* be enabled and the @p CAN_SUPPORTS_SLEEP mode must be supported
* by the low level driver.
*
* @param[in] canp pointer to the @p CANDriver object
*
* @api
*/
void canSleep( CANDriver *canp )
{ chDbgCheck( canp != NULL, "canSleep" ); chSysLock( );
chDbgAssert( ( canp->state == CAN_READY ) || ( canp->state == CAN_SLEEP ),
"canSleep(), #1", "invalid state" );
if ( canp->state == CAN_READY )
{
can_lld_sleep( canp );
canp->state = CAN_SLEEP;
chEvtBroadcastI( &canp->sleep_event );
chSchRescheduleS( );
}
chSysUnlock( );
} /**
* Enforces leaving the sleep mode.
* @note The sleep mode is supposed to be usually exited automatically by
* an hardware event.
*
* @param[in] canp pointer to the @p CANDriver object
*/
void canWakeup( CANDriver *canp )
{ chDbgCheck( canp != NULL, "canWakeup" ); chSysLock( );
chDbgAssert( ( canp->state == CAN_READY ) || ( canp->state == CAN_SLEEP ),
"canWakeup(), #1", "invalid state" );
if ( canp->state == CAN_SLEEP )
{
can_lld_wakeup( canp );
canp->state = CAN_READY;
chEvtBroadcastI( &canp->wakeup_event );
chSchRescheduleS( );
}
chSysUnlock( );
}
ChibiOS/RT 2.6.9 CAN Driver的更多相关文章
- ChibiOS/RT 2.6.9 CAN Low Level Driver for STM32
/* ChibiOS - Copyright (C) 2006..2015 Giovanni Di Sirio Licensed under the Apache License, Version 2 ...
- ChibiOS/RT移植到STM32F407
官网地址:http://www.chibios.org/dokuwiki/doku.php 下载源码 找到STM32F407的demos程序(chibios\demos\STM32\RT-STM32F ...
- OpenOCD 0.9.0 release
OpenOCD 0.9.0 release May 18th, 2015 I’m happy to announce the release of OpenOCD version 0.9.0, fin ...
- Open Source RTOS
http://www.osrtos.com/ Name License Platforms Description Last updated FreeRTOS Modified GPL MSP ...
- ARM architecture
http://en.wikipedia.org/wiki/ARM_architecture ARM architecture ARM architectures The ARM logo De ...
- zubax_gnss移植到STM32F407
源码下载:https://github.com/Zubax/zubax_gnss.git 源码默认支持STM32F107芯片 STM32 HAL库测试:zubax_gnss\bootloader\zu ...
- 深入linux kernel内核配置选项
============================================================================== 深入linux kernel内核配置选项 ...
- Linux Device Driver && Device File
catalog . 设备驱动程序简介 . I/O体系结构 . 访问设备 . 与文件系统关联 . 字符设备操作 . 块设备操作 . 资源分配 . 总线系统 1. 设备驱动程序简介 设备驱动程序是内核的关 ...
- spark任务运行完成后在driver端的处理逻辑
回顾 上一篇,我们分析了了任务在executor端的运行流程,任务运行结束后,在Executor.launchTask方法最后,通过调用execBackend.statusUpdate方法将任务结果以 ...
随机推荐
- 【译】使用OpenVAS 9进行漏洞扫描
本文译自Vulnerability Scanning with OpenVAS 9 part 1: Installation & Setup系列,本文将融合目前已经发表的四个部分. Part ...
- lrc歌词文件格式
一.lrc文件有什么作用 lrc文件就是一个文本文件,用来记录歌曲的歌词信息,使得播放歌曲时能够让歌词与声音同步显示,类似于电影字幕那种效果. 心情很丧时我们会听首歌陶冶一下情操,不知你是否注意过音乐 ...
- C++单链表反转
单链表反转笔记: #include<iostream> #include<string.h> using namespace std; struct ListNode { in ...
- 【ARTS】01_07_左耳听风-20181224~1230
ARTS: Algrothm: leetcode算法题目 Review: 阅读并且点评一篇英文技术文章 Tip/Techni: 学习一个技术技巧 Share: 分享一篇有观点和思考的技术文章 Algo ...
- 【CTF WEB】反序列化
反序列化 漏洞代码 <?php error_reporting(0); if(empty($_GET['code'])) die(show_source(__FILE__)); class ex ...
- VELT-0.1.5开发:使用kgdb调试Linux内核【转】
转自:http://demo.netfoucs.com/lights_joy/article/details/44106589 VELT的全称是Visual EmbedLinuxTools,它是一个与 ...
- 查看mysql 库信息和表结构与表创建方法
一.查看基础信息 1.查看数据库存储位置 show global variables like "%datadir%"; 2.查看数据库的版本 select version(); ...
- LeetCode(13):罗马数字转整数
Easy! 题目描述: 罗马数字包含以下七种字符:I, V, X, L,C,D 和 M. 字符 数值 I 1 V 5 X 10 L 50 C 100 D 500 M 1000 例如, 罗马数字 2 写 ...
- Smashing The Browser:From Vulnerability Discovery To Exploit学习记录
浏览器Fuzz技术 漏洞挖掘 白盒挖掘 代码审计 自动化代码分析 黑盒挖掘 Fuzzing 两种Fuzzing技术 静态Fuzzing 基于变异的 文件.文档 多媒体 bf3 基于生成的 浏览器 重点 ...
- DSP 程序的执行时间
在访问TSCL寄存器前要定义 cregister volatile unsigned int TSCL; TSCL/TSCH,它们与CPU同频,共同表示一个64-bit数,CPU运行一个cycle,该 ...