Diffusion系列 - DDPM 公式推导 + 代码 -(二)
Denoising Diffusion Probabilistic Model(DDPM)原理

1. 生成模型对比
记 真实图片为 \(x_0\),噪声图片为 \(x_t\),噪声变量 \(z\sim \mathcal{N}(\mu,\sigma^2)\),噪声变量 \(\varepsilon \sim \mathcal{N}(0,I)\),编码过程 \(q\),解码过程 \(p\)。
GAN网络
\]
VAE网络
\]
Diffusion网络
加噪编码:
\]
去噪解码:
\]
DDPM加噪过程分成了 t 步,每次只加入少量噪声,同样的去噪过程也分为t步,使得模型更容易学习,生成效果更稳定。
2. 原理解析
2.1 加噪过程
\]
此过程中,时刻t时图片 \(x_t\) 只依赖于上一时刻图片 \(x_{t-1}\),故 将整个加噪过程建模成马尔可夫过程,则有
\]
对于单个加噪过程,希望每次加入的噪声比较小,时间相邻的图片差异不要太大。
设加入噪声\(\sqrt{\beta_t}\varepsilon_t \sim \mathcal{N}(0,\beta_tI),\quad \varepsilon_t \sim \mathcal{N}(0,I), \beta_t \to 0^+\) :
\]
由 \(x_t=\mu_t + \sigma_t \varepsilon\) (重参数化)可知,\(x_t\) 的均值为 \(k_t x_{t-1}\),方差为 \(\beta_t\) ,
其PDF定义为:
\]
把 \(x_t\) 展开:
= k_t (k_{t-1} x_{t-2}+\sqrt{\beta_{t-1}}\varepsilon_{t-1})+\sqrt{\beta_t}\varepsilon_t \\
= k_t k_{t-1} x_{t-2} + (k_t\sqrt{\beta_{t-1}}\varepsilon_{t-1} +\sqrt{\beta_t}\varepsilon_t) \\
= \underbrace{k_t k_{t-1}\cdots k_1 x_0}_{\mu_t} + \underbrace{ ((k_tk_{t-1}\cdots k_2) \sqrt{\beta_{1}}\varepsilon_1+ \cdots +k_t\sqrt{\beta_{t-1}}\varepsilon_{t-1} +\sqrt{\beta_t}\varepsilon_t)}_{\sigma_t \varepsilon}
\]
根据 \(X+Y \sim \mathcal{N}(\mu_1+\mu_2, \sigma_1^2 + \sigma_2^2)\) 有 \(x_t\)的方差:
\]
希望最后一次加噪后的\(x_t\)为\(\mathcal{N}(0,I)\)分布纯噪声,即 \(\sigma_t^2 =1\)。解得 \(\beta_t=1-k_t^2\),即 \(k_t=\sqrt{1-\beta_t}, 0<k_t<1\),此时的均值 \(\mu_t= k_t k_{t-1}\cdots k_1 x_0\) 恰好也收敛于 0 。
x_t &=\sqrt{1-\beta_t}x_{t-1}+\sqrt{\beta_t}\varepsilon_t \\
q(x_t|x_{t-1}) &:= \mathcal{N}(x_t;\sqrt{1-\beta_t}x_{t-1},{\beta_t}I)
\end{align*}
\]
令 \(k_t=\sqrt{\alpha_t}=\sqrt{1-\beta_t}\),则有 \(\alpha_t + \beta_t =1\)。
q(x_t|x_{t-1}) &:= \mathcal{N}(x_t;\sqrt{\alpha_t}x_{t-1},{1-\alpha_t}I) \tag{1} \\
\end{align*}
\]
x_t&=\sqrt{\alpha_t}x_{t-1}+\sqrt{1-\alpha_t}\varepsilon_t \\
&= \sqrt{\alpha_t}\left(\sqrt{\alpha_{t-1}}x_{t-2}+\sqrt{1-\alpha_{t-1}}\varepsilon_{t-1}\right)+\sqrt{1-\alpha_t}\varepsilon_t \\
&=\sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \left[ \sqrt{\alpha_t-\alpha_t \alpha_{t-1}} \varepsilon_{t-1} + \sqrt{1-\alpha_t}\varepsilon_t \right] \\
&=\sqrt{\alpha_t \alpha_{t-1}} x_{t-2} + \sqrt{1-(\alpha_t \alpha_{t-1})} \bar{\varepsilon}_{t-2} \\
&=\cdots \\
&=\sqrt{\alpha_t \alpha_{t-1}\cdots \alpha_1} x_0 + \sqrt{1-(\alpha_t \alpha_{t-1}\cdots \alpha_1)} \bar{\varepsilon}_0
\end{align*}
\]
令 \(\bar{\alpha}_t=\alpha_t \alpha_{t-1}\cdots \alpha_1=\prod_{i=1}^t \alpha_i\),有
q(x_t|x_{0}) := \mathcal{N}(x_t;\sqrt{\bar{\alpha}_t}x_{0},{(1-\bar{\alpha}_t})I) \tag{2}
\]
其中 \(\bar{\varepsilon} \sim \mathcal{N}(0,I)\) 为纯噪声,\(\bar{\alpha}_t\) 控制每步掺入噪声的强度,可以设置为超参数。故 整个加噪过程是确定的,不需要模型学习,相当于给每步时间 t 制作的了一份可供模型学习的样本标签数据。公式 (1) 描述局部过程分布,公式 (2) 描述整体过程分布。
2.2 去噪解码
\]
设,神经网络的完整去噪过程为 \(p_\theta(x_{0}|x_t)\),由马尔科夫链有
\]
对于单步去噪的分布则定义为
\]
其中 均值 \(\mu_\theta\) 和 协方差 \(\Sigma_\theta\)(暂定)需要模型去学习得到。
如何从每步加噪 \(q(x_t|x_{t-1})\) 中,学习去噪的知识呢?我们先观察一下其逆过程 \(q(x_{t-1}|x_t)\) 的分布形式。
高斯分布:
p(x) &= \dfrac{1}{\sqrt{2\pi\sigma^{2}}} \exp \left ({-\dfrac{1}{2}(\dfrac{x-\mu}{\sigma})^{2}} \right) \\
&= \frac{1}{\sqrt{2\pi\sigma^2} } \exp \left[ -\frac{1}{2\sigma^2} \left( x^2 - 2\mu x + \mu^2 \right ) \right]
\end{aligned}
\]
逆过程:
q(x_{t-1}|x_t)&\overset{}{=}q(x_{t-1}|x_t,x_0) \qquad \text{(加噪过程中x0是已知的,相当于给逆向过程指明了方向)} \\
&\overset{Bayes}{=}\dfrac{q(x_t|x_{t-1},x_0)q(x_{t-1}|x_0)}{q(x_t|x_0)} \overset{Markov}{=} \dfrac{q(x_t|x_{t-1})q(x_{t-1}|x_0)}{q(x_t|x_0)} \\
&\overset{公式(1)(2)}{=} \dfrac{\mathcal{N}(x_{t};\sqrt{{\alpha}_t}x_{t-1},{(1-{\alpha}_t})I) \mathcal{N}(x_{t-1};\sqrt{\bar{\alpha}_{t-1}}x_{0},{(1-\bar{\alpha}_{t-1}})I)}{\mathcal{N}(x_t;\sqrt{\bar{\alpha}_t}x_{0},(1-\bar{\alpha}_t)I)} \\
&\overset{Gaussian}{\propto} \exp \left \{ - \dfrac{1}{2} \left[ \dfrac{(x_t - \sqrt{\alpha_t}x_{t-1})^2}{1-\alpha_t} + \dfrac{(x_{t-1} - \sqrt{\bar{\alpha}_{t-1}}x_{0})^2}{1-\bar{\alpha}_{t-1}} -\dfrac{(x_{t} - \sqrt{\bar{\alpha}_t}x_{0})^2}{1-\bar{\alpha}_t} \right] \right\} \\
&\overset{通分配方}{=}\exp \left \{ - \dfrac{1}{2} \left( 1/ \dfrac{(1-{\alpha}_{t})(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_{t}} \right) \left[x_{t-1}^2 - 2 \dfrac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})x_t + \sqrt{\bar{\alpha}_{t-1}}(1-\alpha_{t})x_0}{1-\bar{\alpha}_{t}} x_{t-1} + C(x_t,x_0) \right] \right \} \\
&\overset{C(x_t,x_0)为常数}{\propto} \mathcal{N}(x_{t-1};\underbrace{\dfrac{\sqrt{\alpha_t}(1-\bar{\alpha}_{t-1})x_t + \sqrt{\bar{\alpha}_{t-1}}(1-\alpha_{t})x_0}{1-\bar{\alpha}_{t}}}_{\mu_q(x_t,x_0)}, \underbrace{\dfrac{(1-{\alpha}_{t})(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_{t}}I}_{\Sigma_q(t)})
\end{align*}
\]
由此可知 \(q(x_{t-1}|x_t)\) 服从高斯分布 \(\mathcal{N}(x_{t-1};\mu_q(x_t,x_0),\Sigma_q(t))\) , 其中 均值\(\mu_q(x_t,x_0)\)可以看作是只与 \(x_0\) 有关的函数,\(\Sigma_q(t)=\sigma_q^2(t)I\) 只与时间步 t 有关,可以看作常数,令 \(\Sigma_\theta(x_t,t)=\Sigma_q(t)\) 即可。
此时,确定优化目标只需要 \(q(x_{t-1}|x_t)\) 和 \(p_\theta(x_{t-1}|x_t)\) 两个分布尽可能相似即可,即最小化两个分布的KL散度来度量。
两个高斯分布的KL散度公式:
\]
代入公式
&\quad \ \underset{\theta}{argmin} D_{KL}(q(x_{t-1}|x_t)||p_\theta(x_{t-1}|x_t)) \\
&=\underset{\theta}{argmin} D_{KL}(\mathcal{N}(x_{t-1};\mu_q, \Sigma_q(t))||\mathcal{N}(x_{t-1};\mu_\theta, \Sigma_q(t))) \\
&=\underset{\theta}{argmin} \dfrac{1}{2} \left[ log\dfrac{|\Sigma_q(t)|}{|\Sigma_q(t)|} - k + tr(\Sigma_q(t)^{-1}\Sigma_q(t)) + (\mu_q-\mu_\theta)^T \Sigma_q(t)^{-1} (\mu_q-\mu_\theta) \right] \\
&=\underset{\theta}{argmin} \dfrac{1}{2} \left[ 0 - k + k + (\mu_q-\mu_\theta)^T (\sigma_q^2(t)I)^{-1} (\mu_q-\mu_\theta) \right] \\
&\overset{内积公式A^TA}{=} \underset{\theta}{argmin} \dfrac{1}{2\sigma_q^2(t)} \left[ ||\mu_q-\mu_\theta||_2^2 \right]
\end{align*}
\]
此时,KL散度最小,只要两个分布的均值 \(\mu_q(x_t,x_0)\) \(\mu_\theta(x_t,t)\) 相近即可。又:
\]
所以,相似的可以把 \(\mu_\theta(x_t,t)\) 设计成如下形式:
\]
代入 \(\mu_q(x_t,x_0)\) \(\mu_\theta(x_t,t)\) 可得:
& \quad \underset{\theta}{argmin} \dfrac{1}{2\sigma_q^2(t)} \left[ ||\mu_q-\mu_\theta||_2^2 \right] \\
&= \underset{\theta}{argmin} \dfrac{1}{2\sigma_q^2(t)} \dfrac{{\bar{\alpha}_{t-1}} (1-\alpha_{t})^2}{(1-\bar{\alpha}_{t})^2} \left[ ||\hat{x}_\theta(x_t,t)-x_0||_2^2 \right] \\
&\overset{代入\sigma_q^2(t)}{=} \underset{\theta}{argmin} \dfrac{1}{2} \left( \dfrac{\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t-1}} - \dfrac{\bar{\alpha}_{t}}{1-\bar{\alpha}_{t}} \right) \left[ ||\hat{x}_\theta(x_t,t)-x_0||_2^2 \right]
\end{align*}
\]
至此, \(\underset{\theta}{argmin} D_{KL}(q(x_{t-1}|x_t)||p_\theta(x_{t-1}|x_t))\) 的问题,被转化成了通过给定 \((x_t,t)\) 让模型预测图片 \(\hat{x}_\theta(x_t,t)\) 对比 真实图片 \(x_0\) 的问题 (Dalle2的训练采用此方式)。
然而,后续研究发现通过噪声直接预测图片的训练效果不太理想,DDPM通过重参数化把对图片的预测转化成对噪声的预测,获得了更好的实验效果。
x_0 = \dfrac{1}{\sqrt{\bar{\alpha}_t}}x_t - \dfrac{\sqrt{1-\bar{\alpha}_t}}{\sqrt{\bar{\alpha}_t}}\bar{\varepsilon}_0 \\
\]
\]
\(\mu_q(x_t,x_0)\) 代入 \(x_0\)
= \dfrac{1}{\sqrt{{\alpha}_t}}x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}\sqrt{\alpha_t}}\bar{\varepsilon}_0
\]
同理,\(\mu_\theta(x_t,t)\) 也设计成相近的形式:
\]
计算此时的KL散度:
&\quad \ \underset{\theta}{argmin} D_{KL}(q(x_{t-1}|x_t)||p_\theta(x_{t-1}|x_t)) \\
&=\underset{\theta}{argmin} D_{KL}(\mathcal{N}(x_{t-1};\mu_q, \Sigma_q(t))||\mathcal{N}(x_{t-1};\mu_\theta, \Sigma_q(t))) \\
&= \underset{\theta}{argmin} \dfrac{1}{2\sigma_q^2(t)} \left[ \Vert \mu_q(x_t,x_0) - \mu_\theta(x_t,t) \Vert _2^2 \right] \\
&= \underset{\theta}{argmin} \dfrac{1}{2\sigma_q^2(t)} \left[ \left \Vert \dfrac{1}{\sqrt{{\alpha}_t}}x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}\sqrt{\alpha_t}}\bar{\varepsilon}_0 - (\dfrac{1}{\sqrt{{\alpha}_t}}x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}\sqrt{\alpha_t}}\hat{\epsilon}_\theta(x_t,t)) \right \Vert _2^2 \right] \\
&=\underset{\theta}{argmin} \dfrac{1}{2} \left( \dfrac{\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t-1}} - \dfrac{\bar{\alpha}_{t}}{1-\bar{\alpha}_{t}} \right) \left[ \Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(x_t,t) \Vert_2^2 \right] \\
&\overset{代入x_t}{=} \underset{\theta}{argmin} \dfrac{1}{2} \left( \dfrac{\bar{\alpha}_{t-1}}{1-\bar{\alpha}_{t-1}} - \dfrac{\bar{\alpha}_{t}}{1-\bar{\alpha}_{t}} \right) \left[ \Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \bar{\varepsilon}_0,t) \Vert_2^2 \right] \\
&
\end{align*}
\]
由此可见,这两种方法在本质上是等价的,\(\Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(x_t,t) \Vert_2^2\) 更关注对加入的噪声的预测。
通俗的解释:给模型 一张加过噪的图片 和 时间步,让模型预测出最初的纯噪声长什么样子。

对于整个过程损失只需每步的损失都是最小即可:\(min\ L_{simple} = \mathbb{E}_{t\sim U\{2,T\}}\underset{\theta}{argmin}[\Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(x_t,t) \Vert_2^2]\)。
2.2.1 模型推理的采样过程
由模型的单步去噪的分布定义:
\]
重参数化,代入 \(\mu_\theta\) \(\Sigma_\theta\):
x_{t-1} &= \mu_\theta(x_t,t) + \sqrt{\Sigma_\theta(x_t,t)}\ \mathrm{z},\quad \mathrm{z}\sim\mathcal{N}(0,I) \\
&= \left(\dfrac{1}{\sqrt{{\alpha}_t}}x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}\sqrt{\alpha_t}}\hat{\epsilon}_\theta(x_t,t) \right) + \sigma_q(t) \mathrm{z} \\
&= \dfrac{1}{\sqrt{{\alpha}_t}}\left( x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}}\hat{\epsilon}_\theta(x_t,t) \right) + \sigma_q(t) \mathrm{z}
\end{align*}
\]
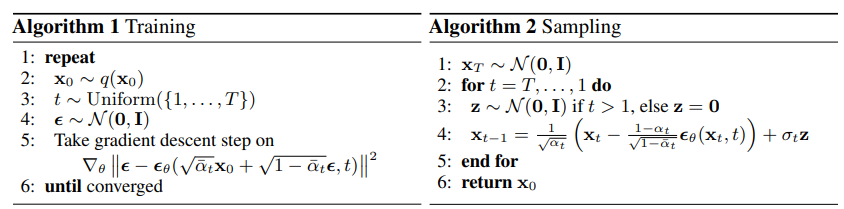
综上,
训练过程:抽取图片 \(x_0\) 和 噪声 \(\bar{\varepsilon}_0\),循环时间步 \(t\sim U\{1,\cdots,T\}\):
- 预测噪声损失 \(\Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \bar{\varepsilon}_0,t) \Vert_2^2\)
- 然后抽取下一张图片,重复过程,直至损失收敛。
推理过程:随机初始噪声图片 \(x_T\),倒序循环时间步 \(t\sim U\{T,\cdots,1\}\) :
- 用模型采样噪声 \(\epsilon_\theta(x_t,t)\)
- 【噪声图片 \(x_t\)】-【采样噪声\(\epsilon_\theta\)】+【随机扰动方差噪声\(\sigma_q(t) \mathrm{z}\)】=【噪声图片 \(x_{t-1}\)】
- 【噪声图片 \(x_{t-1}\)】进行处理,至 \(t=1\) 时,不加扰动
- 【噪声图片 \(x_1\)】-【采样噪声\(\epsilon_\theta\)】= 【真实图片 \(x_{0}\)】
代码实现
超参数选择
时间步 \(T=1000\)
令 \(\bar{\beta_t}={1-\bar{\alpha}_t}= \prod \beta_t\)
加噪过程,每次只加入少许噪声,加噪至最后图片已经接近纯噪声需要稍微加大噪声。
确定取值范围 \(\beta_t \in [0.0001, 0.002]\)
!export CUDA_LAUNCH_BLOCKING=1
import os
from pathlib import Path
import math
import torch
import torchvision
import numpy as np
from torchvision import transforms
from torch.utils.data import DataLoader, Dataset
from torch.nn import Module, ModuleList
from torch import nn
import torch.nn.functional as F
from torch.optim import Adam
from einops import rearrange
from einops.layers.torch import Rearrange
import matplotlib.pyplot as plt
import PIL
class MyDataset(Dataset):
def __init__(
self,
folder,
image_size = 96,
exts = ['jpg', 'jpeg', 'png', 'tiff']
):
super().__init__()
self.folder = folder
self.image_size = image_size
self.paths = [p for ext in exts for p in Path(f'{folder}').glob(f'**/*.{ext}')]
self.transform = transforms.Compose([
transforms.Resize((self.image_size, self.image_size)),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(), # Scales data into [0,1]
transforms.Lambda(lambda t: (t * 2) - 1), # Scale between [-1, 1]
])
def __len__(self):
return len(self.paths)
def __getitem__(self, index):
path = self.paths[index]
img = PIL.Image.open(path)
return self.transform(img)
def show_img_batch(batch, num_samples=16, cols=4):
reverse_transforms = transforms.Compose(
[
transforms.Lambda(lambda t: (t + 1) / 2), # [-1,1] -> [0,1]
transforms.Lambda(lambda t: t.permute(1, 2, 0)), # CHW to HWC
transforms.Lambda(lambda t: t * 255.0),
transforms.Lambda(lambda t: t.numpy().astype(np.uint8)),
transforms.ToPILImage(),
]
)
"""Plots some samples from the dataset"""
plt.figure(figsize=(10, 10))
for i in range(batch.shape[0]):
if i == num_samples:
break
plt.subplot(int(num_samples / cols) + 1, cols, i + 1)
plt.imshow(reverse_transforms(batch[i, :, :, :]))
plt.show()
# dataset = MyDataset("/data/dataset/img_align_celeba")
# # drop_last 保证 batch_size 一致
# loader = DataLoader(dataset, batch_size=32, shuffle=True, drop_last=True)
# for batch in loader:
# show_img_batch(batch)
# break
#时间转向量
class SinusoidalPosEmb(Module):
def __init__(self, dim, theta = 10000):
super().__init__()
self.dim = dim
self.theta = theta
def forward(self, x):
device = x.device
half_dim = self.dim // 2
emb = math.log(self.theta) / (half_dim - 1)
emb = torch.exp(torch.arange(half_dim, device=device) * -emb)
emb = x[:, None] * emb[None, :]
emb = torch.cat((emb.sin(), emb.cos()), dim=-1)
return emb
class Block(Module):
def __init__(self, dim, dim_out, up = False, dropout = 0.001):
super().__init__()
self.norm = nn.GroupNorm(num_groups=32, num_channels=dim) # 总通道dim,分为32组
self.proj = nn.Conv2d(dim, dim_out, 3, padding = 1)
self.act = nn.SiLU()
self.dropout = nn.Dropout(dropout)
def forward(self, x, scale_shift = None):
x = self.norm(x)
x = self.proj(x)
if (scale_shift is not None):
scale, shift = scale_shift
x = x * (scale + 1) + shift
x = self.act(x)
return self.dropout(x)
class AttnBlock(nn.Module):
def __init__(self, in_ch, out_ch, time_mlp_dim, up=False, isLast = False):
super().__init__()
# 使用 AdaLN 生成 scale, shift 这里输出channel乘2再拆分
self.time_condition = nn.Sequential(
nn.Linear(time_mlp_dim, time_mlp_dim),
nn.SiLU(),
nn.Linear(time_mlp_dim, out_ch * 2)
)
self.norm1 = nn.GroupNorm(num_groups=32, num_channels=in_ch)
self.norm2 = nn.GroupNorm(num_groups=32, num_channels=out_ch)
self.act1 = nn.SiLU()
self.short_cut = nn.Conv2d(in_ch, out_ch, 1) if in_ch != out_ch else nn.Identity()
# self.attention = Attention(out_ch, heads = 4)
if up:
self.sample = nn.Sequential(
nn.Upsample(scale_factor = 2, mode = 'nearest'), # 直接插值,原地卷积
nn.Conv2d(in_ch, in_ch, 3, padding = 1)
)
else: # down
self.sample = nn.Conv2d(in_ch, in_ch, 3, 2, 1)
if isLast: # 最底层不缩放
self.sample = nn.Conv2d(out_ch, out_ch, 3, padding = 1)
self.conv1 = nn.Conv2d(in_ch, out_ch, 3, padding = 1, groups=32)
self.conv2 = nn.Conv2d(out_ch, out_ch, 3, padding = 1)
self.dropout = nn.Dropout(0.01)
def forward(self, x, time_emb):
x = self.norm1(x)
h = self.sample(x)
x = self.sample(x)
h = self.act1(h)
h = self.conv1(h)
# (b, time_mlp_dim) -> (b, c+c)
time_emb = self.time_condition(time_emb)
time_emb = rearrange(time_emb, 'b c -> b c 1 1') # b c+c 1 1
scale, shift = time_emb.chunk(2, dim = 1)
h = h * (scale + 1) + shift
h = self.norm2(h)
h = self.act1(h)
h = self.conv2(h)
h = self.dropout(h)
h = h + self.short_cut(x)
return h
class Unet(Module):
def __init__(
self,
image_channel = 3,
init_dim = 32,
down_channels = [(32, 64), (64, 128), (128, 256), (256, 512)],
up_channels = [(512+512, 256), (256+256, 128), (128+128, 64), (64+64, 32)], #这里需要跳跃拼接,所以输入维度有两个拼一起
):
super().__init__()
self.init_conv = nn.Conv2d(image_channel, init_dim, 7, padding = 3)
time_pos_dim = 32
time_mlp_dim = time_pos_dim * 4
self.time_mlp = nn.Sequential(
SinusoidalPosEmb(time_pos_dim),
nn.Linear(time_pos_dim, time_mlp_dim),
nn.GELU()
)
self.downs = ModuleList([])
self.ups = ModuleList([])
for i in range(len(down_channels)):
down_in, down_out = down_channels[i]
isLast = len(down_channels)-1 == i # 底部
self.downs.append(AttnBlock(down_in, down_out, time_mlp_dim, up=False, isLast=False))
for i in range(len(up_channels)):
up_in, up_out = up_channels[i]
isLast = 0 == i # 底部
self.ups.append(AttnBlock(up_in, up_out, time_mlp_dim, up=True, isLast=False))
self.output = nn.Conv2d(init_dim, image_channel, 1)
for p in self.parameters():
if p.dim() > 1:
nn.init.xavier_uniform_(p) #初始化权重
def forward(self, img, time):
# 时间转向量 time (b, 1) -> (b, time_mlp_dim)
time_emb = self.time_mlp(time)
x = self.init_conv(img)
skip_connect = []
for down in self.downs:
x = down(x, time_emb)
skip_connect.append(x)
for up in self.ups:
x = torch.cat((x, skip_connect.pop()), dim=1) #先在通道上拼接 再输入
x = up(x, time_emb)
return self.output(x)
# device = "cuda"
# model = Unet().to(device)
# img_size = 64
# img = torch.randn((1, 3, img_size, img_size)).to(device)
# time = torch.tensor([4]).to(device)
# print(model(img, time).shape)
预测噪声损失 \(\Vert \bar{\varepsilon}_0 - \hat{\epsilon}_\theta(\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \bar{\varepsilon}_0,t) \Vert_2^2\)
最大时间步 \(T=1000\)
加噪过程,每次只加入少许噪声,加噪至最后图片已经接近纯噪声需要稍微加大噪声。
确定取值范围 \(\beta_t \in [0.0001, 0.02]\) 令 \(\bar{\beta_t}={1-\bar{\alpha}_t}\)
模型输入参数:
img = \((\sqrt{\bar{\alpha}_t} x_0 + \sqrt{1-\bar{\alpha}_t} \bar{\varepsilon}_0)\)
time = \(t\)
image_size=96
epochs = 500
batch_size = 128
device = 'cuda'
T=1000
betas = torch.linspace(0.0001, 0.02, T).to('cuda') # torch.Size([1000])
# train
alphas = 1 - betas # 0.9999 -> 0.98
alphas_cumprod = torch.cumprod(alphas, axis=0) # 0.9999 -> 0.0000
sqrt_alphas_cumprod = torch.sqrt(alphas_cumprod)
sqrt_one_minus_alphas_cumprod = torch.sqrt(1-alphas_cumprod)
def get_val_by_index(val, t, x_shape):
batch_t = t.shape[0]
out = val.gather(-1, t)
return out.reshape(batch_t, *((1,) * (len(x_shape) - 1))) # torch.Size([batch_t, 1, 1, 1])
def q_sample(x_0, t, noise):
device = x_0.device
sqrt_alphas_cumprod_t = get_val_by_index(sqrt_alphas_cumprod, t, x_0.shape)
sqrt_one_minus_alphas_cumprod_t = get_val_by_index(sqrt_one_minus_alphas_cumprod, t, x_0.shape)
noised_img = sqrt_alphas_cumprod_t * x_0 + sqrt_one_minus_alphas_cumprod_t * noise
return noised_img
# 校验输入的噪声图片
def print_noised_img():
# print(alphas)
# print(sqrt_alphas_cumprod)
# print(sqrt_one_minus_alphas_cumprod)
test_dataset = MyDataset("/data/dataset/img_align_celeba", image_size=96)
# drop_last 保证 batch_size 一致
test_loader = DataLoader(dataset, batch_size=1, shuffle=True, drop_last=True)
for batch in test_loader:
test_img = batch.to(device)
# img = torch.randn((batch_size, 3, 64, 64)).to(device)
time = torch.randint(190, 191, (1,), device=device).long()
out = get_val_by_index(sqrt_alphas_cumprod, time, img.shape)
# print('out', out)
noise = torch.randn_like(test_img, device=img.device)
# print('noise', noise, torch.mean(noise))
noised_img = q_sample(test_img, time, noise)
# print(noised_img.shape)
show_img_batch(noised_img.detach().cpu())
break
def train(checkpoint_prefix=None, start_epoch = 0):
dataset = MyDataset("/data/dataset/img_align_celeba", image_size=image_size)
# drop_last 保证 batch_size 一致
loader = DataLoader(dataset, batch_size=batch_size, shuffle=True, drop_last=True)
model = Unet().to(device)
if start_epoch > 0:
model.load_state_dict(torch.load(f'{checkpoint_prefix}_{start_epoch}.pth'))
# optimizer = torch.optim.AdamW(model.parameters(), lr=1e-5)
optimizer = torch.optim.Adam(model.parameters(), lr=0.0002)
for epoch in range(epochs):
epoch += 1
batch_idx = 0
for batch in loader:
batch_idx += 1
img = batch.to(device)
time = torch.randint(0, T, (batch_size,), device=device).long()
noise = torch.randn_like(img, device=img.device)
noised_img = q_sample(img, time, noise)
noise_pred = model(noised_img, time)
# loss = F.mse_loss(noise, noise_pred, reduction='sum')
loss = (noise - noise_pred).square().sum(dim=(1, 2, 3)).mean(dim=0)
loss.backward()
optimizer.step()
optimizer.zero_grad()
if batch_idx % 100 == 0:
print(f"Epoch {epoch+start_epoch} | Batch index {batch_idx:03d} Loss: {loss.item()}")
if epoch % 100 == 0:
torch.save(model.state_dict(), f'{checkpoint_prefix}_{start_epoch+epoch}.pth')
train(checkpoint_prefix='ddpm_T1000_l2_epochs', start_epoch = 0)
Epoch 1 | Batch index 100 Loss: 20164.40625
...
Epoch 300 | Batch index 100 Loss: 343.15917
训练完成后,从模型中采样图片
\(x_{t-1}=\dfrac{1}{\sqrt{{\alpha}_t}}\left( x_t - \dfrac{1-{\alpha}_{t}}{\sqrt{1-\bar{\alpha}_t}}\hat{\epsilon}_\theta(x_t,t) \right) + \sigma_q(t) \mathrm{z}\)
\(\sigma^2_q(t)={\dfrac{(1-{\alpha}_{t})(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_{t}}}\) ,则 \(\sigma_q(t)=\sqrt{\dfrac{(1-{\alpha}_{t})(1-\bar{\alpha}_{t-1})}{1-\bar{\alpha}_{t}}}\) 且 t=1 时,\(\sigma_q(t)=0\)
torch.cuda.empty_cache()
model = Unet().to(device)
model.load_state_dict(torch.load('ddpm_T1000_l2_epochs_300.pth'))
model.eval()
print("")
# 计算去噪系数
one_divided_sqrt_alphas = 1 / torch.sqrt(alphas)
sqrt_one_minus_alphas_cumprod = sqrt_one_minus_alphas_cumprod
# 计算方差
alphas_cumprod = alphas_cumprod
# 去掉最后一位,(1, 0)表示左侧 填充 1.0, 表示 alphas t-1
alphas_cumprod_prev = F.pad(alphas_cumprod[:-1], (1, 0), value=1.0)
std_variance_q = torch.sqrt((1-alphas) * (1-alphas_cumprod_prev) / (1-alphas_cumprod))
def p_sample_ddpm(model):
def step_denoise(model, x_t, t):
one_divided_sqrt_alphas_t = get_val_by_index(one_divided_sqrt_alphas, t, x_t.shape)
one_minus_alphas_t = get_val_by_index(1-alphas, t, x_t.shape)
one_minus_alphas_cumprod_t = get_val_by_index(sqrt_one_minus_alphas_cumprod, t, x_t.shape)
mean = one_divided_sqrt_alphas_t * (x_t - (one_minus_alphas_t / one_minus_alphas_cumprod_t * model(x_t, t)))
std_variance_q_t = get_val_by_index(std_variance_q, t, x_t.shape)
if t == 0:
return mean
else:
noise_z = torch.randn_like(x_t, device=x_t.device)
return mean + std_variance_q_t * noise_z
img_pred = torch.randn((4, 3, image_size, image_size), device=device)
for i in reversed(range(0, T)):
t = torch.tensor([i], device=device, dtype=torch.long)
img_pred = step_denoise(model, img_pred, t)
# print(img_pred.mean())
# 每步截断效果比较差
# if i % 200 == 0:
# img_pred = torch.clamp(img_pred, -1.0, 1.0)
torch.cuda.empty_cache()
return img_pred
with torch.no_grad():
img = p_sample_ddpm(model)
img = torch.clamp(img, -1.0, 1.0)
show_img_batch(img.detach().cpu())
参考文章:
Denoising Diffusion Probabilistic Model
Improved Denoising Diffusion Probabilistic Models
Understanding Diffusion Models: A Unified Perspective
Improved Denoising Diffusion Probabilistic Models
Diffusion系列 - DDPM 公式推导 + 代码 -(二)的更多相关文章
- Android系列之网络(二)----HTTP请求头与响应头
[声明] 欢迎转载,但请保留文章原始出处→_→ 生命壹号:http://www.cnblogs.com/smyhvae/ 文章来源:http://www.cnblogs.com/smyhvae/p/ ...
- Android系列之Fragment(二)----Fragment的生命周期和返回栈
[声明] 欢迎转载,但请保留文章原始出处→_→ 生命壹号:http://www.cnblogs.com/smyhvae/ 文章来源:http://www.cnblogs.com/smyhvae/p/ ...
- ReactiveSwift源码解析(九) SignalProducerProtocol延展中的Start、Lift系列方法的代码实现
上篇博客我们聊完SignalProducer结构体的基本实现后,我们接下来就聊一下SignalProducerProtocol延展中的start和lift系列方法.SignalProducer结构体的 ...
- Django 系列博客(二)
Django 系列博客(二) 前言 今天博客的内容为使用 Django 完成第一个 Django 页面,并进行一些简单页面的搭建和转跳. 命令行搭建 Django 项目 创建纯净虚拟环境 在上一篇博客 ...
- JavaScript 系列博客(二)
JavaScript 系列博客(二) 前言 本篇博客介绍 js 中的运算符.条件语句.循环语句以及数组. 运算符 算术运算符 // + | - | * | / | % | ++ | -- consol ...
- Linux Shell系列教程之(二)第一个Shell脚本
本文是Linux Shell系列教程的第(二)篇,更多shell教程请看:Linux Shell系列教程 通过上一篇教程的学习,相信大家已经能够对shell建立起一个大体的印象了,接下来,我们通过一个 ...
- Spring Boot干货系列:(十二)Spring Boot使用单元测试(转)
前言这次来介绍下Spring Boot中对单元测试的整合使用,本篇会通过以下4点来介绍,基本满足日常需求 Service层单元测试 Controller层单元测试 新断言assertThat使用 单元 ...
- 《手把手教你》系列技巧篇(二十三)-java+ selenium自动化测试-webdriver处理浏览器多窗口切换下卷(详细教程)
1.简介 上一篇讲解和分享了如何获取浏览器窗口的句柄,那么今天这一篇就是讲解获取后我们要做什么,就是利用获取的句柄进行浏览器窗口的切换来分别定位不同页面中的元素进行操作. 2.为什么要切换窗口? Se ...
- 《手把手教你》系列技巧篇(二十七)-java+ selenium自动化测试- quit和close的区别(详解教程)
1.简介 尽管有的小伙伴或者童鞋们觉得很简单,不就是关闭退出浏览器,但是宏哥还是把两个方法的区别说一下,不然遇到坑后根本不会想到是这里的问题. 2.源码 本文介绍webdriver中关于浏览器退出操作 ...
- 《手把手教你》系列技巧篇(二十八)-java+ selenium自动化测试-处理模态对话框弹窗(详解教程)
1.简介 在前边的文章中窗口句柄切换宏哥介绍了switchTo方法,这篇继续介绍switchTo中关于处理alert弹窗的问题.很多时候,我们进入一个网站,就会弹窗一个alert框,有些我们直接关闭, ...
随机推荐
- 【Java】MultiThread 多线程 Re01
学习参考: https://www.bilibili.com/video/BV1ut411T7Yg 一.线程创建的四种方式: 1.集成线程类 /** * 使用匿名内部类实现子线程类,重写Run方法 * ...
- 【Zookeeper】Re01 安装与操作
Zookeeper基于JDK开发出来的 运行环境至少需要JRE 快速安装JDK: yum install -y java-1.8.0-openjdk-devel.x86_64 # ZK镜像仓库 htt ...
- 【Java】 WebService 校验机制
测试环境域名 不可见 正式环境域名 不可见 1.2.安全校验凭证 accessId(授权ID) 测试/正式待定 securityKey(加密密钥) 测试/正式待定 1.3.安全校验机制 1.3.1.在 ...
- 【Lodop】02 C-Lodop手册阅读上手
版本:4.0.6.2 一.概述 C-Lodop云打印是一款精巧快捷的云打印服务产品,以Lodop功能语句为基础,JS语句实现远程打印 移动设备+Wifi+普通打印机+集中打印 C-Lodop对客户端浏 ...
- 强化学习中Q-learning,DQN等off-policy算法不需要重要性采样的原因
在整理自己的学习笔记的时候突然看到了这个问题,这个问题是我多年前刚接触强化学习时候想到的问题,之后由于忙其他的事情就没有把这个问题终结,这里也就正好把这个问题重新的规整一下. 其实,这个DQN算法作为 ...
- Kotlin 循环与函数详解:高效编程指南
Kotlin 循环 当您处理数组时,经常需要遍历所有元素. 要遍历数组元素,请使用 for 循环和 in 操作符: 示例 输出 cars 数组中的所有元素: val cars = arrayOf(&q ...
- SMU Summer 2023 Contest Round 15
SMU Summer 2023 Contest Round 15 A. AB Balance 其实就只会更改一次 #include <bits/stdc++.h> #define int ...
- 华为交换机S5700-52C-EI开启ssh服务
参考资料 https://blog.csdn.net/qq_34815358/article/details/83865527 https://www.cnblogs.com/Cyanix/p/999 ...
- Cloud Studio:颠覆传统的云端开发与学习解决方案
Cloud Studio Cloud Studio(云端 IDE)是一款基于浏览器的集成开发环境,它为开发者提供了一个高效.稳定的云端工作站.用户在使用 Cloud Studio 时,无需进行任何本地 ...
- Docker 发布镜像
发布镜像 在 Docker Hub 发布镜像 登陆到 Docker Hub docker login 标记镜像并推送到 Docker Hub docker tag <image>:< ...