目标检测 IOU(交并比) 理解笔记
交并比(Intersection-over-Union,IoU):
目标检测中使用的一个概念
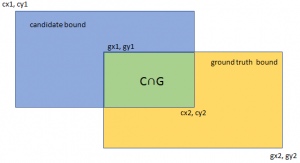
是产生的候选框(candidate bound)与原标记框(ground truth bound)的交叠率
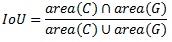
即它们的交集与并集的比值。最理想情况是完全重叠,即比值为1。
基础知识:
交集:
集合论中,设A,B是两个集合,由所有属于集合A且属于集合B的元素所组成的集合,叫做集合A与集合B的交集,记作A∩B。
eg:
A={1,2,3} B={2,3,4}
A n B = {2,3}
并集:
给定两个集合A,B,把他们所有的元素合并在一起组成的集合,叫做集合A与集合B的并集,记作A∪B,读作A并B。
eg:
A={1,2,3} B={2,3,4}
A U B = {1,2,3,4}
图示

IOU:

python实现
import numpy as np
def compute_iou(box1, box2, wh=False):
"""
compute the iou of two boxes.
Args:
box1, box2: [xmin, ymin, xmax, ymax] (wh=False) or [xcenter, ycenter, w, h] (wh=True)
wh: the format of coordinate.
Return:
iou: iou of box1 and box2.
"""
if wh == False:
xmin1, ymin1, xmax1, ymax1 = box1
xmin2, ymin2, xmax2, ymax2 = box2
else:
xmin1, ymin1 = int(box1[0]-box1[2]/2.0), int(box1[1]-box1[3]/2.0)
xmax1, ymax1 = int(box1[0]+box1[2]/2.0), int(box1[1]+box1[3]/2.0)
xmin2, ymin2 = int(box2[0]-box2[2]/2.0), int(box2[1]-box2[3]/2.0)
xmax2, ymax2 = int(box2[0]+box2[2]/2.0), int(box2[1]+box2[3]/2.0)
## 获取矩形框交集对应的左上角和右下角的坐标(intersection)
xx1 = np.max([xmin1, xmin2])
yy1 = np.max([ymin1, ymin2])
xx2 = np.min([xmax1, xmax2])
yy2 = np.min([ymax1, ymax2])
## 计算两个矩形框面积
area1 = (xmax1-xmin1) * (ymax1-ymin1)
area2 = (xmax2-xmin2) * (ymax2-ymin2)
inter_area = (np.max([0, xx2-xx1])) * (np.max([0, yy2-yy1])) #计算交集面积
iou = inter_area / (area1+area2-inter_area+1e-6) #计算交并比
return iou
参考
https://blog.csdn.net/sinat_34474705/article/details/80045294
https://blog.csdn.net/mdjxy63/article/details/79343733
目标检测 IOU(交并比) 理解笔记的更多相关文章
- 目标检测——IoU 计算
Iou 的计算 我们先考虑一维的情况:令 \(A = [x_1,x_2], B = [y_1, y_2]\),若想要 \(A\) 与 \(B\) 有交集,需要满足如下情况: 简言之,要保证 \(A\) ...
- zz目标检测
deep learning分类 目标检测-HyperNet-论文笔记 06-06 基础DL模型-Deformable Convolutional Networks-论文笔记 06-05 基础DL模型- ...
- 【目标检测】基于传统算法的目标检测方法总结概述 Viola-Jones | HOG+SVM | DPM | NMS
"目标检测"是当前计算机视觉和机器学习领域的研究热点.从Viola-Jones Detector.DPM等冷兵器时代的智慧到当今RCNN.YOLO等深度学习土壤孕育下的GPU暴力美 ...
- 目标检测 anchor 理解笔记
anchor在计算机视觉中有锚点或锚框,目标检测中常出现的anchor box是锚框,表示固定的参考框. 目标检测的任务: 在哪里有东西 难点: 目标的类别不确定.数量不确定.位置不确定.尺度不确定 ...
- 【55】目标检测之IOU交并比
交并比(Intersection over union) 你如何判断对象检测算法运作良好呢?在本笔记中,你将了解到并交比函数,可以用来评价对象检测算法.在下一个笔记中,我们用它来插入一个分量来进一步改 ...
- DeepLearning.ai学习笔记(四)卷积神经网络 -- week3 目标检测
一.目标定位 这一小节视频主要介绍了我们在实现目标定位时标签该如何定义. 上图左下角给出了损失函数的计算公式(这里使用的是平方差) 如图示,加入我们需要定位出图像中是否有pedestrian,car, ...
- 目标检测:YOLO(v1 to v3)——学习笔记
前段时间看了YOLO的论文,打算用YOLO模型做一个迁移学习,看看能不能用于项目中去.但在实践过程中感觉到对于YOLO的一些细节和技巧还是没有很好的理解,现学习其他人的博客总结(所有参考连接都附于最后 ...
- OpenCV 学习笔记 07 目标检测与识别
目标检测与识别是计算机视觉中最常见的挑战之一.属于高级主题. 本章节将扩展目标检测的概念,首先探讨人脸识别技术,然后将该技术应用到显示生活中的各种目标检测. 1 目标检测与识别技术 为了与OpenCV ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
随机推荐
- 测试APPEND INSERT是否产生UNDO信息的过程
D:\>sqlplus test/testSQL*Plus: Release 11.1.0.6.0 - Production on 星期三 06月 29 19:46:41 2016Copyrig ...
- Dubbo中消费者初始化的过程解析
首先还是Spring碰到dubbo的标签之后,会使用parseCustomElement解析dubbo标签,使用的解析器是dubbo的DubboBeanDefinitionParser,解析完成之后返 ...
- Spring IOC(二)容器初始化
本系列目录: Spring IOC(一)概览 Spring IOC(二)容器初始化 Spring IOC(三)依赖注入 Spring IOC(四)总结 目录 一.ApplicationContext接 ...
- Dashboard二次开发简明教程
Horizon简介 Horizon是OpenStack的一个子项目,用于提供一个Web前端控制台(称为Dashboard),以此来展示OpenStack的功能.通常情况下,我们都是从Horizon.D ...
- HTTP 和 WebSocket的区别
有关http和WebSocket 的区别网上有很多的质料. 个人在此仅仅是记录以下自己的学习心得,自己的理解. 1. http协议是用在应用层的协议,他是基于tcp协议的,http协议建立链接也必须要 ...
- 第十四章——循环神经网络(Recurrent Neural Networks)(第一部分)
由于本章过长,分为两个部分,这是第一部分. 这几年提到RNN,一般指Recurrent Neural Networks,至于翻译成循环神经网络还是递归神经网络都可以.wiki上面把Recurrent ...
- QTTabBar
出处:https://www.mokeyjay.com/archives/1811
- C++ bitset用法
概念: bitset是用来存储位的(其中的元素只有两种形式) 这个类通常用来模拟一个布尔数组,但对空间分配上进行了优化:通常,每个元素只占用一个bit ,而通常char类型是它的八倍 每个位置上的位都 ...
- C#相等性 - “==”
今天写一下C#里的“==”这个操作符. 原始类型 假象 在刚学C#的时候,我以为C#里的==和.NET里的object.Equals()方法是一样的,就是一个语法糖而已.其实它们的底层机制是不一样的, ...
- MySQL数据同步,出现Slave_SQL_Running:no和slave_io_running:no问题的解决方法
一.问题描述: 当我们配置好MySQL主主同步时,是可以实现主主同步,但是重启机器后就发现无法同步了. 二.Slave两个关键进程: mysql replication 中slave机器上有两个关键的 ...