Unity实现A*寻路算法学习1.0
一、A*寻路算法的原理
如果现在地图上存在两点A、B,这里设A为起点,B为目标点(终点)
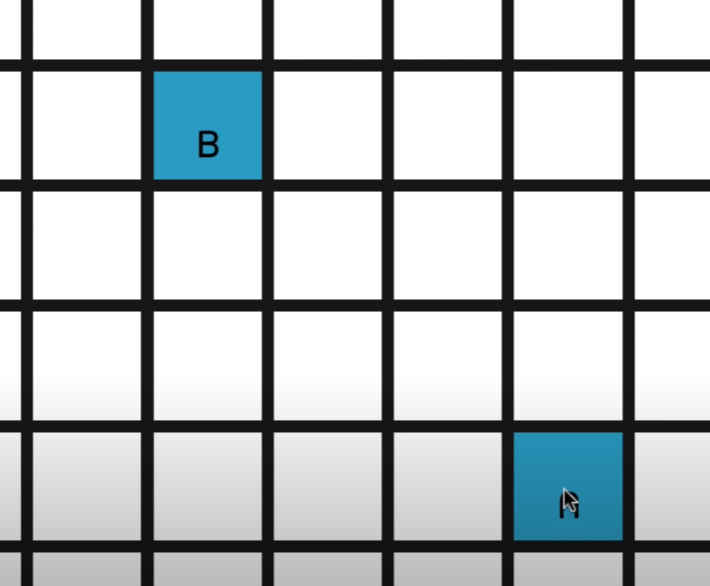
这里为每一个地图节点定义了三个值
gCost:距离起点的Cost(距离)
hCost:距离目标点的Cost(距离)
fCost:gCost和gCost之和。
这里的Cost可以采用直线距离,也可以采用曼哈顿距离等,只要适合就行
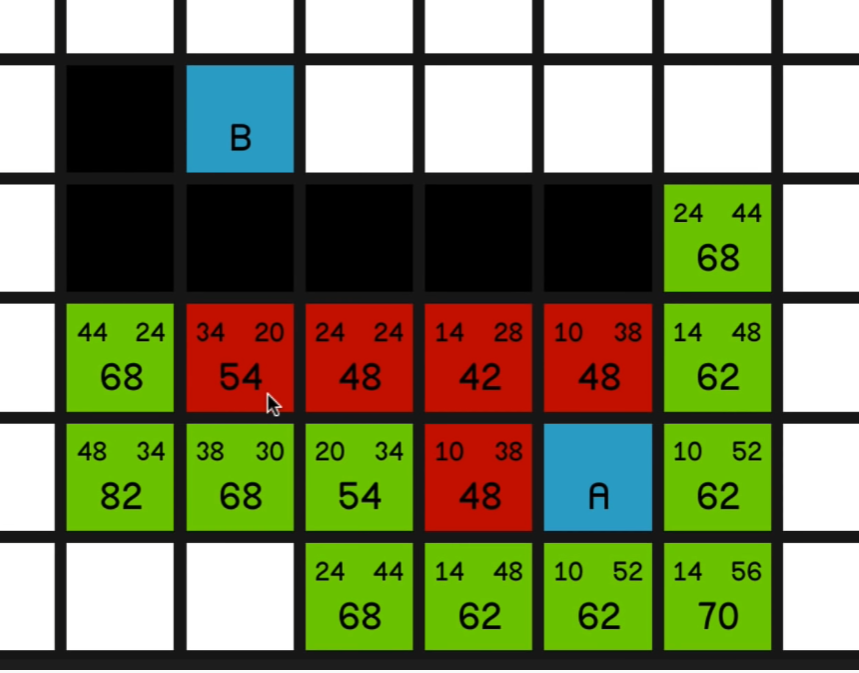
那么先计算起点周围的所有节点的三个值
这里设每两个相邻节点间的距离为10,那么对角线距离为14
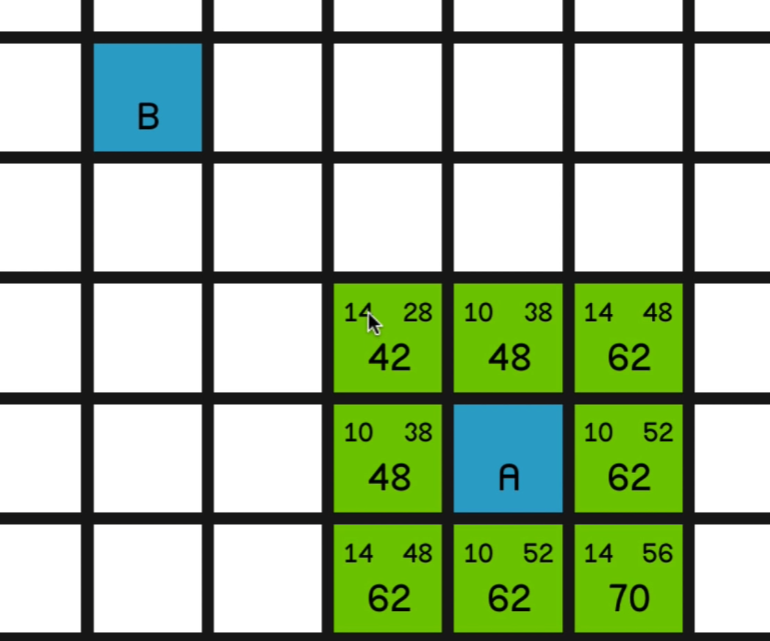
那么计算得出,F值最小的是A点左上角的方块,将节点放入列表(数组也行)将A设为该节点的父节点,然后计算周围方块的距离
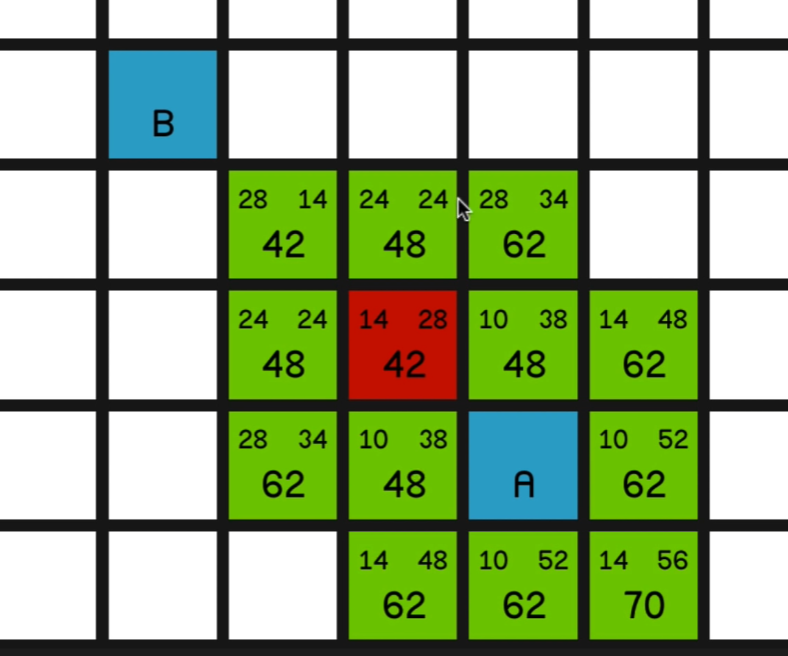
因为是从A点移动过来的,所以下次比较时不再比较A点
再次计算得出F值最小的仍然为左上角的节点

这样就求出了A到B点的最短路径
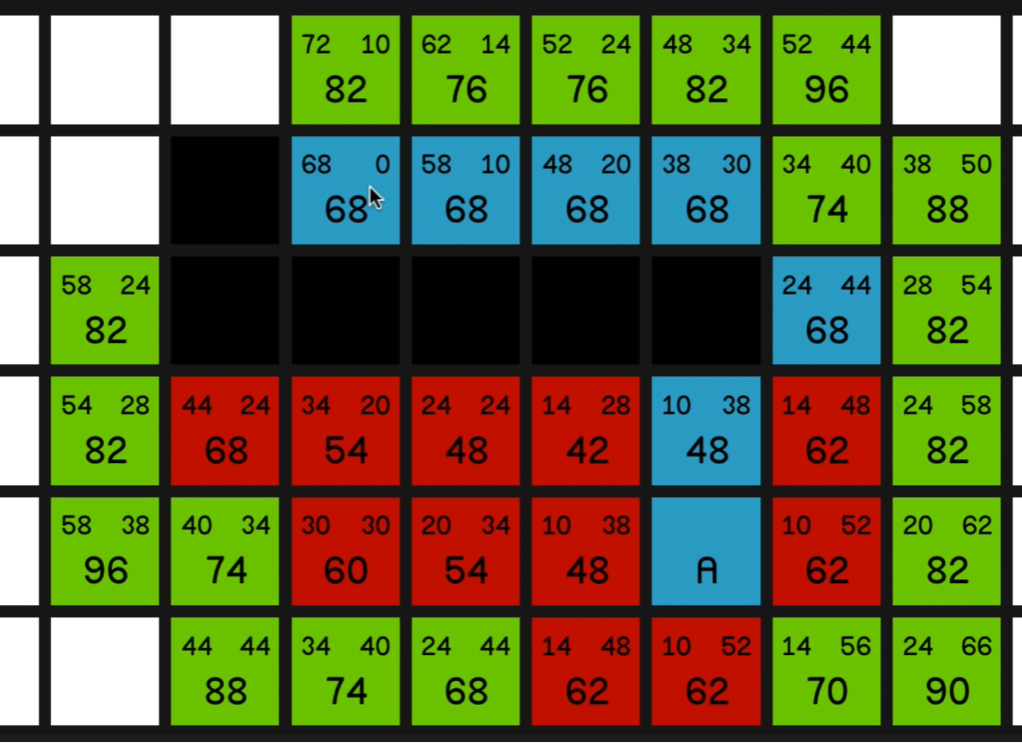
如果A、B之间存在障碍物那么又该怎么办呢?
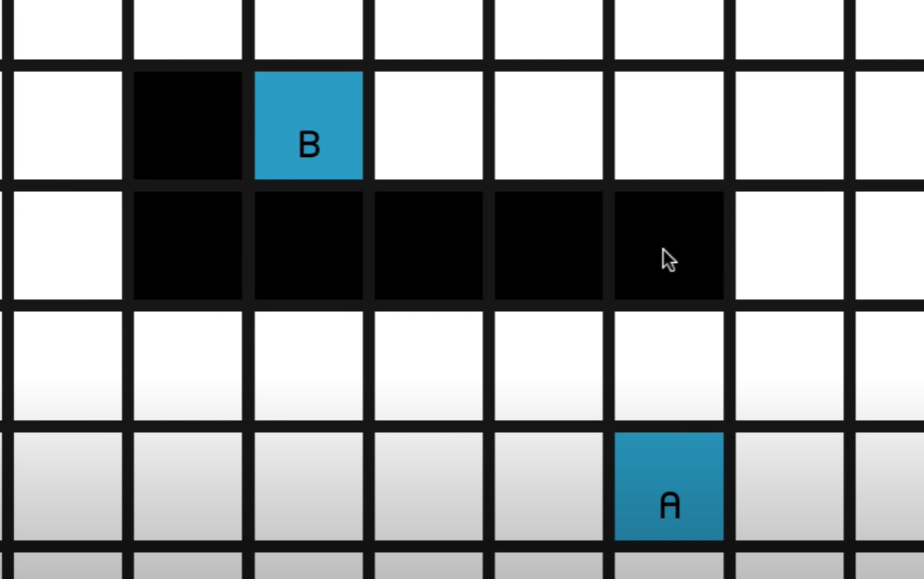
同样也是计算最小的 F 值
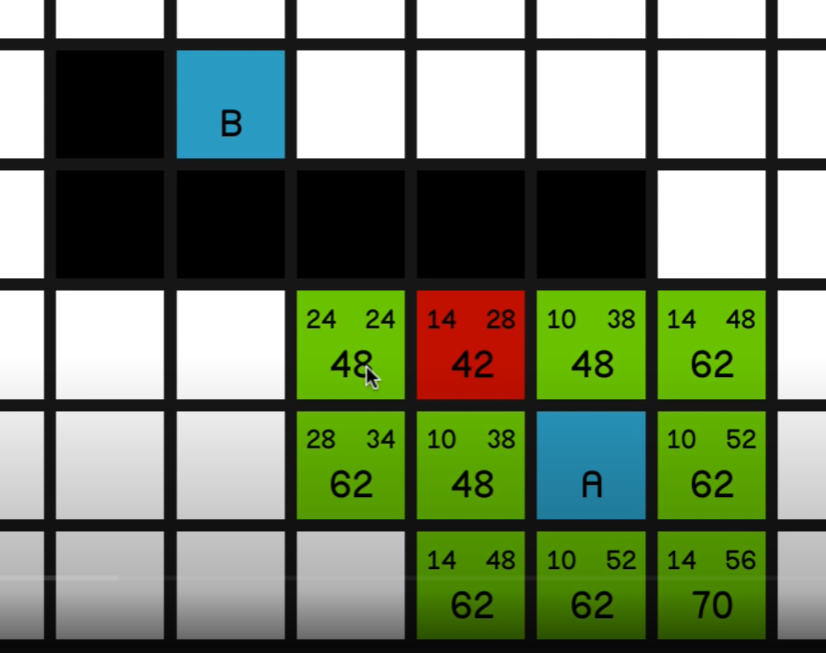
但这里出现了三个相同的F值
那么接下来优先选择 H 值最小的路径,即距离目标点最近的路径
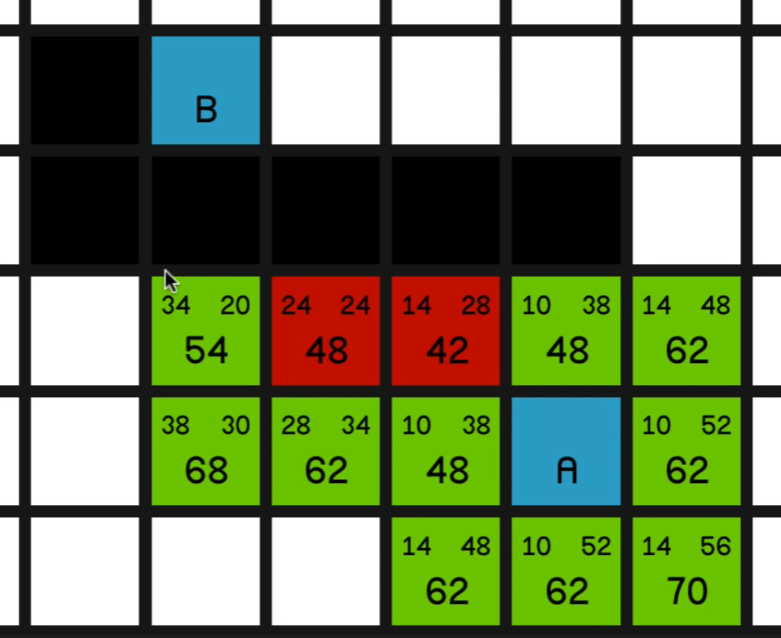
但是移动过后 F 值 反而变大了
那么反过来寻找之前 F 值最小的路径,但接下来还是 F 值更大
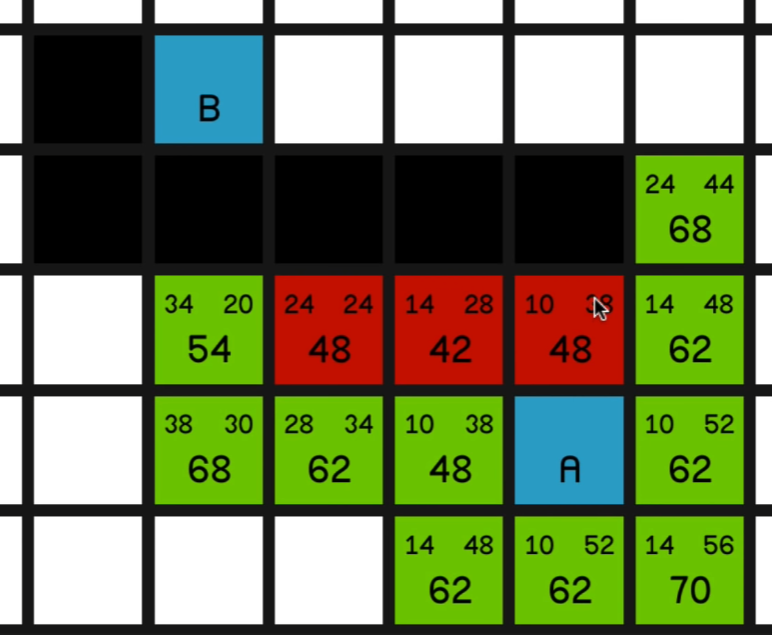
那么仍然选择 F 值最小的路径
然后是下一个F值最小的路径
然后是下一个
直到距离目的地的hCost为0
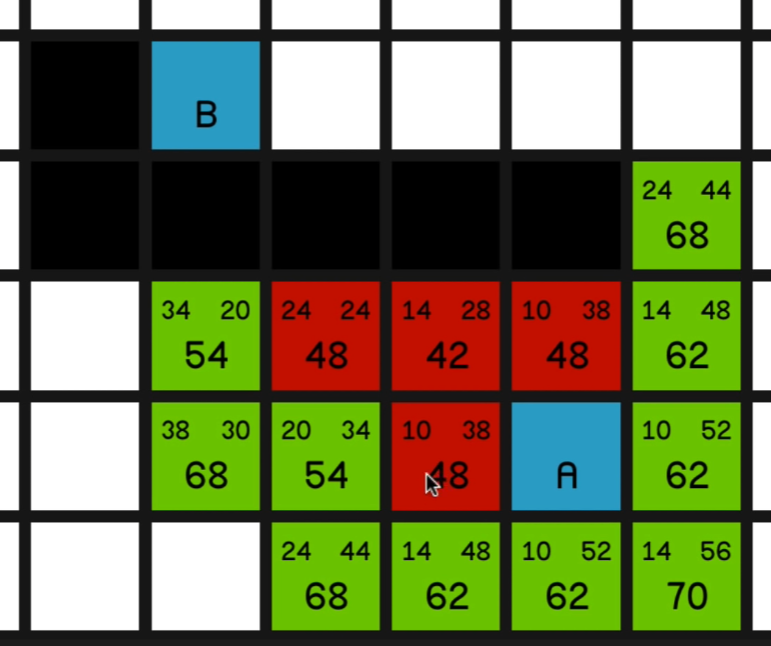
再来一个例子,这里说明如何找出最短的路径,箭头表示父节点

第一次计算A点周围节点的F值后,找出最小的那个,将节点的父节点设为A点
再次计算,将周围节点设为子节点,然后后发现周围有两个58的点,选中gCost更小也就是下面A旁边那个58的点
再次计算
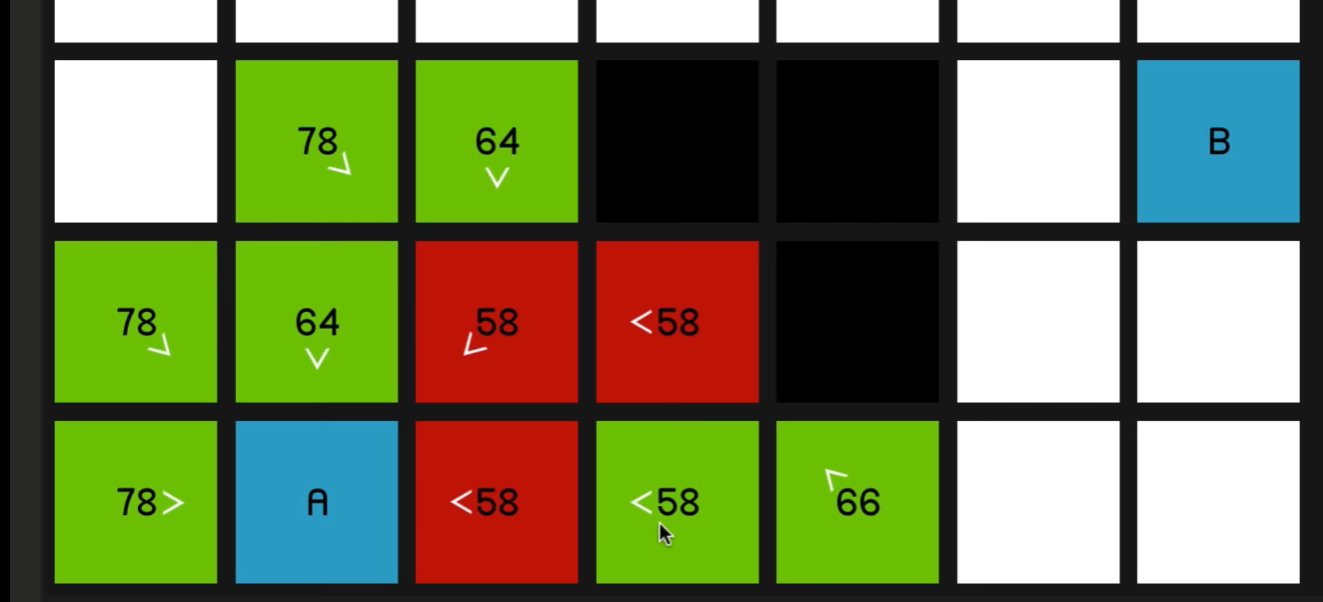
在计算过下面那个58节点后发现旁边节点从这里经过所需的cost更小,所以重新设置父节点
再次说明
如果经过黄线的路径,右下角节点的Cost会达到66

如果经过下面到达,Cost为58,会更小,会重新设置父节点
这里重新计算的fCost为 A — 58 — 58,fCost为58更小,说明新路径更小,重新设置父节点
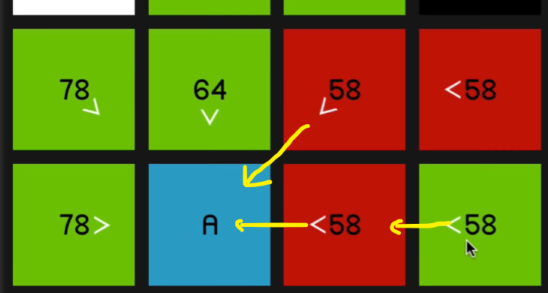
按照此方法循环直至找到目标点
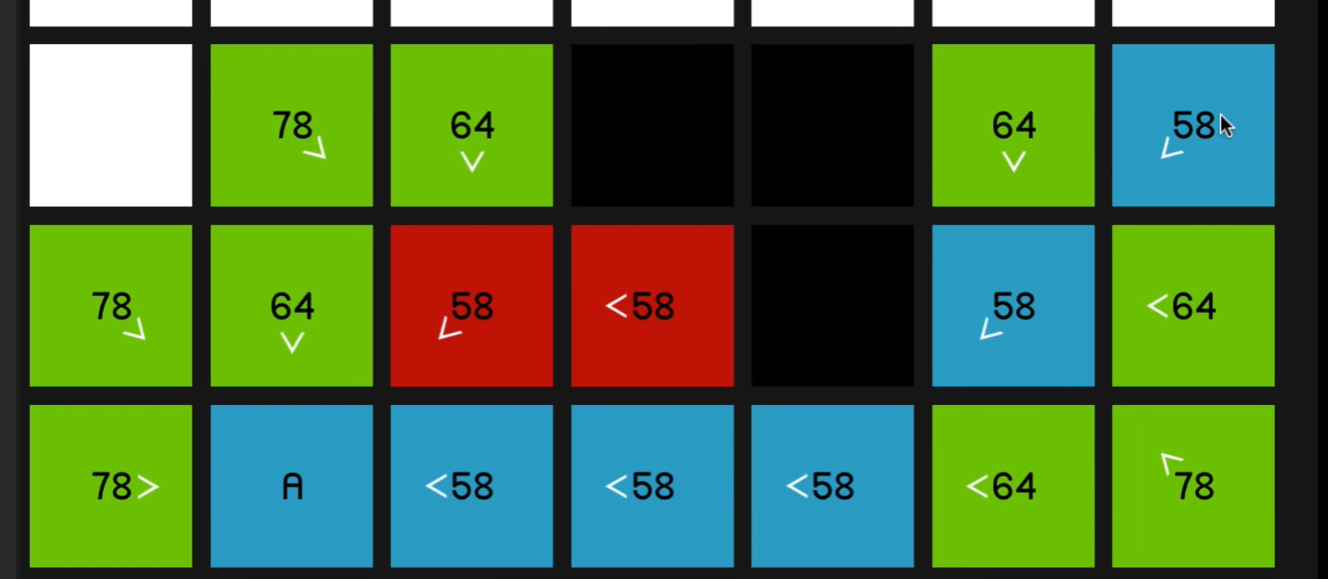
因为设置了父节点(图中箭头表示),那么只需要从目标点开始,一直获取父节点即可,将获取到的所有节点存储进列表或数组然后进行翻转,就得到了A-B的最短路径
二、在Unity中设置路径点
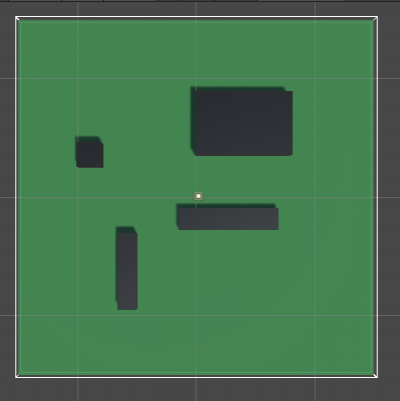
然后添加Cuble视为障碍物
将Cube的层级设为UnWalkable
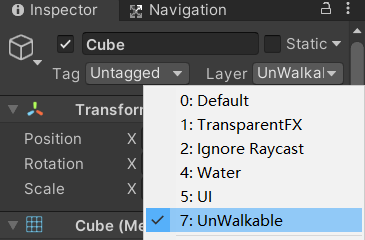
接着复制几个

新建脚本Node,节点目前只包含坐标位置,和是否能行走
public class Node
{
public bool walkable; //节点是否能走动
public Vector3 worldPos; //节点的空间坐标
public Node(bool _walkable, Vector3 _worldPos) //构造器
{
walkable = _walkable;
worldPos = _worldPos;
}
}
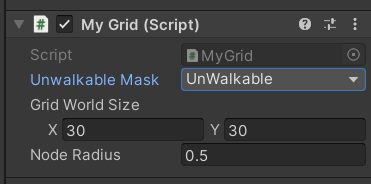
新建脚本MyGrid,添加到新建空物体A*上
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //节点是否能走动
public Vector2 gridWorldSize; //地图的范围,节点在地图内创建
public float nodeRadius; //节点的大小
Node[,] grid; //节点数组
private void OnDrawGizmos()
{
//首先画出地图的范围 //宽度 厚度 长度
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
}
}
然后设置节点地图大小
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
public LayerMask unwalkableMask; //是否能行走
public Vector2 gridWorldSize; //需要寻路的地图大小
public float nodeRadius; //节点半径
Node[,] grid; //节点
float nodeDiameter; //节点的直径
int gridSizeX, gridSizeY;
void Start()
{
nodeDiameter = nodeRadius * 2;
gridSizeX = Mathf.RoundToInt(gridWorldSize.x / nodeDiameter); //计算出x轴方向有多少个节点
gridSizeY = Mathf.RoundToInt(gridWorldSize.y / nodeDiameter); //计算出z轴方向有多少个节点
CreateGrid();
}
void CreateGrid()
{
grid = new Node[gridSizeX, gridSizeY]; //初始化节点数组
//计算网格的起始点(原点)
Vector3 worldButtonLeft = transform.position
- Vector3.right * gridWorldSize.x / 2
- Vector3.forward * gridWorldSize.y / 2;
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
//计算节点的空间坐标
Vector3 worldPoint = worldButtonLeft
+ Vector3.right * (x * nodeDiameter + nodeRadius)
+ Vector3.forward * (y * nodeDiameter + nodeRadius);
//判断节点是否能行走,根据节点范围是否与障碍物碰撞
bool walkable = !(Physics.CheckSphere(worldPoint, nodeRadius, unwalkableMask));
grid[x, y] = new Node(walkable, worldPoint); //将节点的数据添加进二位数组
}
}
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
foreach (Node node in grid)
{
//绘制出所有节点,可以行走为白色,不能行走为红色
Gizmos.color = (node.walkable) ? Color.white : Color.red;
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));//减少Gizmos方块的大小便于观察
}
}
}
}
运行结果
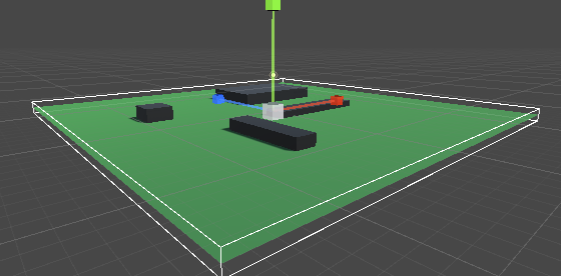
接下来添加一个起点和一个终点
新建两个Capsule

那么如何知道起点现在在哪个节点呢?
继续修改MyGrid
public class MyGrid : MonoBehaviour
{
......
public Node NodeFromWorldPos(Vector3 worldPos) //这里传入起点的位置
{
//这里 percentX 和 percentY 计算起点位置占地图区域横竖坐标的比例
float percentX = (worldPos.x + gridWorldSize.x / 2) / gridWorldSize.x;
float percentY = (worldPos.z + gridWorldSize.y / 2) / gridWorldSize.y;
//将起点的位置限定在地图范围之内
percentX = Mathf.Clamp01(percentX);
percentY = Mathf.Clamp01(percentY);
//总节点数量 * 所在区域比例 = 在第几个节点, -1 是为了从 0 开始计算,因为0也有一个节点
int x = Mathf.RoundToInt((gridSizeX - 1) * percentX);
int y = Mathf.RoundToInt((gridSizeY - 1) * percentY);
return grid[x, y];
}
private void OnDrawGizmos()
{
Gizmos.DrawWireCube(transform.position, new Vector3(gridWorldSize.x, 1, gridWorldSize.y));
if (grid != null)
{
//计算出起点的位置
Node playerNode = NodeFromWorldPos(player.position);
foreach (Node node in grid)
{
Gizmos.color = (node.walkable) ? Color.white : Color.red;
if (playerNode == node) //设置起点位置节点的颜色
{
Gizmos.color = Color.cyan;
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
运行结果
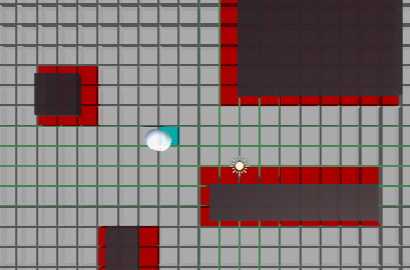
三、实现寻路算法
修改Node
public class Node
{
......
public int gridX; //地图中x方向第几个节点
public int gridY; //地图中y方向第几个节点
public int gCost; //g值
public int hCost; //h值
public Node parent; //父节点,最后用于存储实际路径
//重新添加了两个参数,便于计算邻近节点
public Node(bool _walkable, Vector3 _worldPos,int _gridX, int _gridY)
{
walkable = _walkable;
worldPos = _worldPos;
gridX = _gridX;
gridY = _gridY;
}
public int FCost //属性,F值
{
get
{
return gCost + hCost;
}
}
}
新建脚本PathFinding,并添加到物体A*上
public class PathFinding : MonoBehaviour
{
public Transform seeker, target; //声明两个坐标,起始点和目标点
private MyGrid grid;
......
private void Update()
{
FindPath(seeker.position, target.position); //计算路径
}
private void FindPath(Vector3 startPos, Vector3 targetPos)
{
Node startNode = grid.NodeFromWorldPos(startPos); //输入空间坐标,计算出起始点处于哪个节点位置
Node targwtNode = grid.NodeFromWorldPos(targetPos); //输入空间坐标,计算出目标点处于哪个节点位置
List<Node> openSet = new List<Node>(); //用于存储需要评估的节点
HashSet<Node> closedSet = new HashSet<Node>(); //用于存储已经评估的节点
openSet.Add(startNode); //将起始点加入openSet,进行评估
while (openSet.Count > 0) //如果还有待评估的节点
{
#region //获取待评估列表中 F 值最小的节点
Node currentNode = openSet[0]; //获取其中一个待评估的节点
for (int i = 0; i < openSet.Count; i++) //将该节点与所有待评估的节点比较,找出 F 值 最小的节点,F
//值相同就h值更小的节点
{
if (openSet[i].FCost < currentNode.FCost
|| openSet[i].FCost == currentNode.FCost
&& openSet[i].hCost < currentNode.hCost)
{
currentNode = openSet[i];
}
}
#endregion
openSet.Remove(currentNode); //待评估节点中去掉 F 值最小的节点
closedSet.Add(currentNode); //将该节点加入已评估的节点,之后不再参与评估
if (currentNode == targwtNode) //如果该节点为目标终点,就计算出实际路径并结束循环
{
RetracePath(startNode, targwtNode);
return;
}
//如果该节点不是目标点,遍历该点周围的所有节点
foreach (Node neighbor in grid.GetNeighbors(currentNode))
{
//如果周围某节点不能行走 或 周围某节点已经评估,为上一个节点,则跳过
// 说明某节点已经设置父节点
if (!neighbor.walkable || closedSet.Contains(neighbor))
{
continue;
}
//计算前起始点前往某节点的 gCost 值,起始点的 gCost 值就是0
//经过循环这里会计算周围所有节点的g值
int newMovementCostToNeighbor = currentNode.gCost + GetDinstance(currentNode, neighbor);
//如果新路线 gCost 值更小(更近), 或 某节点没有评估过(为全新的节点)
if (newMovementCostToNeighbor < neighbor.gCost || !openSet.Contains(neighbor))
{
neighbor.gCost = newMovementCostToNeighbor; //计算某节点gCost
neighbor.hCost = GetDinstance(neighbor, targwtNode); //计算某节点hCost
neighbor.parent = currentNode; //将中间节点设为某节点的父节点
//如果存在某节点gCost更小的节点,会重新将中间节点设为某节点父节点
if (!openSet.Contains(neighbor)) //如果某节点没有评估过
{
openSet.Add(neighbor); //将某节点加入待评估列表,在下一次循环进行评估,
//下一次循环又会找出这些周围节点 F 值最小的节点
}
}
}
}
}
private void RetracePath(Node startNode, Node endNode) //获取实际路径
{
List<Node> path = new List<Node>();
Node currentNode = endNode;
while (currentNode != startNode) //如果当前不为目标点
{
path.Add(currentNode); //将当前节点加入路径
currentNode = currentNode.parent;//获取下一个节点(当前节点的父节点)
}
path.Reverse(); //反转所有元素的顺序
grid.path = path; //返回实际路径
}
private int GetDinstance(Node nodeA, Node nodeB) //计算两个节点间的cost
{
int dstX = Mathf.Abs(nodeA.gridX - nodeB.gridX);
int dstY = Mathf.Abs(nodeA.gridY - nodeB.gridY);
if (dstX > dstY)
{
return 14 * dstY + 10 * (dstX - dstY);
}
return 14 * dstX + 10 * (dstY - dstX);
}
}
修改脚本MyGrid
public class MyGrid : MonoBehaviour
{
......
public List<Node> path;
......
void CreateGrid()
{
......
for (int x = 0; x < gridSizeX; x++)
{
for (int y = 0; y < gridSizeY; y++)
{
...... //多了两个参数,方便计算周围节点
grid[x, y] = new Node(walkable, worldPoint, x, y); //将节点的数据添加进二位数组
}
}
}
......
public List<Node> GetNeighbors(Node node) //获取节点周围的所有节点
{
List<Node> neighbors = new List<Node>();
//节点的相对坐标左侧为x-1,右侧为x+1,下方y-1,上方y+1
for (int x = -1; x <= 1; x++)
{
for (int y = -1; y <= 1; y++)
{
if (x == 0 && y == 0) //跳过中间的节点
{
continue;
}
//从x、y相对于中间节点的坐标 加上 中间节点位于地图的坐标,得到了周围节点位于地图的坐标
int checkX = node.gridX + x;
int checkY = node.gridY + y;
//限定节点范围,防止出现地图外的不存在的节点
if (checkX >= 0 && checkX < gridSizeX && checkY >= 0 && checkY < gridSizeY)
{
neighbors.Add(grid[checkX, checkY]);//添加周围节点
}
}
}
return neighbors;
}
private void OnDrawGizmos()
{
......
if (path != null)
{
if (path.Contains(node)) //给路径添加颜色
{
Gizmos.color = Color.yellow;
}
}
Gizmos.DrawCube(node.worldPos, Vector3.one * (nodeDiameter - 0.1f));
}
}
}
}
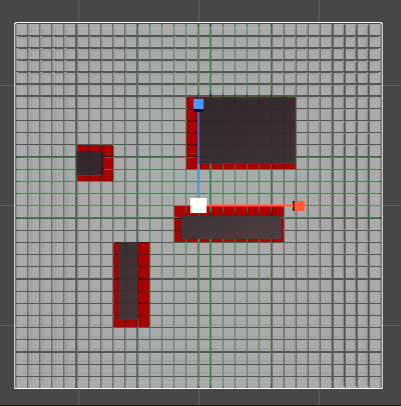
自行在Inspector面板中设置相应的参数
运行结果
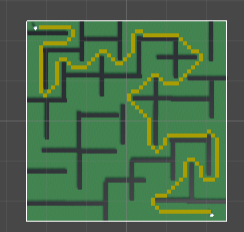
可以随时修改起点和终点的位置
演示视频:https://www.bilibili.com/video/BV14B4y127YN/
下一篇 A*寻路算法2.0 将使用数组实现堆来代替List列表存储节点,算法消耗的时间将减少约60%
Unity实现A*寻路算法学习1.0的更多相关文章
- Unity实现A*寻路算法学习2.0
二叉树存储路径节点 1.0中虽然实现了寻路的算法,但是使用List<>来保存节点性能并不够强 寻路算法学习1.0在这里:https://www.cnblogs.com/AlphaIcaru ...
- A* 寻路算法学习
代码小记 #include <iostream> #include <list> struct POINT { int X; int Y; }; // G: 起点到当前点的成本 ...
- A星寻路算法入门(Unity实现)
最近简单学习了一下A星寻路算法,来记录一下.还是个萌新,如果写的不好,请谅解.Unity版本:2018.3.2f1 A星寻路算法是什么 游戏开发中往往有这样的需求,让玩家控制的角色自动寻路到目标地点, ...
- 基于Unity的A星寻路算法(绝对简单完整版本)
前言 在上一篇文章,介绍了网格地图的实现方式,基于该文章,我们来实现一个A星寻路的算法,最终实现的效果为: 项目源码已上传Github:AStarNavigate 在阅读本篇文章,如果你对于里面提到的 ...
- cocos2d-x学习日志(13) --A星寻路算法demo
你是否在做一款游戏的时候想创造一些怪兽或者游戏主角,让它们移动到特定的位置,避开墙壁和障碍物呢?如果是的话,请看这篇教程,我们会展示如何使用A星寻路算法来实现它! A星算法简介: A*搜寻算法俗称A星 ...
- js实现A*寻路算法
这两天在做百度前端技术学院的题目,其中有涉及到寻路相关的,于是就找来相关博客进行阅读. 看了Create Chen写的理解A*寻路算法具体过程之后,我很快就理解A*算法的原理.不得不说作者写的很好,通 ...
- A*寻路算法的探寻与改良(二)
A*寻路算法的探寻与改良(二) by:田宇轩 第二部分:这部分内容主要是使用C语言编程实现A*, ...
- A*寻路算法lua实现
前言:并在相当长的时间没有写blog该,我觉得有点"颓废"该,最近认识到各种同行,也刚刚大学毕业,我认为他们是优秀的.认识到与自己的间隙,有点自愧不如.我没有写blog当然,部分原 ...
- 如何在Cocos2D游戏中实现A*寻路算法(六)
大熊猫猪·侯佩原创或翻译作品.欢迎转载,转载请注明出处. 如果觉得写的不好请告诉我,如果觉得不错请多多支持点赞.谢谢! hopy ;) 免责申明:本博客提供的所有翻译文章原稿均来自互联网,仅供学习交流 ...
随机推荐
- 使用Web Deploy自动打包发布
在内部测试阶段,经常改一点小东西需要更新给测试继续测试.然后就需要频繁的找到对应更改的视图/JS文件,或者是编译的dll文件,再打开测试服务器找到对应站点替换进去,整套流程下来就非常的繁琐费时. 使用 ...
- leedcode算法
1.LeetCode - 合并两个链表 2. 3. 链表是否有环 https://jingyan.baidu.com/article/066074d69afb8d83c31cb068.ht ...
- java反射和动态代理实现与原理详细分析
关于Java中的动态代理,我们首先需要了解的是一种常用的设计模式--代理模式,而对于代理,根据创建代理类的时间点,又可以分为静态代理和动态代理. 一.代理模式 代理模式是常用的java设计模式, ...
- InnoDB中加锁?
InnoDB 实现了两种类型的行锁,共享锁(S)与排他锁(X).然后由于 InnoDB引擎又支持表级锁,所以它内部又有意向共享锁(IS)与意向排他锁(IX).这两种表锁,都是InnoDB内部自动处理, ...
- 你能保证 GC 执行吗?
不能,虽然你可以调用 System.gc() 或者 Runtime.gc(),但是没有办法保证 GC 的执行.
- 调用高德地图web api 规划路线
实现地图输出,出发地与目的地路线,效果如下 具体代码如下 <!doctype html> <html> <head> <meta charset=" ...
- 攻防世界upload1
upload1 进入环境就一个上传,我们先上传一个普通的木马文件看看 木马内容 <?php @eval($_POST["cmd"]); ?> 估计是前端校验我们查看源码 ...
- 激光雷达 LOAM 论文 解析
转自:https://blog.csdn.net/hltt3838/article/details/109261334 固态激光雷达的一段视频:https://v.qq.com/x/page/a078 ...
- 原来 flexbox 是这么工作的
Flexbox 是一种 CSS 布局机制,可以说是目前浏览器原生支持的最好.使用最广泛的布局机制了.本文通过一些例子来说明 Flexbox 布局的工作原理,可以让我们更好的使用 Flexbox. 与 ...
- 纯CSS实现柱形图
CSS在处理排版之强大,没有做不到,只有想不到.下面我们将一同实现一个柱状图. 先打好一个具体的框架.我们利用无序列表做整体,里面的东西我们根本选择内联无素span,strong,em来填充. < ...