4.1 ROS元功能包
4.1 ROS元功能包
场景:完成ROS中一个系统性的功能,可能涉及到多个功能包,比如实现了机器人导航模块,该模块下有地图、定位、路径规划...等不同的子级功能包。那么调用者安装该模块时,需要逐一的安装每一个功能包吗?
显而易见的,逐一安装功能包的效率低下,在ROS中,提供了一种方式可以将不同的功能包打包成一个功能包,当安装某个功能模块时,直接调用打包后的功能包即可,该包又称之为元功能包(metapackage)。
概念
MetaPackage是Linux的一个文件管理系统的概念。是ROS中的一个虚包,里面没有实质性的内容,但是它依赖了其他的软件包,通过这种方法可以把其他包组合起来,我们可以认为它是一本书的目录索引,告诉我们这个包集合中有哪些子包,并且该去哪里下载。
例如:
- sudo apt install ros-noetic-desktop-full 命令安装ros时就使用了元功能包,该元功能包依赖于ROS中的其他一些功能包,安装该包时会一并安装依赖。
还有一些常见的MetaPackage:navigation moveit! turtlebot3 ....
作用
方便用户的安装,我们只需要这一个包就可以把其他相关的软件包组织到一起安装了。
实现
首先:新建一个功能包
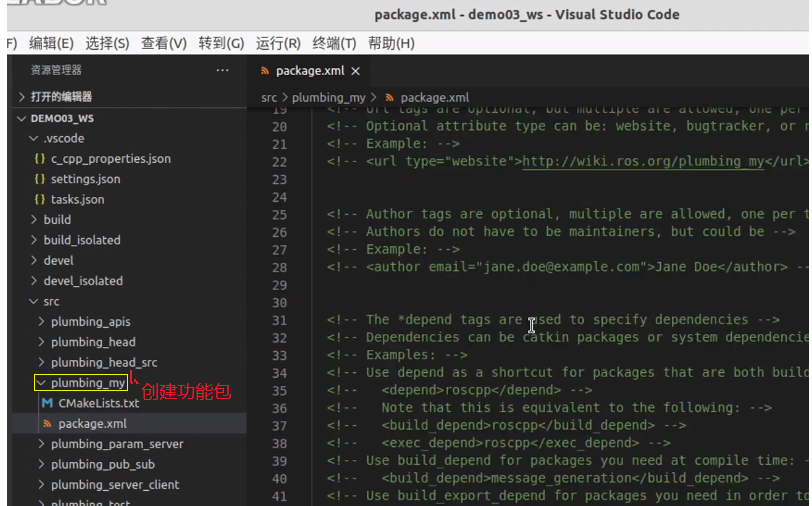
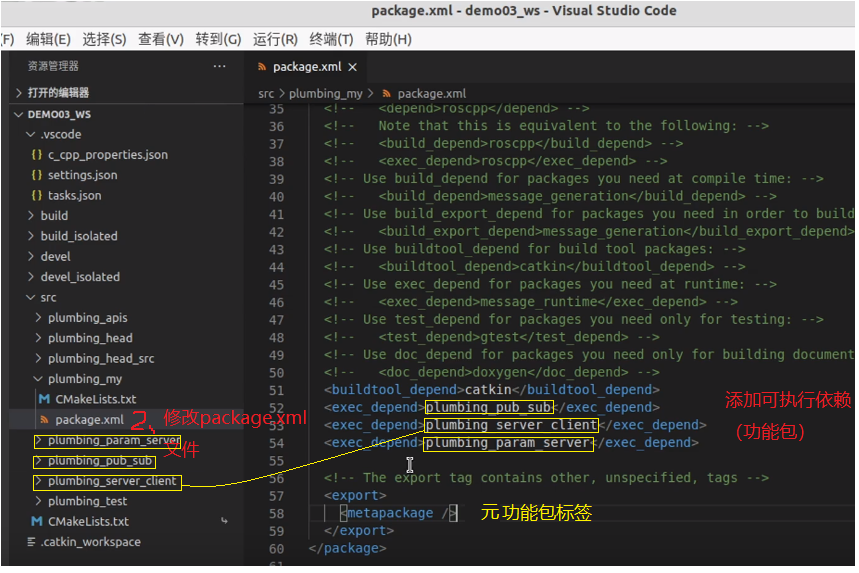
然后:修改package.xml ,内容如下:
<exec_depend>被集成的功能包</exec_depend>
.....
<export>
<metapackage />
</export>
最后:修改 CMakeLists.txt,内容如下:
cmake_minimum_required(VERSION 3.0.2)
project(demo)
find_package(catkin REQUIRED)
catkin_metapackage()
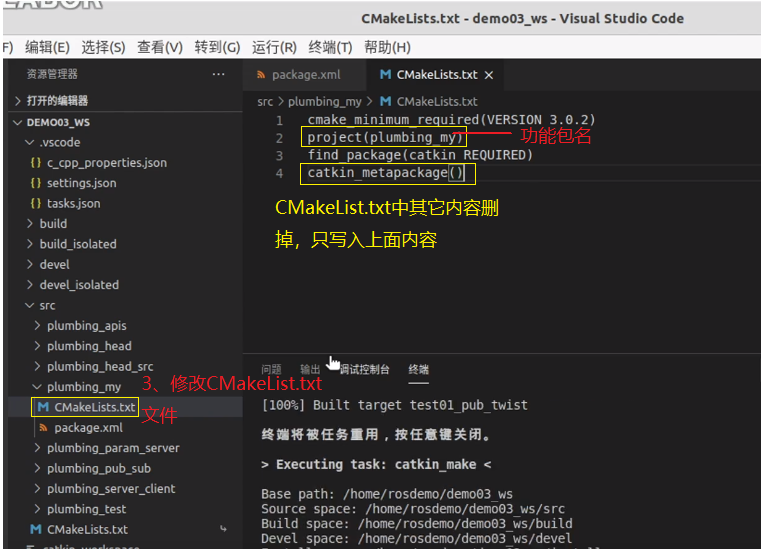
PS:CMakeLists.txt 中不可以有换行。
另请参考:
4.1 ROS元功能包的更多相关文章
- 在github上最热门好评高的ROS相关功能包
在github上最热门最受欢迎的ROS相关功能包 下面依次列出,排名不分先后: 1 Simulation Tools In ROS https://github.com/ros-simulation ...
- ROS新功能包PlotJuggler绘图
http://www.ros.org/news/2017/01/new-package-plotjuggler.html PlotJuggler,一个基于Qt的应用程序,允许用户加载,搜索和绘图数据. ...
- ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS)
ROS(indigo)机器人操作系统学习资料和常用功能包汇总整理(ubuntu14.04LTS) 1. 网站资源: ROSwiki官网:http://wiki.ros.org/cn GitHub ...
- 创建ROS功能包(四)
为了方便直接用ROS的create-pkg命令行工具 roscreate-pkg chapter2_tutorials std_msgs rospy roscpp std_msgs 包含了常见的消息类 ...
- (转)-编写第一个ROS(创建工作空间workspace和功能包package)
原文网址:http://www.cnblogs.com/liuamin/p/5704281.html 刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配 ...
- 编写第一个ROS(创建工作空间workspace和功能包package)
刚接触ROS,学着写了第一个程序,怕以后忘记,就将其步骤记录下来.. 首先你必须保证你电脑已安装配置好ROS. 1.创建工作空间(workspace) 我们所创建功能包package,应该全部放到一个 ...
- 在ros功能包CMakeLists.txt中获取所在功能包的路径 便于添加第三方库的相对路径
在 ros 功能包中要使用第三方的动态库,将其放在系统默认库路径和使用绝对路径均不可取,这样的话可移植性较差,将该功能包移到其它电脑时要重新配置依赖库的路径,太麻烦了. 于是找到下面这个方法,解决了R ...
- ROS功能包- rrt_exploration
一种基于RRT实现的多机器人地图探测算法的ROS软件包. 它还具有使用图像处理提取边界点.基于图像的边界检测等功能. 适用版本:indigo.jade.kinetic.lunar. 注意事项:官网文档 ...
- ROS-3 : Catkin工作空间和ROS功能包
一.创建一个Catkin工作空间 步骤一:构建catkin工作空间 安装完成ROS版本后,设置好环境变量:$ source /opt/ros/kinetic/setup.bash.然后即可创建一个ca ...
随机推荐
- 跟k8s工作负载Deployments的缘起缘灭
跟k8s工作负载Deployments的缘起缘灭 考点之简单介绍一下什么是Deployments吧? 考点之怎么查看 Deployment 上线状态? 考点之集群中能不能设置多个Deployments ...
- MySQL:输入密码后闪退的解决方法
原因:MySQL服务没有启动 解决方法:在 "服务" 中启动MySQL
- C语言刷 堆(优先队列)
703. 数据流中的第 K 大元素 /* 小根堆 */ typedef struct { int heapCapacity; int heapSize; int *heap; } KthLargest ...
- pandas模块篇(终章)及初识mataplotlib
今日内容概要 时间序列 针对表格数据的分组与聚合操作 其他函数补充(apply) 练习题(为了加深对DataFrame操作的印象) mataplotlib画图模块 今日内容详细 时间序列处理 时间序列 ...
- laravel7 下拉搜索
html:页面 首先给下拉框一个页面改变事件,将下拉框的值发送至后台,进行查询 <select name="interest" id="serarch" ...
- php 23种设计模型 - 工厂模式
工厂模式(Factory) 工厂模式(Factory Pattern)是 Java 中最常用的设计模式之一.这种类型的设计模式属于创建型模式,它提供了一种创建对象的最佳方式. 在工厂模式中,我们在创建 ...
- 压力测试工具——jmeter
Jmeter:这是一个绿色的工具,但是它需要依赖与jdk 8的环境,所以在安装的时候需要安装jdk8. 下载地址: 链接:https://pan.baidu.com/s/1pGj1hAqJBBoSHf ...
- nginx 访问php文件报错
问题图: An error occurred. 解决方法(windows版) php.cgi没有启动 cmd中找到cig.exe 的位置然后运行 php-cgi.exe -b 127.0.0.1: ...
- 免费云服务器-sanfengyun.com
找到了一个能提供免费云服务器的网站-sanfengyun.com,开通了一个免费云服务器,下载node,解压并安装,用npm装了vue-cli,初始化了一个vue项目,准备继续学习vue,加油.
- 恢复mysql管理员密码
1.向mysqld server 发送kill命令关掉mysqld server(不是 kill -9),存放进程ID的文件通常在MYSQL的数据库所在的目录/var/lib/mysql中.# kil ...