无人驾驶车辆路径跟踪的增量式PID控制
路径跟踪是无人车研究方向的一项关键技术。路径跟踪控制算法是指能够使无人车按照预设路径,安全稳定行驶的控制方法。
建立无人车路径跟踪模型
预设无人车在A、B两点间,当前位置为D点,航向为hF
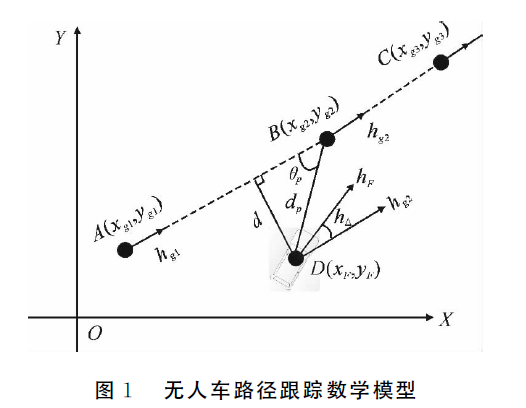
可以得到BD的距离dp ;D到AB的垂线段距离d;夹角θp的值;航向角差h△=hf-hg2;
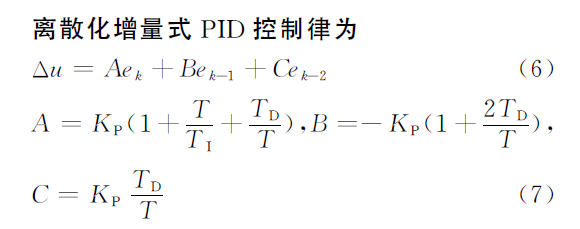
允许的误差范围为0.2m,在误差范围内和误差范围外的控制策略是不同的
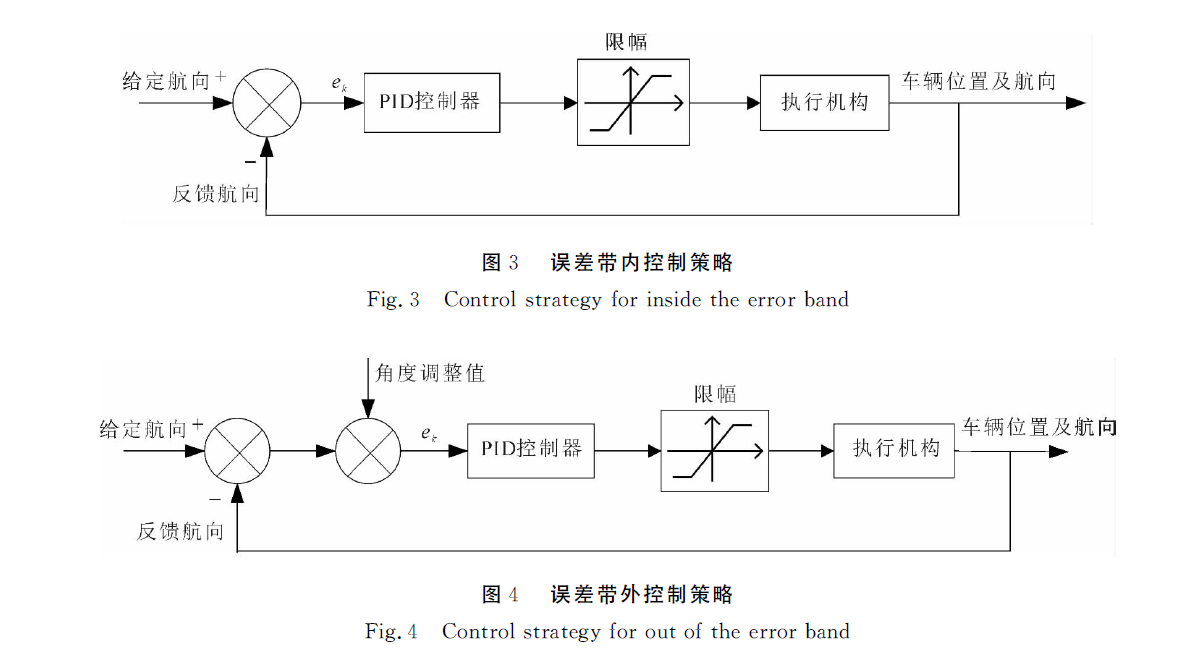
ek为航向给定量rk和反馈量ck的差值,控制器PID的输入量,δ为角度调整值
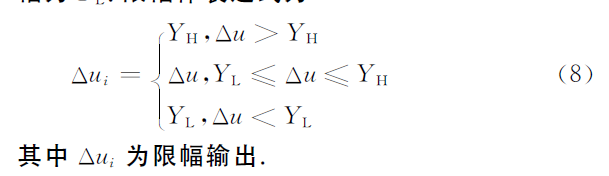
△u为控制器输出,Kp为比例系数,TI、TD分别为积分和微分时间,KI=1/TI;KD=TD;KI、KD分别为积分系数和微分系数
在PID算法中引入积分环节的主要目的是为了减小系统静差,提高系统的控制精度。
微分系数的引入主要是为了改善闭环系统的稳定性和动态响应速度,这是由于微分系统主要影响系统误差变化速率。
由于PID控制器输出是方向盘转角,车辆方向不会瞬时改变太大,因此对其采取限幅措施,得到限幅输出。即方向盘转角每次最多变化的角度。
控制算法的步骤:
1、计算ek的值:若车在误差带内,ek=rk-ck;若车在误差带外,ek=rk-ck-δ
2、确定积分系数:若ek的值大于ξ时,KI=0;若ek的值小于ξ时,KI等于设定值
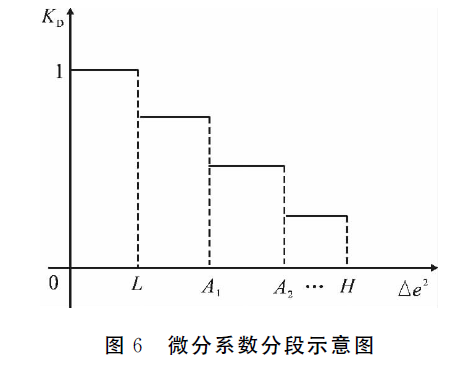
3、确定微分系数:定义误差变动量的平方值为Δe2=(ek -ek-1)2;KD的值由微分系数分段图得到
4、计算控制器输出△u,确定限幅输出
无人驾驶车辆路径跟踪的增量式PID控制的更多相关文章
- 增量式PID的matlab实现
首先,增量式PID的实现公式: 式中 Δe(k)=e(k)-e(k-1) 进一步可以改写成 式中 . . 为了便于理解,也可写成: 式中e(k)为第k次采样时的设定值与实际值的差,e(k-1 ...
- 位置式PID与增量式PID算法
位置式PID与增量式PID算法 PID控制是一个二阶线性控制器 定义:通过调整比例.积分和微分三项参数,使得大多数的工业控制系统获得良好的闭环控制性能. 优点 ...
- C 语言实现增量式PID
一直以来,pid都是控制领域的经典算法,之前尝试理解了很久,但还是一知半解,总是不得要领,昨天模仿着别人的代码写了一个增量式pid的代码. 我的理解就是pid其实就是对你设置的预定参数进行跟踪.在控制 ...
- 增量式PID计算公式4个疑问与理解
一开始见到PID计算公式时总是疑问为什么是那样子?为了理解那几道公式,当时将其未简化前的公式“活生生”地算了一遍,现在想来,这样的演算过程固然有助于理解,但假如一开始就带着对疑问的答案已有一定看法后再 ...
- 增量式PID简单翻板角度控制
1.研究背景 随着电子技术.信息技术和自动控制理论技术的完善与发展,近来微型处理器在控制方面的应用也越来越多.随之逐渐渗透到我们生活的各个领域.如导弹导航装置,飞机上仪表的控制,网络通讯与数据传输,工 ...
- 增量式PID的stm32实现(转)
源:增量式PID的stm32实现,整定过程 首先说说增量式PID的公式,这个关系到MCU算法公式的书写,实际上两个公式的写法是同一个公式变换来得,不同的是系数的差异. 资料上比较多的是: 还有一种是: ...
- 位置式PID与增量式PID
//位置式PID float Kp; float Ki; float Kd; float eSum,e0,e1; float pid_control(float now,float target) { ...
- 【转】位置式、增量式PID算法C语言实现
位置式.增量式PID算法C语言实现 芯片:STM32F107VC 编译器:KEIL4 作者:SY 日期:2017-9-21 15:29:19 概述 PID 算法是一种工控领域常见的控制算法,用于闭环反 ...
- 增量式pid和位置式PID参数整定过程对比
//增量式PID float IncPIDCalc(PID_Typedef* PIDx,float SetValue,float MeaValue)//err»ý·Ö·ÖÀë³£Êý { PIDx-& ...
随机推荐
- vue报错 Missing required prop: "value"-----(v-model 与 :model的区别)
找不到value值 原因:这个错是因为自己绑定值得问题,将v-model 写成了:model . v-model: 是vue内置的双向数据绑定,父子组件的双向绑定,通常用于input数据的双向绑定,用 ...
- vue单页应用中根据不同城市不同业务添加百度统计代码
问题描述: 我们知道一般的百度统计代码是添加在html的head里的:但是,因为目前项目是用vue开发的单页应用,所以在路由跳转之间不会刷新页面, 统计代码如果放在项目里的index.heml的hea ...
- 将div生成图片并下载下来
//文件需要引入html2canvas.js.jquery.js function downLoadImg(){ var element = $(".orgchart"); // ...
- java线程间的通讯
主要通过wait()和notify()方法进行线程间的通讯 class Product extends Thread{ String name; float price; boolean flag = ...
- Linux查看及设置系统时区
一.什么是时区呢? 关于时区的概念,其实初中地理课已经涉及,很多人都多少了解一些,可能只是细节搞不太清楚.为什么会将地球分为不同时区呢?因为地球总是自西向东自转,东边总比西边先看到太阳,东边的时间也总 ...
- zabbix的简单操作(查看监控,自定义监控和钉钉监控报警)
zabbix是一种监控软件,我用的是centos7.5版本 一:我已经添加好主机了,接下来就是看看怎么查看监控内容的 1.打开zabbix服务的web网页 2.检测最新数据,要在最新数据中筛选 3.查 ...
- Tableau Dashboard
Dashboard仪表盘,用来展示多个图表,并展示之间的联动,分析数据.
- pikachu-xss和csrf
简介 XSS是一种发生在Web前端的漏洞,所以其危害的对象也主要是前端用户 XSS漏洞可以用来进行钓鱼攻击.前端js挖矿.盗取用户cookie,甚至对主机进行远程控制 攻击流程 假设存在漏洞的是一个论 ...
- 【洛谷P2647】最大收益
题目大意 现在你面前有n个物品,编号分别为1,2,3,--,n.你可以在这当中任意选择任意多个物品.其中第i个物品有两个属性Wi和Ri,当你选择了第i个物品后,你就可以获得Wi的收益:但是,你选择该物 ...
- 「prufer」
prufer数列,可以用来解一些关于无根树计数的问题. prufer数列是一种无根树的编码表示,对于一棵n个节点带编号的无根树,对应唯一一串长度为n-1的prufer编码. (1)无根树转化为pruf ...