CS184.1X 计算机图形学导论(第四讲)
一、齐次变换
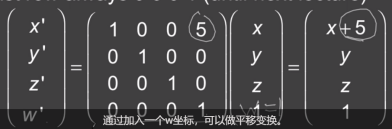
1、平移变换
变换矩阵不能包含X,Y,Z等坐标变量
如果x坐标向右平移了5个单位长度,则x~=x+5。在变换矩阵中表示的时候添加一个w坐标变量。通过加入一个w坐标,可以实现平移变换
1>如果w>0,这表示一个真实物理世界的点,因为你可以用x,y,z三个坐标初一w得到这个真是的点。
2>如果w=0,表示一个无穷远处的点
3>在实际应用中,w等于0通常用来表示一个向量
齐次坐标的优点:只需在渲染管线的最后做一次 除法(除以w)就能将齐次坐标转换为非齐次。
一般的平移矩阵:
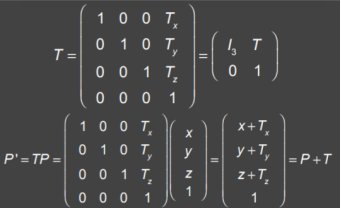
可以简写为2*2的矩阵,左上角是一个3*3的单位矩阵,T和0是向量,1是数值。
旋转总是相对于原点!!先做旋转再做平移,因为矩阵乘法是不可交换的
2、齐次坐标
齐次坐标的形式:简而言之,齐次坐标就是用N+1维来代表N维坐标
齐次坐标在电脑图形内无处不在,因为该坐标允许平移、旋转、缩放及透视投影等可表示为矩阵与向量相乘的一般向量运算。
我们可以在一个2D笛卡尔坐标末尾加上一个额外的变量w来形成2D齐次坐标,因此,一个点(X,Y)在齐次坐标里面变成了(x,y,w),并且有
X = x/w
Y = y/w
我们把齐次坐标转化为笛卡尔坐标的方法是前面n-1个坐标分量分别除以最后一个分量即可。
例如,笛卡尔坐标系下(1,2)的齐次坐标可以表示为(1,2,1),如果点(1,2)移动到无限远处,在笛卡尔坐标下它变为(∞,∞),然后它的齐次坐标表示为(1,2,0),因为(1/0, 2/0) = (∞,∞),我们可以不用”∞"来表示一个无穷远处的点了
3、旋转变换
先平移再旋转的结果: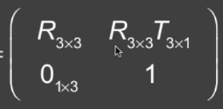
先旋转再平移的结果:
例题:
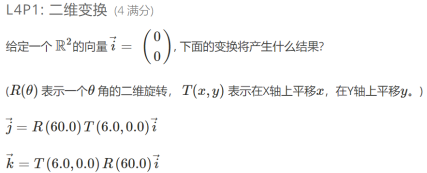
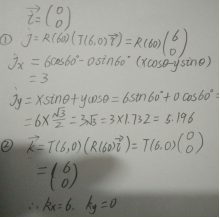
解:因为所变换的向量在后边,所以j是先平移再旋转,k是先旋转再平移,利用平移公式与旋转公式得出结果。
二、法向变换
这个公式要施加到曲面上所有的法向上,产生法向变换
例题:

解:
与M相关的法向变换Q=(M^−1)^T。
对于这里的旋转矩阵 R(a⃗ ,θ), 逆矩阵等于绕着相同的旋转轴旋转 −θ:
R(a⃗ ,θ)^−1=R(a⃗ ,−θ)
对这个矩阵转置产生相似的结果:R(a⃗ ,θ)^T=R(a⃗ ,−θ)
(R(a⃗ ,θ)^T=R(a⃗,θ)^−1 是旋转矩阵的一个特殊属性。)
组织起来我们得到:
R(a⃗,θ)^−T=R(a⃗,θ)
三、旋转和坐标系
坐标系分为世界坐标系和相机坐标系
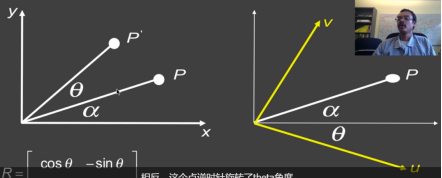
图一可看成P点逆时针旋转了θ角度,而图二可以看成坐标轴顺时针旋转了θ角度
从u,v轴分别向x,y轴画垂线,假设u,v长度为单位1,则u的坐标为(cosθ,-sinθ),v(sinθ,cosθ),对应旋转矩阵的数值
旋转矩阵的行可以看成新坐标轴的坐标

轴角公式:

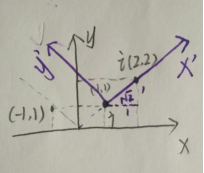
例题:

图解如下图所示:
现将标准坐标轴原点移动到新的原点处,根据新x,y画出新x,y轴的方向(也可以根据上边公式得出),i点当好在新x轴上,(根号2,0)
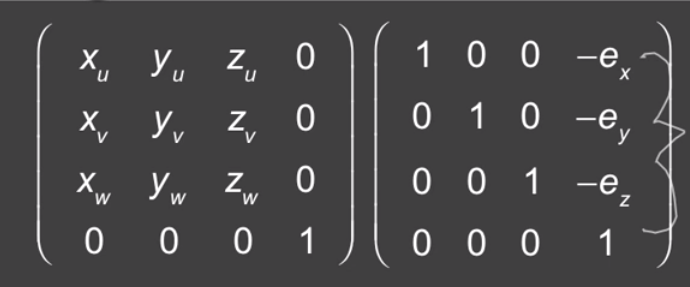
四、推导GLULOOKAT
1、定义:gluLookAt是OpenGL中观察变换的一个关键函数。
2、gluLookAt矩阵可以简要总结为:gluLookAt矩阵可以认为先将相机/视点平移到原点,然后绕着原点旋转,使得相机可以观察模型,通常,在OpenGL中相机朝着−z⃗方向观察。
在这里,平移向量就是视点坐标,更准确的说是负的视点坐标,因为不得不对世界坐标系做相反的平移
CS184.1X 计算机图形学导论(第四讲)的更多相关文章
- CS184.1X 计算机图形学导论 第3讲L3V1
二维空间的变换 L3V1这一课主要讲了二维空间的变换,包括平移.错切和旋转. 缩放 缩放矩阵 使用矩阵的乘法来完成缩放 缩放矩阵是一个对角矩阵,对角线上的值对应缩放倍数 错切(shear) 错切可以将 ...
- CS184.1X 计算机图形学导论(第五讲)
一.观察:正交投影 1.特性:保持平行线在投影后仍然是平行的 2.一个长方体,对处在只有深度不同的位置上的同一物体来说,它的大小不会改变. 3.透视投影:平行线在远处会相交(例如铁轨) 4.glOrt ...
- CS184.1X 计算机图形学导论 HomeWork1
最容易填写的函数就是left.输入为旋转的角度,当前的eye与up这两个三维向量 void Transform::left(float degrees, vec3& eye, vec3& ...
- CS184.1X 计算机图形学导论 罗德里格斯公式推导
罗德里格斯公式推导 图1(复制自wiki) 按照教程里,以图1为例子,设k为旋转轴,v为原始向量. v以k为旋转轴旋转,旋转角度为θ,旋转后的向量为vrot. 首先我们对v进行分解,分解成一个平行于k ...
- CS184.1X 计算机图形学导论L3V2和L3V3(部分)
组合变换 连接矩阵的优点是可以使用这些矩阵单独操作. 多个变换依然是一个矩阵. 连接矩阵不可交换,因为矩阵乘法不具有交换性. X3=RX2 X2=SX1 X3=R(SX1)=(RS)X1 X3≠SRX ...
- CS184.1X 计算机图形学导论 作业0
1.框架下载 在网站上下载了VS2012版本的作业0的框架,由于我的电脑上的VS是2017版的,根据提示安装好C++的版本,并框架的解决方案 重定解决方案目标为2017版本. 点击运行,可以出来界面. ...
- CS184.1X 计算机图形学导论(第三讲)
第一单元(介绍关于变换的数学知识) :基本二维变换 模型坐标系,世界坐标系 1.缩放 Scale(规模,比例) Sx表示在x方向上放大的倍数,Sy表示在y方向上放大的倍数,因此X坐标乘以Sx,Y坐标乘 ...
- MIT算法导论——第四讲.Quicksort
本栏目(Algorithms)下MIT算法导论专题是个人对网易公开课MIT算法导论的学习心得与笔记.所有内容均来自MIT公开课Introduction to Algorithms中Charles E. ...
- 计算机图形学 opengl版本 第三版------胡事民 第四章 图形学中的向量工具
计算机图形学 opengl版本 第三版------胡事民 第四章 图形学中的向量工具 一 基础 1:向量分析和变换 两个工具 可以设计出各种几何对象 点和向量基于坐标系定义 拇指指向z轴正 ...
随机推荐
- [洛谷P4172] WC2006 水管局长
问题描述 SC省MY市有着庞大的地下水管网络,嘟嘟是MY市的水管局长(就是管水管的啦),嘟嘟作为水管局长的工作就是:每天供水公司可能要将一定量的水从x处送往y处,嘟嘟需要为供水公司找到一条从A至B的水 ...
- phpjm解密程序,也适用于其他混淆加密的破解
<?php $file = 'plugin.php'; //要破解的文件 $fp = fopen($file, 'r'); $str = fread($fp, filesize($file)); ...
- 《Javascript设计模式与开发实践》关于设计模式典型代码的整理:单例模式、策略模式、代理模式、迭代器模式、发布-订阅模式、命令模式、组合模式
1.单例模式:保证一个类仅有一个实例,并提供一个访问它的全局访问点. 使用闭包封装私有变量// 使用闭包创建单例var user = (function () { var _name = 'sven' ...
- Largest Point
Largest Point Time Limit: 1500/1000 MS (Java/Others) Memory Limit: 65535/32768 K (Java/Others)Tot ...
- sqlserver库相关-表相关-3
原文: https://www.cnblogs.com/wlx520/p/4684441.html 库相关 建库 --创建School数据库之前:首先判断数据库是否存在,若存在则删除后再创建,若不存在 ...
- 2018 CCPC 吉林站 H Lovers || HDU 6562 (线段树哦)
http://acm.hdu.edu.cn/showproblem.php?pid=6562 题意: q次操作 1.将第l~r个数的左边和和右边都加上一个数d, 使得这个数变成 dsiddsid的形式 ...
- Python3实现简单的钉钉机器人调用
具体可以参考开发文档:https://ding-doc.dingtalk.com/doc#/serverapi3/iydd5h from urllib import parse, request im ...
- postman使用动态token发post请求小结
最近使用postman做接口测试,感觉挺好用的. 测试中,每次post请求都要携带一个token,token是通过get请求得来的,动态变化的,并且token有有效期的限制.为了避免重复获取token ...
- delphi 获取文件的最新修改时间 http://www.delphitop.com/html/wenjian/64.html
delphi 获取文件的最新修改时间 作者:admin 来源:未知 日期:2010/1/28 13:15:22 人气:1054 标签: QQ空间新浪微博腾讯微博腾讯朋友QQ收藏百度空间百度贴吧更多0 ...
- Vagrant 手册之 box - box 的信息格式
原文地址 创建 Vagrant 的 box 时,可以提供在运行 vagrant box list -i 时展示的与用户相关的其他信息.例如,可以打包 box,以包含有关该 box 的作者和网站信息: ...